一种轮胎垂向力测量装置及测量方法与流程
本发明涉及车辆工程技术领,尤其是涉及一种轮胎垂向力测量装置及测量方法。
背景技术:
1、轮胎垂向力实时测量具有重大意义,通过对轮胎垂向力进行测量,不仅可以真实记录轮胎,以使用情况提升轮胎寿命,还可以提高车辆控制的平顺性及操纵稳定性。智能轮胎通常是在轮胎内部搭建传感器系统,实现轮胎接地应变、加速度等信号的实时采集与传输,从而实现监测轮胎受力。
2、现有的轮胎垂向力测量装置通常是将加速度传感器设置于轮胎外侧,直接基于加速度信号求解接地时间等信息,并进一步计算的都轮胎垂向力,但是由于加速度信号的准确度容易受到外界环境影响,容易出现较大的计算误差,导致难以准确测量轮胎垂向力。
技术实现思路
1、本发明提供一种轮胎垂向力测量装置及测量方法,以解决现有的轮胎垂向力测量装置由于设置在轮胎外侧的加速度传感器所获取得到的加速度信号的准确度容易受到外界环境影响,容易出现较大的计算误差,导致难以准确测量轮胎垂向力的技术问题。
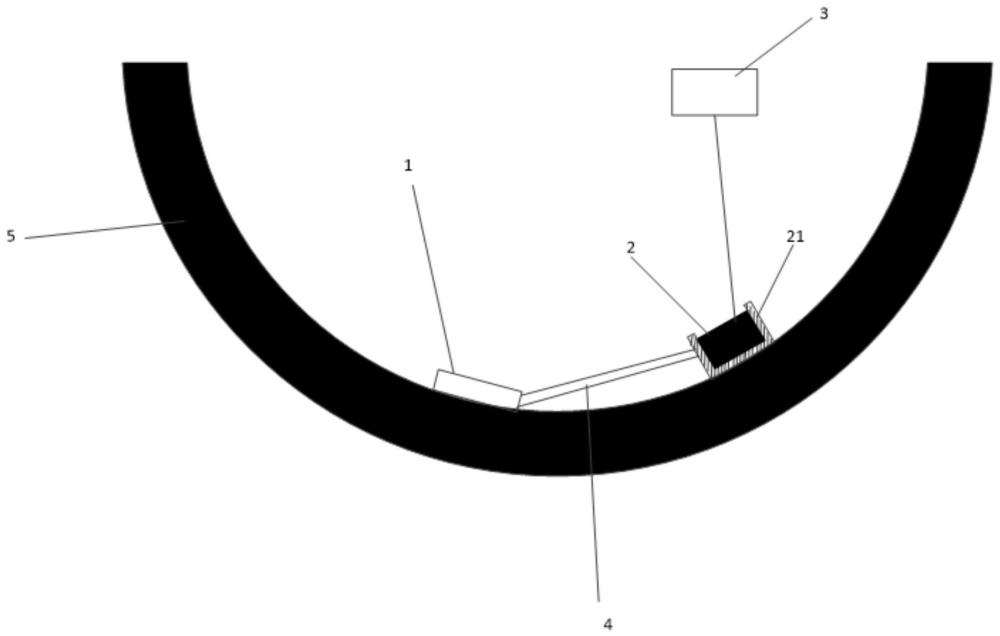
2、本发明提供了一种轮胎垂向力测量装置,包括:
3、应变传感模块、数据传输模块和控制模块;
4、所述应变传感模块和所述数据传输模块均设置于待测量轮胎的内侧;
5、所述应变传感模块与所述数据传输模块连接,所述数据传输模块与所述控制模块连接;
6、所述应变传感模块包括应变传感器,所述应变传感器包括橡胶材质的上基底、橡胶材质的下基底、敏感层和传感器端子;
7、所述敏感层设置在所述上基底和所述下基底之间,所述传感器端子设置在所述应变传感器两侧;
8、所述数据传输模块设置有胶套外壳;
9、所述应变传感模块用于获取待测量轮胎的应变波形,并将所述应变波形传输至所述数据传输模块;
10、所述数据传输模块用于接收所述应变波形,并将所述应变波形传输至所述控制模块;
11、所述控制模块用于根据所述应变波形进行轮胎垂向力测量得到待测量轮胎的轮胎垂向力。
12、本发明还提供了一种轮胎垂向力测量方法,适用于如上述的轮胎垂向力测量装置,包括:
13、根据所述应变传感模块获取的应变波形,获取所述待测量轮胎的接地时间和旋转周期时间,根据所述接地时间和所述旋转周期时间计算得到所述待测量轮胎的接地角度;
14、根据所述接地角度和所述待测量轮胎的自由滚动半径,计算得到所述待测量轮胎的接地印痕长度;
15、根据所述旋转周期时间、所述待测量轮胎的直径和应变传感器的采样频率,计算得到所述待测量轮胎的速度;
16、基于所述接地印痕长度、所述自由滚动半径、所述轮胎垂向力和轮胎垂向刚度,构建得到第一动力学模型;
17、根据所述待测量轮胎的速度和所述第一动力学模型,求解得到所述待测量轮胎的轮胎垂向力。
18、进一步的,根据所述应变传感模块获取的应变波形,获取所述待测量轮胎的接地时间和旋转周期时间,包括:
19、根据所述应变传感模块获取的应变波形,获取所述应变传感器的多个数据点,并对每一数据点分别进行一阶求导、二阶求导和三阶求导;
20、在第n+2个数据点的二阶导与前一个点或后一个点的二阶导相乘小于等于0,且当前数据点的三阶导大于0时,将所述当前数据点放入一阶导波谷候选数据点集合中,n为第1个数据点;
21、若所述当前数据点为最后一个数据点,清除所述一阶导波谷候选数据点集合中一阶导小于设定阈值的点;
22、从所述一阶导波谷候选数据点集合剩余数据点的第一个数据点开始,建立设定宽度窗口,根据所述设定宽度窗口提取一阶导最小的数据点至一阶导波谷数据点集合中,直至所述一阶导波谷候选数据点集合中无剩余的数据点;
23、以所述一阶导波谷数据点集合中每个数据点为右边缘,建立设定宽度窗口,根据所述设定宽度窗口提取所述一阶导波谷数据点集合中一阶导值最大的数据点值一阶导波峰数据点集合中;
