一种针对山区地形图航测像控点布设装置及定位方法与流程
本发明涉及地形图航测,具体涉及一种针对山区地形图航测像控点布设装置及定位方法。
背景技术:
1、像控点是指摄影测量控制加密和测图的基础,野外像控点目标选择的好坏和指示点位的准确程度,直接影响测量结果的精度。像控点要能包围测区边缘以控制测区范围内的位置精度。一方面,纠正飞行器因定位受限或电磁干扰而产生的位置偏移、坐标精度过低等问题;另一方面,纠正飞行器因气压计产生的高层差值过大等其他因素。只有每个像控点都按照一定标准布设,才能使得内业更好的处理数据,使得三维模型达到一定精度。
2、然而现有的像控点布设装置,通常需要人工进行布设,这种方法不仅费时费力,还会极大的降低像控点的布设效率,并且在对山区进行像控点布设时,传统的布设方法会给工作人员带来一定的生命危险。
3、因此,有必要提供一种针对山区地形图航测像控点布设装置以解决上述问题。
技术实现思路
1、为实现上述目的,本发明提供如下技术方案,一种针对山区地形图航测像控点布设装置,包括:
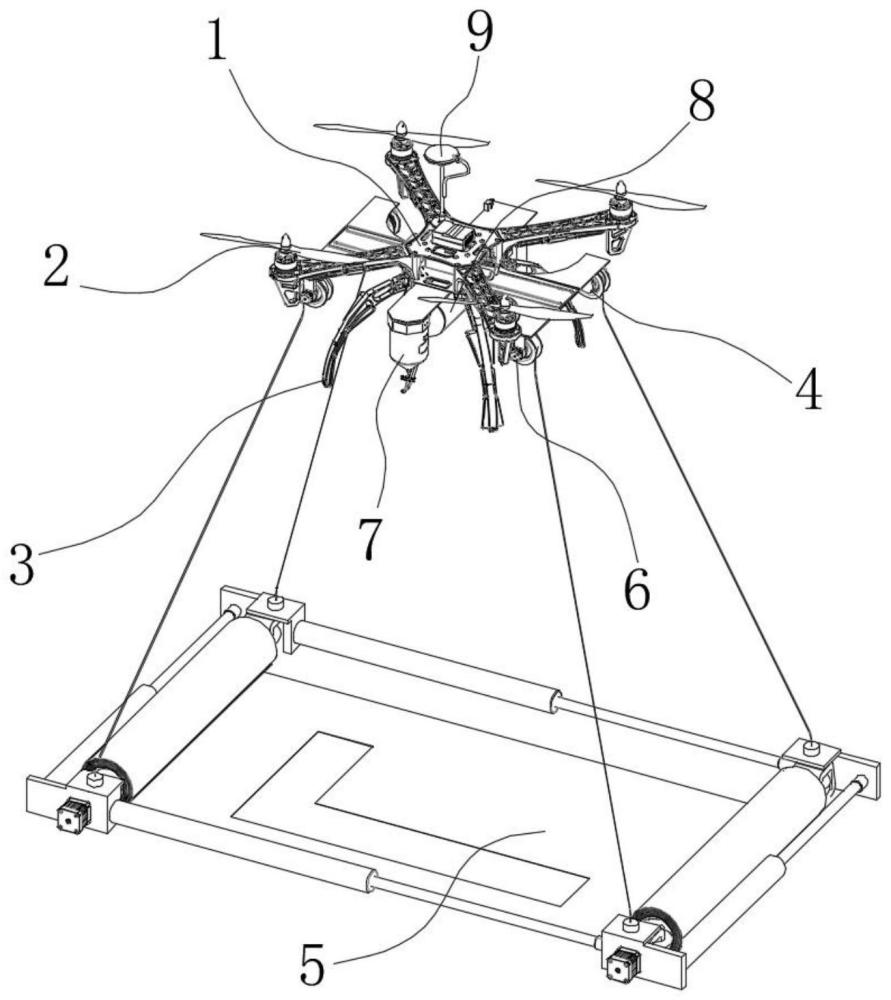
2、无人机机架,其上端固定装配有四组螺旋桨,其下端则设置有起落架,所述无人机机架下表面固定装配有四组收放绳盘,四组所述收放绳盘另一端固定装配有像控点模具,且每组所述收放绳盘一侧均固定装配有第一驱动电机;
3、所述无人机机架下表面好固定装配有喷涂组件以及定位钉钉入组件,其上表面则固定设置有gps-rtk定位装置;
4、所述无人机机架内部设置有警示灯、喊话器以及激光测距仪。
5、进一步,作为优选,所述像控点模具包括:
6、固定块,镜像设置有四组,分别固定装配在对应所述收放绳盘,纵向的两组固定块之间转动装配有第一弹簧,且所述第一弹簧一端设置有第二驱动电机,所述第二驱动电机固定装配在对应的固定块上;
7、四组所述固定块之间分别固定设置有纵向收缩液压缸以及横向收缩液压缸;
8、模具软布,其两端分别盘装在两组第一弹簧上,且所述模具软布上开设有多组像控点形状。
9、进一步,作为优选,所述定位钉钉入组件包括:
10、定位钉放置组件,固定装配在所述无人机机架下表面,其左侧固定放置有第三驱动电机,所述第三驱动电机下端的输出轴上固定装配有固定板,所述固定板上转动装配有转动板,所述转动板上滑动装配有滑动块,所述滑动块上固定设置有两组夹持固定爪;
11、弹射钉入组件,固定嵌装在所述无人机机架下表面。
12、进一步,作为优选,所述定位钉放置组件包括:
13、第四驱动电机,固定装配在所述无人机机架下表面,其右侧固定装配有固定底板,所述固定底板右侧固定装配有防尘套壳,所述防尘套壳下端开设有定位钉取放口;
14、所述防尘套壳内部放置有转动固定块,所述转动固定块左端固定装配在所述第四驱动电机的输出轴上,且所述转动固定块上卡装有定位钉。
15、进一步,作为优选,所述定位钉的一端固定设置有活塞固定块。
16、进一步,作为优选,所述弹射钉入组件包括:
17、固定壳,固定装配在所述无人机机架下侧板上端,其右侧固定装配有第五驱动电机,所述第五驱动电机的输出轴上固定装配有转动齿轮,所述转动齿轮右侧固定设置有力度调节组件,所述转动齿轮下端啮合设置有齿条,所述齿条竖直设置,其下端固定装配有滑动架,且所述齿条滑动嵌装在固定架上,所述固定架固定装配在所述固定壳内部。
