导航RTK信号丢失时的履带式农业机械导航方法及系统
本发明属于车辆导航,具体涉及导航rtk信号丢失时的履带式农业机械导航方法及系统。
背景技术:
1、农机导航系统由卫星导航系统、地理信息系统、控制单元、显示器和操作界面组成。它的重要性在于提高农业生产效率和准确性,实现自动导航和驾驶,提升作业精度和一致性,记录和分析作业数据,节约成本和资源。
2、目前传统履带式农业机械已经满足可以在rtk信号良好的情况下进行路径追踪作业,但是在进行无人驾驶控制时,由于其他高大物体的遮蔽或者干扰,会导致信号出现丢失的情况,出现农业机械行驶路径偏移规划路线或者农业机械直接停止运行的情况,严重制约农业导航技术的发展与提升,因此解决这个问题非常迫切。
技术实现思路
1、本发明旨在解决现有技术的不足,提出导航rtk信号丢失时的履带式农业机械导航方法及系统,通过控制器内部计算获取农业机械信号丢失后的位置及状态信息,当农业机械直线行驶出现路径偏移时,通过系统计算,可以实时获取履带式农业机械的前进的距离,在已知信号丢失前的设备前进速度,以及两轮的差速,根据偏移路径经过调速系统实时控制两履带相差速度,以达到设备运行路径与规划路径相匹配。
2、为实现上述目的,本发明提供了如下方案:导航rtk信号丢失时的履带式农业机械导航方法,包括以下步骤:
3、s1、获取信号丢失前履带式农业机械的运行参数信息,并基于所述运行参数信息对履带式农业机械进行状态调整;
4、s2、履带式农业机械状态调整t时间后,计算运行偏移量;并基于所述偏移量调整履带式农业机械航向信息,直到履带式农业机械回到原始规划路线,完成导航。
5、进一步优选地,s1包括:
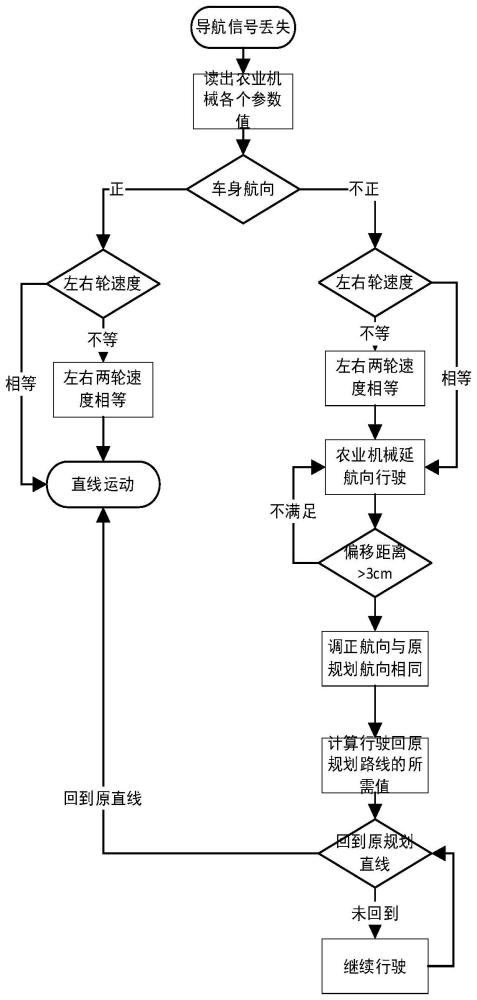
6、s11、获取所述运行参数信息,并基于所述运行参数信息判断车身航向;
7、s12、车身航向没有发生偏移时,调整左右轮速度相等,保持原始规划路线运行;
8、s13、车身航向发生偏移时,调整左右轮速度相等,沿当前航向行驶。
9、进一步优选地,s2包括:
10、s21、计算所述运行偏移量,当所述运行偏移量大于预设值时,计算驶回原始规划路线的行驶参数,基于所述行驶参数,回到原始规划路线;
11、s22、当所述偏移量小于预设值时,沿当前航向行驶,重复s21。
12、进一步优选地,s21包括:
13、s211、所述运行偏移量大于预设值时,计算履带式农业机械驶回原规划路线需要行驶的圆弧半径;
14、s212、计算履带式农业机械驶回原规划路线左右两轮的线速度,并基于所述线速度计算左右两轮的差速;
15、s213、计算履带式农业机械驶回原规划路径需要行驶的时间,对左右两轮的所述差速实时计算、调整,实现车身回到原始规划路线。
16、进一步优选地,调整所述差速的方法包括:
17、
18、式中,h表示实时偏移距离;s表示总路程长;s1表示行驶的直线路程;v表示履带式农业机械行驶速度;θ表示车身航向与原始规划路径直线的相夹角度;b、c、d均为常数系数;e表示自然常数;d表示偏移量;δv表示差速。
19、本发明还提供一种导航rtk信号丢失时的履带式农业机械导航系统,所述系统用于应用上述方法,包括:获取模块以及计算模块;
20、所述获取模块用于获取信号丢失前履带式农业机械的运行参数信息,并基于所述运行参数信息对履带式农业机械进行状态调整;
21、所述计算模块用于在履带式农业机械状态调整t时间后,计算运行偏移量;并基于所述偏移量调整履带式农业机械航向信息,直到履带式农业机械回到原始规划路线,完成导航。
22、进一步优选地,所述获取模块包括:采集单元、判断单元以及调整单元;
23、所述采集单元用于获取所述运行参数信息;
24、所述判断单元用于基于所述运行参数信息判断车身航向;
