一种桥梁用现浇箱梁钢筋施工间距偏差检测系统及方法与流程
本技术涉及路桥钢筋偏差检测,更具体地说,涉及桥梁用现浇箱梁钢筋施工间距偏差检测系统及方法。
背景技术:
1、现浇箱梁在桥梁工程建设方面起着极其重要的作用,虽然现浇箱梁施工看似简单,但在实际操作中需要严格的监控技术操作,否则将会影响项目工程的安全与进度。
2、箱梁分为单箱和多箱等,内部呈现空心状,上部有两个翼缘,形状似箱子,现浇箱梁大部分都属于跨连续结构,多在大型连续桥梁中应用,多一次性整体浇筑,用来提高桥梁的受力能力和刚度。桥梁项目中现浇箱梁时需要对钢筋的铺设进行检查,检测钢筋铺设的间距偏差和钢筋直径,确保箱梁浇筑后的强度和质量。
3、现有技术公开号为cn212512779u的文献提供一种桥梁用现浇箱梁钢筋施工偏差检测装置,包括手持板,所述手持板的顶部固定安装有第一固定板,第一固定板的一侧开设有顶部为开口的滑动槽,滑动槽内滑动安装有标尺,标尺的一端开设有限位槽。该实用新型结构简单,操作方便,能够快速方便的对标尺进行伸长和固定,从而可以更方便的对高处的钢筋施工进行检测,所以满足了人们的需求。可以及时的发现施工过程中工程队偷偷增加钢筋间隔实现减少用料的问题。
4、上述中的现有技术方案虽然通过现有技术的结构可以实现有关的有益效果,但是仍存在以下缺陷。
5、1、需要人工拿持检装置进行检查,费时费力,工作效率低。
6、2、不能及时的对钢筋间距偏差超出允许范围的位置进行记录,不便于后期工作人员快速的找到钢筋间距偏差超出允许范围的位置,不利于快速的整改。
7、鉴于此,我们提出桥梁用现浇箱梁钢筋施工间距偏差检测系统及方法。
技术实现思路
1、1.要解决的技术问题。
2、本技术的目的在于提供桥梁用现浇箱梁钢筋施工间距偏差检测系统及方法,解决了上述背景技术中提出的技术问题,实现了自动快速的对桥梁现浇箱梁钢筋间距偏差进行检测,当发现有钢筋间距偏差超出允许偏差时,发出警报并自动记录钢筋间距偏差超出允许偏差的位置,可以及时发现钢筋直径小于额定尺寸的问题,发出警报并记录位置,便于工作人员后面快速的找到钢筋直径不合格的位置进行整改的技术效果。
3、2.技术方案。
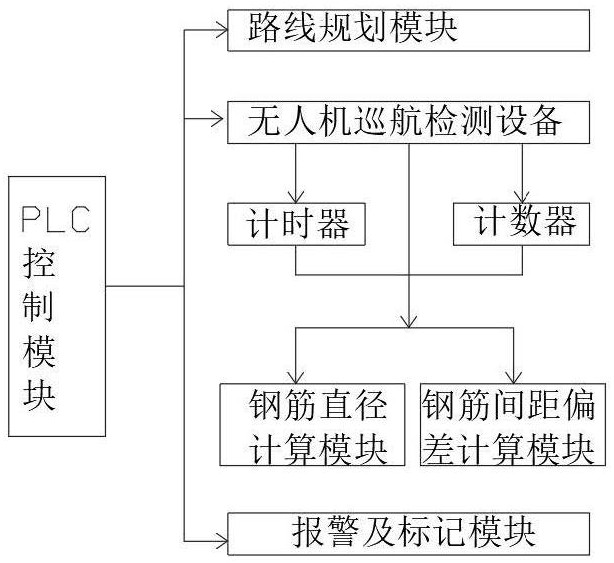
4、本技术技术方案提供了桥梁用现浇箱梁钢筋施工间距偏差检测系统包含。
5、无人机巡航检测设备,包括无人机和红外线探测器,可以对现浇箱梁钢筋施工间距和偏差进行巡航检测。
6、路线规划模块,对无人机的飞行路线进行规划,无人机的飞行路线与需要测量间距偏差的钢筋相对垂直。
7、计时器,用于巡航检测计时。
8、计数器,用于对巡航检测的检测点进行计数。
9、钢筋直径计算模块,根据无人机飞行的速度、飞行时间和计数器的计数对钢筋直径进行计算。
10、钢筋间距偏差计算模块,根据无人机飞行的速度、飞行时间和计数器的计数对钢筋间距偏差进行计算。
