一种多探头星敏感器测量系统使用方法与流程
本发明实施例涉及航天器姿态控制,特别涉及一种多探头星敏感器测量系统使用方法。
背景技术:
1、星敏感器是目前各类航天器上精度最高的姿态测量器件,是卫星完成正常功能的重要基石。传统星敏感器通常采用单个探头对应单个处理器的结构,因此,单个探头在卫星上的安装可提前确定,且在轨不会再发生变化。
2、多探头星敏感器利用单处理器线路处理来自多个探头的图像信息,通过星图融合,获得更高的姿态确定精度、更好的可靠性和更优的动态性能的同时,其成本、重量和功耗并没有显著增加,因此在单机的性能指标上具有一定的优势。
3、但多探头星敏感器具有多个独立探头,每个线路均可处理所有探头的星图数据并生成一个融合的星图数据。该体系架构决定了融合星图对应的融合基准可以切换至探头中任何一个。融合基准可切换的特点,降低了系统的安全性。
技术实现思路
1、基于多探头星敏感器测量系统安全性低的问题,本发明实施例提供了一种多探头星敏感器测量系统使用方法。
2、本发明实施例提供了一种多探头星敏感器测量系统使用方法,应用于多探头星敏感器测量系统,所述多探头星敏感器测量系统包括:多探头星敏感器和姿轨控计算机,所述多探头星敏感器包括星敏感器线路和多个独立的探头,各探头分设于卫星不同位置,用于拍摄星图,所述星敏感器线路与所有探头均连接,用于获取所有探头拍摄的星图,并解算姿态向量;姿态向量包括姿态四元素,用于表示探头在j2000坐标系下的姿态;
3、该方法包括如下步骤:
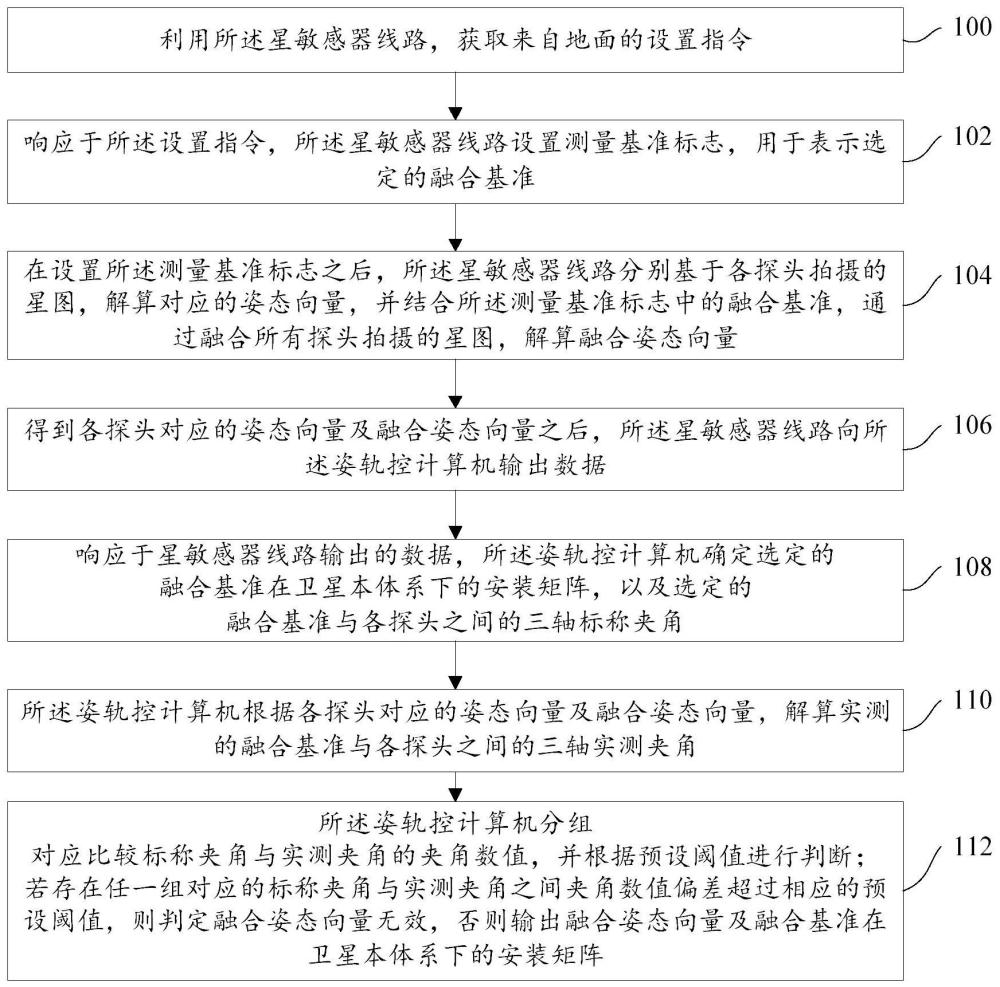
4、利用所述星敏感器线路,获取来自地面的设置指令;其中,所述设置指令包括选定的融合基准,融合基准可设置为任一探头;
5、响应于所述设置指令,所述星敏感器线路设置测量基准标志,用于表示选定的融合基准;
6、在设置所述测量基准标志之后,所述星敏感器线路分别基于各探头拍摄的星图,解算对应的姿态向量,并结合所述测量基准标志中的融合基准,通过融合所有探头拍摄的星图,解算融合姿态向量;其中,融合姿态向量对应融合星图;
7、得到各探头对应的姿态向量及融合姿态向量之后,所述星敏感器线路向所述姿轨控计算机输出数据;输出的数据包括各探头对应的姿态向量、融合姿态向量和所述测量基准标志;
8、响应于星敏感器线路输出的数据,所述姿轨控计算机确定选定的融合基准在卫星本体系下的安装矩阵,以及选定的融合基准与各探头之间的三轴标称夹角;
9、所述姿轨控计算机根据各探头对应的姿态向量及融合姿态向量,解算实测的融合基准与各探头之间的三轴实测夹角;实测的融合基准与实际获得的融合星图及融合姿态向量对应;
10、所述姿轨控计算机分组对应比较标称夹角与实测夹角的夹角数值,并根据预设阈值进行判断;若存在任一组对应的标称夹角与实测夹角之间夹角数值偏差超过相应的预设阈值,则判定融合姿态向量无效,否则输出融合姿态向量及融合基准在卫星本体系下的安装矩阵。
11、可选地,所述星敏感器线路设置测量基准标志,用于表示选定的融合基准,包括:
12、所述星敏感器线路以参数flagbase@sts代表测量基准标志,flagbase@sts=mi表示融合基准为第i个探头,mi∈{mi}n,{mi}n为自然数集合,且集合内的元素各不相同,n表示探头的总个数;
13、所述星敏感器线路根据所述设置指令设置参数flagbase@sts,若所述设置指令包含属于集合{mi}n的自然数,则所述星敏感器线路将参数flagbase@sts置为对应的自然数,否则令参数flagbase@sts保持不变。
