一种风电场升压站机器人巡检全局路径规划方法与流程
本发明涉及机器人巡检,具体涉及一种风电场升压站机器人巡检全局路径规划方法。
背景技术:
1、近年来,随着风能发电规模的不断扩大,风电场数量急剧增加,导致风电场升压站的运行和安全管理难度增大。风电场运行环境复杂,运维难度较大,为确保风力发电系统的安全稳定运行,风电场升压站的巡检工作尤为重要。
2、传统风电场升压站巡检主要依赖人工巡检方式,需要专业技术人员定期进行巡视、检修和维护。然而,这种人力巡检方式存在大量问题。首先,风电场升压站常分布于偏远地区,交通不便,人员调动困难;其次,人工巡检难以覆盖到每一个设备细节,容易忽略潜在问题;最后,巡检工作环境有风力发电机组旋转叶片产生的噪音、高温、高压等安全风险。
3、为了提高风电场升压站的运维效率和安全性,机器人巡检应运而生。机器人巡检是指利用自动化机器人设备对风电场升压站进行巡视、检测和监控的一种技术手段。其主要基于机器视觉、传感器技术、智能算法等,可以实现对升压站各个设备和系统的全方位巡检和监控。机器人巡检对比传统人工巡检具有以下一些优势:(1)减少人工风险:机器人巡检可以避免人员涉及高压和危险环境的风险,减少了巡检人员的伤亡和事故概率;(2)提高巡检效率:机器人可以全天候、全天时进行巡检,快速覆盖到每一个设备细节,减少了人力巡检所需的时间和工作量;(3)精准检测和数据采集:机器人搭载传感器和摄像头,通过计算机视觉和智能算法进行设备的异常检测和故障预警,同时能够及时采集、传输和分析巡检数据(4)降低维护成本:机器人巡检可以减少不必要的人力资源消耗和巡检设备的维护成本。
4、路径规划是巡检机器人正常工作的关键,筹算可行路径也是机器人执行各类任务的前提。风电场升压站空间狭小,布线环境复杂,使得机器人对路径规划算法的性能要求更高。相关学者提出融合几何修正的改进蚁群全局路径规划算法,对算法的信息素挥发策略进行改进,使用几何修正方案对算法生成的初始路径进行局部优化,得到更为平滑、收敛速度更快的全局路径。蚁群算法的一些参数取值不同对算法的收敛性和收敛时间都有不同的影响。在规划巡检机器人的全局路径时,针对不同巡检任务,所检查的设备是不同的,需要巡检的节点随着巡检任务的变化而不断变化。此时仅依靠一组经验值,无法在风电场升压站复杂运行环境中得到全局路径最优解。
5、基于此,有必要对风电场升压站机器人巡检路径规划方法作进一步的优化改进。
技术实现思路
1、本发明的目的在于提供一种风电场升压站机器人巡检全局路径规划方法,该方法有利于在风电场升压站复杂运行环境下快速、有效地获得机器人最优巡检路径。
2、为了实现上述目的,本发明采用的技术方案是:一种风电场升压站机器人巡检全局路径规划方法,包括以下步骤:
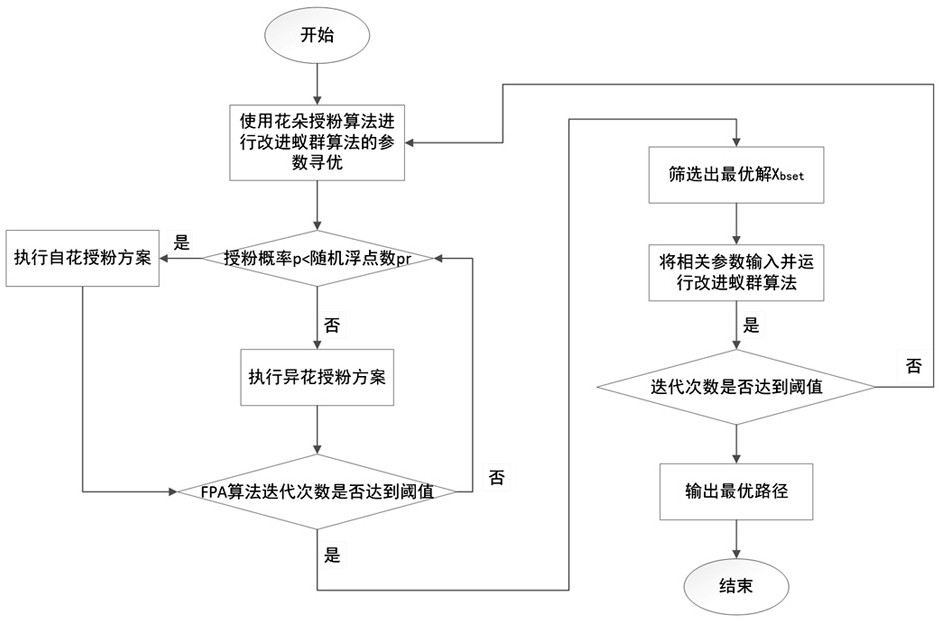
3、s1、采用花朵授粉算法对改进蚁群算法的参数进行寻优,根据相应巡检任务寻找出适应当前环境的信息素重要程度因子 α、启发函数重要程度因子 β和表示信息素随迭代次数不断消失的挥发因子 ρ;
4、s2、对改进蚁群算法的相关参数进行赋值;改进蚁群算法的相关参数中包括蚂蚁总数 m、迭代次数的阈值 n、信息素重要程度因子 α、启发函数重要程度因子 β和挥发因子 ρ,其中 α、 β、 ρ由花朵授粉算法的参数寻优过程中得到相应值;
5、s3、采用改进蚁群算法进行迭代;
6、s4、将每次迭代过程中 m只蚂蚁寻找到的成本最小的路径作为当前最优路径,并将其放入最优巡检路径集合中;
7、s5、更新最优巡检路径集合中各支路的信息素浓度;
8、s6、计算各支路在本次生成最优路径上的贡献比例;
9、s7、判断迭代次数是否达到阈值,是则得到全局最优解,输出最优巡检路径,否则返回步骤s1重新使用花朵授粉算法对改进蚁群算法的参数进行寻优。
10、进一步地,步骤s1中,采用花朵授粉算法进行参数寻优的具体实现方法包括:
11、1)将每个可行解视为一组花粉;初始化时,定义一个集合 r用于存放可行解,其中第 i个可行解表示为向量 x i= ( x i1, x i2, ..., x ir, ..., x il),式中 x ir为第 i个可行解的 r维数值, r=1,..., l, l为可行解的最大维数;
