一种基于加权最小二乘的层析SAR无网格三维反演方法
本发明属于雷达成像和信号处理,具体涉及一种基于加权最小二乘的层析sar无网格三维反演方法。
背景技术:
1、二维合成孔径雷达(synthetic aperture radar, sar)成像技术通过在距离向发射大带宽信号实现距离维分辨,在方位向移动形成合成孔径实现方位向分辨,但不具备第三维度的分辨能力,地物在第三维度上的后向散射系数分布会积分到二维的方位-距离平面上。层析sar通过在跨航向增加观测位置,应用谱分析和压缩感知等反演算法可以进行第三维度的分辨。层析sar在城市测绘、灾害评估等方面有重要应用。
2、现有的反演算法一般存在这样的问题:有网格的反演算法为了提高处理效率,不会设置很高的网格数,所以通常精度比较差,比如正交匹配追踪(orthogonal matchpursuit, omp)算法;无网格的反演算法为了提高处理精度,会建立一个优化模型然后对其求解,受限于优化求解算法,通常处理效率比较低;并且没有反演算法可以提供散射点位置和散射点后向散射系数的解析式。针对处理精度差、处理效率低和没有解析式的问题,本发明旨在寻找散射点位置和散射点后向散射系数的解析式,提高反演处理的精度和效率。
技术实现思路
1、为解决上述技术问题,本发明提供一种基于加权最小二乘的层析sar无网格三维反演方法,以获取散射点位置和散射点后向散射系数的解析式,解析式一方面可以提高反演的效率、获得无网格的反演精度,另一方面可以为其他需要散射点位置解析式的算法或处理框架提供支撑。
2、为了达到上述目的,本发明提出如下技术方案:
3、一种基于加权最小二乘的层析sar无网格三维反演,包括如下步骤:
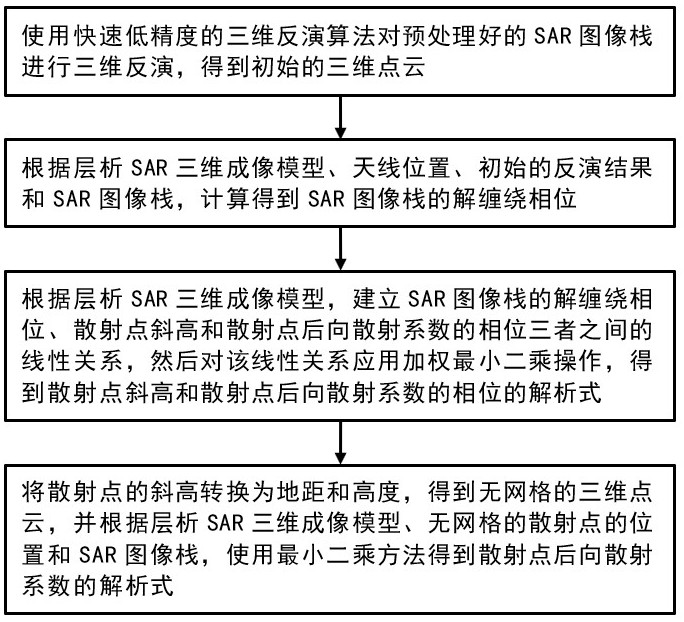
4、步骤1、使用现有的快速低精度的三维反演算法,比如正交匹配追踪(orthogonalmatching pursuit,omp)反演算法,对预处理好的sar图像栈进行三维反演,得到初始的三维点云;
5、步骤2、根据层析sar三维成像模型、天线位置、初始的反演结果和sar图像栈,计算得到sar图像栈的解缠绕相位;
6、步骤3、根据层析sar三维成像模型,建立sar图像栈的解缠绕相位、散射点斜高和散射点后向散射系数的相位三者之间的线性关系,然后对该线性关系应用加权最小二乘操作,得到散射点斜高和散射点后向散射系数的相位的解析式;
7、步骤4、将散射点的斜高转换为地距和高度,得到无网格的三维点云,并根据层析sar三维成像模型、无网格的散射点的位置和sar图像栈,使用最小二乘方法得到散射点后向散射系数的解析式。
8、本发明的有益效果:
9、为了得到散射点位置的解析式,提高反演效率,获得无网格的反演精度,本发明通过低精度的预反演获取了sar图像栈的解缠绕相位,找到了散射点斜高和sar图像栈的解缠绕相位之间的线性关系。根据各天线获取的sar图像的信噪比差异构建加权矩阵,先使用加权最小二乘方法得到了散射点斜高和散射点后向散射系数的相位解析式,再根据三维成像平面波模型到三维成像球面波模型之间的转换关系,将散射点斜高转换到下视角,进而转换到地距-高度坐标系。有了散射点的位置,根据三维成像球面波模型就能得到散射点对应的导向矢量,然后根据观测向量和导向矢量,使用最小二乘方法获得散射点的后向散射系数,至此可以得到散射点斜高和散射点后向散射系数的解析式。将成像参数和预反演的结果带入该解析式,可以直接得到散射点的无网格位置和后向散射系数,大大地提高了处理效率和处理精度。并且散射点斜高和散射点后向散射系数的解析式可以为需要求导的处理框架提供理论基础,比如神经网络。
技术特征:
1.一种基于加权最小二乘的层析sar无网格三维反演方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于加权最小二乘的层析sar无网格三维反演方法,其特征在于,所述步骤1包括:
3.根据权利要求1所述的一种基于加权最小二乘的层析sar无网格三维反演方法,其特征在于,所述步骤2包括:
4.根据权利要求1所述的一种基于加权最小二乘的层析sar无网格三维反演方法,其特征在于,所述步骤3包括:
5.根据权利要求1所述的一种基于加权最小二乘的层析sar无网格三维反演方法,其特征在于,所述步骤4包括:
技术总结
本发明公开了一种基于加权最小二乘的层析SAR无网格三维反演方法,涉及雷达成像和信号处理技术领域。所述方法包括:对预处理后的SAR图像栈进行粗网格三维反演;根据反演结果得到SAR图像栈的解缠绕相位;根据三维成像平面波模型,构建出SAR图像栈的解缠绕相位、散射点斜高和散射点后向散射系数的相位三者之间的线性关系,并使用幅度加权相位最小二乘方法对其求解;根据三维成像平面波模型和三维成像球面波模型之间的转换关系,对散射点的位置进行修正,得到最终的点云。该方法给出了散射点斜高和散射点后向散射系数的解析式,提升了层析SAR三维反演的处理效率和处理精度。
技术研发人员:焦泽坤,颜千程,仇晓兰,汪丙南,丁赤飚
受保护的技术使用者:中国科学院空天信息创新研究院
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!