18、进一步,作为优选,所述滑动架两端转动装配有第一连杆,两组所述第一连杆另一端转动装配有第二连杆,所述第二连杆一端转动装配在固定架上,且两组第二连杆与固定架之间固定装配有第二弹簧,所述第二弹簧下端固定装配有两组弹簧压缩块,所述弹簧压缩块下端固定装配有滑动板,所述滑动板同轴滑动装配在固定架下端,其上端固定设置有两组滑动架,所述滑动架滑动套装在固定架上,且所述滑动架与固定架之间固定装配有第三弹簧。
19、进一步,作为优选,所述力度调节组件包括:
20、第六驱动电机,固定装配在所述固定壳内部,其输出轴上固定装配有主动齿轮,所述主动齿轮右侧转动设置有转动架,所述转动架转动装配在转动齿轮上,且其另一端转动装配有调节齿轮,所述调节齿轮内侧与主动齿轮啮合,其外侧啮合设置有传动齿轮,所述传动齿轮上固定装配有调节丝杠,所述调节丝杠另一端转动装配在转动齿轮上,且其上螺纹装配有调节齿,所述调节齿滑动嵌装在转动齿轮上;
21、所述调节齿、调节丝杠以及传动齿轮设置有相邻设置有多组,且多组之间设置有无齿区。
22、进一步,作为优选,所述第六驱动电机的输出轴上设置有伸缩液压缸。
23、一种针对山区地形图航测像控点布设定位方法,包括以下步骤:
24、s1.针对该山区的土壤硬度特性调节力度调节组件,并根据项目区卫星地图提取布设像控点最佳位置,导入无人机控制app中;
25、s2.现场飞手操控无人机到达指定位置上空,观察周围情况,选择开阔无电线等遮挡物区域,提前打开警示灯和喊话器,同时利用无人机下降气流清扫着陆点的浮土和杂物;
26、s3.无人机降落稳定后,下放像控点模具,调整合适的像控点形状,使之贴合地面,打开喷涂组件对预设像控点喷涂;
27、s4.喷涂完成后,通过定位钉钉入组件,将定位钉钉入到像控点的恰当位置上;
28、s5.gps-rtk定位装置紧接着打开,平滑采集取平均值,测距仪测量像控点到定位置装置底座距离,最终进行换算得到像控点位置准确坐标数据;
29、s6.观察周围有无安全隐患,打开无人机螺旋桨,利用螺旋桨下降风快速吹干油漆;
30、s7.完成上述步骤后,无人机快速爬升到一定高度,利用摄像头对像控点进行俯视拍摄。
31、与现有技术相比,本发明提供了一种针对山区地形图航测像控点布设装置及定位方法,具有以下有益效果:
32、1.本发明中,设置有收放绳盘,其在吊装像控点模具的同时,使像控点模具的位置调整保留最大的自由度,同时收放绳盘的设置,使像控点模具在实现循环利用的同时,不对无人机的工作部署产生影响,所述像控点模具中,横向收缩液压缸与纵向收缩液压缸的运用,使其具有一定的收缩能力,在保护模具的同时,减小无人机的飞行阻力,像控点模具上的模具软布上设置有多组像控点形状,且多组所述像控点形状的具体形状均不相同,使装置工作时可以根据不同的布设规则进行选择,进而便于识别,提高装置的精准程度。
33、2.本发明中,通过定位钉钉入组件在完成像控点喷漆操作后,通过机械配合,自主的完成定位钉的钉入工作,同时为防止在不同的土壤条件下,定位钉钉入深度不同,从而对航测结果产生影响,故加设力度调节组件,使其针对不同的土壤条件增大或减小弹射钉入组件对定位钉的弹力,进而保证定位钉在不同土壤条件下的深度,进一步增强航测的准确性。
34、3.本发明中,抛弃除无人机操作人员之外的工作人员,使整个像控点的布设过程由工作人员通过无人机操作完成,大大降低了传统布设过程中存在的安全风险。
- 还没有人留言评论。精彩留言会获得点赞!