25、所述调整单元用于在车身航向没有发生偏移时,调整左右轮速度相等,保持原始规划路线运行;在车身航向发生偏移时,调整左右轮速度相等,沿当前航向行驶。
26、进一步优选地,所述计算模块包括:第一计算单元和第二计算单元;
27、所述第一计算单元用于计算所述运行偏移量,并对所述运行偏移量与预设值进行大小比较;
28、所述第二计算单元用于在所述运行偏移量大于预设值时,计算驶回原始规划路线的行驶参数,基于所述行驶参数,回到原始规划路线。
29、进一步优选地,所述第二计算单元包括:半径计算子单元、差速计算子单元以及差速调整子单元;
30、所述半径计算子单元用于在所述运行偏移量大于预设值时,计算履带式农业机械驶回原规划路线需要行驶的圆弧半径;
31、所述差速计算子单元用于计算履带式农业机械驶回原规划路线左右两轮的线速度,并基于所述线速度计算左右两轮的差速;
32、所述差速调整子单元用于计算履带式农业机械驶回原规划路径需要行驶的时间,对左右两轮的所述差速实时计算、调整,实现车身回到原始规划路线。
33、进一步优选地,调整所述差速的方法包括:
34、
35、式中,h表示实时偏移距离;s表示总路程长;s1表示行驶的直线路程;v表示履带式农业机械行驶速度;θ表示车身航向与原始规划路径直线的相夹角度;b、c、d均为常数系数;e表示自然常数;d表示偏移量;δv表示差速。
36、与现有技术相比,本发明的有益效果为:
37、本发明能够在农业机械信号丢失后,使其运行路径与规划路径相匹配,改善农业机械规模作业时出现信号丢失而出现的偏离作业,防止地区规模种植出现问题。
技术特征:
1.导航rtk信号丢失时的履带式农业机械导航方法,其特征在于,包括以下步骤:
2.根据权利要求1所述导航rtk信号丢失时的履带式农业机械导航方法,其特征在于,s1包括:
3.根据权利要求1所述导航rtk信号丢失时的履带式农业机械导航方法,其特征在于,s2包括:
4.根据权利要求3所述导航rtk信号丢失时的履带式农业机械导航方法,其特征在于,s21包括:
5.根据权利要求4所述导航rtk信号丢失时的履带式农业机械导航方法,其特征在于,调整所述差速的方法包括:
6.导航rtk信号丢失时的履带式农业机械导航系统,所述系统用于应用权利要求1-5任一项所述方法,其特征在于,包括:获取模块以及计算模块;
7.根据权利要求6所述导航rtk信号丢失时的履带式农业机械导航系统,其特征在于,所述获取模块包括:采集单元、判断单元以及调整单元;
8.根据权利要求6所述导航rtk信号丢失时的履带式农业机械导航系统,其特征在于,所述计算模块包括:第一计算单元和第二计算单元;
9.根据权利要求8所述导航rtk信号丢失时的履带式农业机械导航系统,其特征在于,所述第二计算单元包括:半径计算子单元、差速计算子单元以及差速调整子单元;
10.根据权利要求9所述导航rtk信号丢失时的履带式农业机械导航系统,其特征在于,调整所述差速的方法包括:
技术总结
本发明公开了导航RTK信号丢失时的履带式农业机械导航方法及系统,属于车辆导航技术领域。方法包括以下步骤:S1、获取信号丢失前履带式农业机械的运行参数信息,并基于所述运行参数信息对履带式农业机械进行状态调整;S2、履带式农业机械状态调整t时间后,计算运行偏移量;并基于所述偏移量调整履带式农业机械航向信息,直到履带式农业机械回到原始规划路线,完成导航。本发明能够在农业机械信号丢失后,使其运行路径与规划路径相匹配,改善农业机械规模作业时出现信号丢失而出现的偏离作业,防止地区规模种植出现问题。
技术研发人员:张健,杨然兵,邵珠和,李耀,吕士亭,赵昂
受保护的技术使用者:海南大学
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!