14、可选地,所述结合所述测量基准标志中的融合基准,通过融合所有探头拍摄的星图,解算融合姿态向量,包括:
15、根据各探头对应的姿态向量,确定融合基准与除融合基准之外的各探头之间的姿态转换矩阵;
16、分别根据对应的姿态转换矩阵,将各探头对应的观测星矢量投影至融合基准坐标系;其中,观测星矢量根据星图确定;
17、基于融合基准对应的观测星矢量及各探头对应的观测星矢量投影,解算得到融合姿态向量。
18、可选地,所述星敏感器线路向所述姿轨控计算机输出数据,包括:
19、所述星敏感器线路利用数据总线向所述姿轨控计算机输出一个数据帧,该数据帧中包括各探头对应的姿态向量、融合姿态向量和所述测量基准标志;所述测量基准标志以参数flagbase@sts表示。
20、可选地,所述姿轨控计算机确定选定的融合基准在卫星本体系下的安装矩阵,以及选定的融合基准与各探头之间的三轴标称夹角,包括:
21、所述姿轨控计算机根据星敏感器线路输出数据中的所述测量基准标志,确定融合基准;
22、根据确定的融合基准,在各探头对应的安装矩阵中进行筛选,确定融合基准对应的在卫星本体系下的安装矩阵;
23、根据确定的融合基准,确定与各探头之间的三轴夹角。
24、可选地,所述姿轨控计算机根据各探头对应的姿态向量及融合姿态向量,解算实测的融合基准与各探头之间的三轴实测夹角,包括:
25、所述姿轨控计算机根据各探头对应的姿态向量及融合姿态向量,分别解算各探头与实测的融合基准之间的姿态转换矩阵;所述姿态转换矩阵用于表示一个探头对应的坐标系与另一个探头对应的坐标系之间的变换关系;
26、根据各探头与实测的融合基准之间的姿态转换矩阵,解算实测的融合基准与各探头之间的三轴实测夹角。
27、可选地,所述星敏感器线路设置测量基准标志,还包括:
28、当获取的所述设置指令不包含属于集合{mi}n的自然数,则报错。
29、可选地,当所述多探头星敏感器的星敏感器线路上电或复位,所述星敏感器线路将参数flagbase@sts设为flagbase@sts=m1;m1表示默认的融合基准。
30、可选地,所述姿轨控计算机根据星敏感器线路输出数据中的所述测量基准标志,确定融合基准,包括:
31、所述姿轨控计算机以参数flagbase@aocc代表测量基准标志,参数flagbase@aocc=mi表示融合基准为第i个探头;参数flagbase@aocc的初始值取值与flagbase@sts初始值保持一致;
32、所述姿轨控计算机根据星敏感器线路输出数据中的参数flagbase@sts,设置参数flagbase@aocc,若参数flagbase@sts属于集合{mi}n的自然数,则所述星敏感器线路将参数flagbase@aocc置为对应的自然数,否则令参数flagbase@aocc保持不变,并报错。
33、可选地,各探头对应的安装矩阵,通过在地精测确定。
34、本发明实施例提供了一种多探头星敏感器测量系统使用方法,本发明利用星敏感器获取来自地面的设置指令,确定星敏感器融合基准,并输出数据至姿轨控计算机,姿轨控计算机不直接获取设置指令,避免星敏感器和姿轨控计算机出现信息不同步的问题,提高安全性;姿轨控计算机接收来自星敏感器的数据,确定融合基准对应的安装矩阵,并比较关于融合测量的标称夹角和实测夹角,判断是否出现异常。本发明能够提高系统安全性,确保正确使用融合信息解算卫星本体姿态。
- 还没有人留言评论。精彩留言会获得点赞!