24、以一阶导波谷数据点集合中的数据点为起点,设定当前数据点为a,下一数据点为b,若a≥b,将b赋予a,b为下一个数据点,直至b>a时,数据点c为a的上一个数据点,若c=a,将c赋予a,c为上一个数据点,直至c>a,将a作为后波谷,遍历所述一阶导波谷数据点集合中的所有数据点,获取所述一阶到波谷数据点集合中的所有后波谷;
25、以一阶导波峰数据点集合中的数据点为起点,设定当前数据点为a,上一数据点为b,若a≥b,将b赋予a,b为上一个数据点,直至b>a时,数据点c为a的下一个数据点,若c=a,将c赋予a,c为下一个数据点,直至c>a,将a作为钱波谷,遍历所述一阶导波峰数据点集合中的所有数据点,获取所述一阶到波峰数据点集合中的所有前波谷;
26、根据前波谷和所述后波谷确定所述待测量轮胎的接地时间。
27、进一步的,所述根据所述接地时间和所述旋转周期时间计算得到所述待测量轮胎的接地角度,包括:
28、将所述接地时间和所述旋转周期时间的比值记为轮胎的接地占比;
29、将所述接地占比与所述旋转周期时间对应的角度相乘,得到所述待测量轮胎的接地角度,所述旋转周期时间对应的角度为360°。
30、进一步的,所述根据所述接地角度和所述待测量轮胎的自由滚动半径,计算得到所述待测量轮胎的接地印痕长度,包括:
31、根据以下公式计算得到所述待测量轮胎的接地印痕长度:
32、l=r0*sinθ
33、cl=2l
34、其中,接地印痕半长,r0为自由滚动半径,θ为接地角度的一半,cl为接地印痕长度。
35、进一步的,根据所述旋转周期时间、所述待测量轮胎的直径和应变传感器的采样频率,计算得到所述待测量轮胎的速度,包括:
36、根据以下公式计算得到所述待测量轮胎的速度:
37、
38、其中,v为所述待测量轮胎的速度,d为所述待测量轮胎的直径,f为应变传感器的采样频率,l为待测量轮胎的旋转周期时间。
39、进一步的,所述第一动力学模型为:
40、
41、其中,cl为接地印痕长度,r0为自由半径,fz为垂向力,cz为垂向刚度,k1,k2为待拟合次数。
42、进一步的,所述根据所述待测量轮胎的速度和所述第一动力学模型,求解得到所述待测量轮胎的轮胎垂向力,包括:
43、将所述第一动力学模型近似为如下的第二动力学模型:
44、
45、其中,p为胎压;
46、将轮胎的速度代进所述第二动力学模型进行修正,得到如下的第三动力学模型:
47、
48、求解所述第三动力学模型,得到所述待测量轮胎的轮胎垂向力。
49、本发明还提供了一种轮胎垂向力测量装置,包括:
50、接地角度计算模块,用于根据所述应变传感模块获取的应变波形,获取所述待测量轮胎的接地时间和旋转周期时间,根据所述接地时间和所述旋转周期时间计算得到所述待测量轮胎的接地角度;
51、接地印痕长度计算模块,用于根据所述接地角度和所述待测量轮胎的自由滚动半径,计算得到所述待测量轮胎的接地印痕长度;
52、轮胎速度计算模块,用于根据所述旋转周期时间、所述待测量轮胎的直径和应变传感器的采样频率,计算得到所述待测量轮胎的速度;
53、动力学模型构建模块,用于基于所述接地印痕长度、所述自由滚动半径、所述轮胎垂向力和轮胎垂向刚度,构建得到第一动力学模型;
54、轮胎垂向力求解模块,用于根据所述待测量轮胎的速度和所述第一动力学模型,求解得到所述待测量轮胎的轮胎垂向力。
55、本发明还提供了一种存储介质,所述存储介质包括存储的计算机程序,其中,在所述计算机程序运行时控制所述存储介质所在设备执行如上述的一种轮胎垂向力测量方法。
56、本发明通过在轮胎内侧设置有应变传感器,应变传感器中的橡胶材质的上基底和下基底能够使得应变传感器与轮胎同步进行应变,从而能够根据应变传感器的应变波形,准确反应轮胎的应变情况,且应变传感器输出的应变波形中其接地区波形明显,能够根据街地区波形的数据点,准确计算得到轮胎的接地时间和旋转周期时间,进而能够准确根据轮胎的接地时间和旋转周期时间计算得到轮胎垂向力,能够有效提高轮胎垂向力测量的准确性。
- 还没有人留言评论。精彩留言会获得点赞!