12、2)判断授粉概率 p是否小于随机浮点数 pr,是则执行自花授粉,否则执行异花授粉;
13、3)判断是否迭代终止条件,是则筛选出最优解,输出最优参数,否则返回步骤2)继续迭代。
14、进一步地,自花授粉的更新公式如式(1)所示:
15、 (1)
16、式中,、分别表示第 z次、第 z+1次的可行解;、分别表示集合中不同于可行解的两个变异可行解; ε为随机生成的[0, 1]范围内的随机数;
17、异花授粉的更新公式如式(2)所示:
18、 (2)
19、式中, x best表示集合中的当前最优解; l为调节变量。
20、进一步地,步骤s3中,在每次迭代历程中,将 m只蚂蚁随机放在需要访问的节点上,通过式(3)选择蚂蚁下一步前进的方向,当蚂蚁访问完所有节点后,再返回起点,从而构成一条完整的回路;
21、 (3)
22、 (4)
23、式中,表示在时间 t时蚂蚁 k从节点 i向节点 j前进的概率; τ ij( t)表示在时间 t时连接节点 ij的路径上的信息素浓度; η ij( t)表示在时间 t时蚂蚁从节点 i到节点 j的期望程度; allow k表示蚂蚁 k还需要访问的节点集合; s表示一节点, τ is( t)表示在时间 t时连接节点 is的路径上的信息素浓度; η is( t)表示在时间 t时蚂蚁从节点 i到节点 s的期望程度; d ij表示蚂蚁从节点 i到节点 j的路径长度; d is表示蚂蚁从节点 i到节点 s的路径长度。
24、进一步地,步骤s4中,通过式(5)计算蚂蚁生成路径的成本,选取成本最低的路径作为本次迭代的最优路径;
25、 (5)
26、式中, c为所形成回路的路径成本,即蚂蚁从初始节点出发,遍历所有节点后返回初始节点所形成的回路;为从节点1到节点 n-1的总路径成本, n为节点数,为从节点 n到节点1,即从最后访问的节点到初始节点的路径成本;其中,采用二维欧式距离公式计算,,其中 x i、 y i为节点i的坐标, x j、 y j为节点 j的坐标。
27、进一步地,步骤s5中,当完成一次迭代,并得出此次迭代的最优路径后,通过式(6)-(8)更新最优路径集合中各支路的信息素浓度;
28、 (6)
29、 (7)
30、 (8)
31、式中, τ ij( t)表示在时间 t时连接节点 ij的路径上的信息素浓度; τ ij( t+1)表示在时间 t+1时连接节点 ij的路径上的信息素浓度; n为节点数;为连接节点 ij的支路上信息素浓度的总和;为蚂蚁 k在连接节点 ij的支路上留下的信息素浓度; q为蚂蚁每次寻路所携带的信息素; l k为蚂蚁 k在此次迭代中所走过路径的总长。
32、进一步地,步骤s6中,通过式(9)计算各支路在本次生成最优路径上的贡献比例;对于贡献比例超过阈值的支路,采用式(10)、(11)再次增加信息素;
33、 (9)
34、 (10)
35、 (11)
36、式中, pc ij为支路 ij的长度占蚂蚁 k生成路径长度的百分比, d( i, j)为支路 ij的长度, l k( t)为第 k只蚂蚁在迭代次数为 t时所形成回路的长度, q为信息素浓度, τ ij( t+1)为当前信息素浓度,δ τ ij( again)为支路 ij再次增加的信息素含量, q0为判断信息素是否需要再次更新的阈值, τ ij( t)表示在时间 t时连接节点 ij的路径上的信息素浓度, τ ij( t+1)表示在时间 t+1时连接节点 ij的路径上的信息素浓度。
37、与现有技术相比,本发明具有以下有益效果:本发明使用花朵授粉算法进行蚁群算法迭代前的参数寻优,针对风电场升压站复杂运行环境以及不同的巡检任务选取合适参数,再将参数输入到改进蚁群算法中迭代得到最优巡检全局路径。本发明结合了花朵授粉算法与蚁群算法,极大提高了算法收敛度和适应度,能够在风电场升压站复杂运行环境下快速、有效地获得机器人最优巡检路径,具有很强的实用性和广阔的应用前景。
- 还没有人留言评论。精彩留言会获得点赞!