11、报警及标记模块,包括报警器和位置记录模块,当检测到钢筋直径小于规定尺寸或钢筋间距超出允许偏差时,报警器发出警报;同时无人机巡航检测设备对钢筋直径小于规定尺寸或钢筋间距超出允许偏差处喷洒橘黄色粉末进行标记,便于工作人员快速的找到该位置进行整改。同时位置记录模块记录钢筋直径小于规定尺寸或钢筋间距超出允许偏差处的位置数据。
12、plc控制模块,与报警及标记模块、路线规划模块、计时器、计数器和无人机巡航检测设备网络连接。
13、通过上述技术方案中,通过路线规划模块对无人机的飞行路线进行规划,避开障碍物;无人机巡航检测设备按照规划好的路线进行巡航检测;通过红外线探测器检测钢筋的位置;通过计时器对巡航检测进行计时。通过计数器对巡航检测的检测点进行计数。然后通过钢筋直径计算模块对钢筋的直径进行计算,通过钢筋间距偏差计算模块对钢筋间距偏差进行计算。当检测到钢筋直径小于规定尺寸或钢筋间距超出允许偏差时,报警器发出警报;同时无人机巡航检测设备对钢筋直径小于规定尺寸或钢筋间距超出允许偏差处喷洒橘黄色粉末进行标记,便于工作人员快速的找到该位置进行整改。
14、作为本发明一种可选方案,所述计数器在对巡航检测的检测点进行计数时,将红外线探测器发出的红外线与钢筋接触或脱离的点作为检测点;将第一个钢筋外侧一个边作为起点,当红外线探测器发出的红外线开始接触钢筋,计数为“1”,开始计时,当红外线探测器发出的红外线脱离钢筋时,计数为“2”,记录时间,当红外线探测器发出的红外线接触到下一个钢筋时,计数为“3”,记录时间,当红外线探测器发出的红外线脱离钢筋时,计数为“4”,记录时间,依此类推,完成巡航检测的计时和计数。
15、作为本发明一种可选方案,所述钢筋直径计算模块根据无人机飞行的速度、飞行时间和计数器的计数对钢筋直径进行计算,钢筋直径d计算公式如下。
16、di=(tn-tn-1)×v。
17、i=n/2。
18、式中,di为从起点开始数第i个钢筋的直径。v为无人机的飞行速度,tn为计数为n时无人机飞行的时间,tn-1为计数为n-1时无人机飞行的时间;n为计数器的计数,在对钢筋直径检测时n取偶数。
19、作为本发明一种可选方案,所述钢筋间距偏差计算模块根据无人机飞行的速度、飞行时间和计数器的计数对钢筋间距偏差进行计算。钢筋间距偏差c的计算公式如下。
20、li=(tn-tn-2)×v。
21、ci=|(tn-tn-2)×v-l额|。
22、i=n/2。
23、n≥4。
24、式中,li为从起点开始数第i个钢筋和第i-1个钢筋之间间距;ci为从起点开始数第i个钢筋和第i-1个钢筋之间间距的偏差,即从起点开始数第i个钢筋和第i-1个钢筋间距与钢筋额定间距的差。v为无人机的飞行速度,tn为计数为n时无人机飞行的时间,tn-2为计数为n-2时无人机飞行的时间;n为计数器的计数,n取偶数。
25、钢筋的总数量计算公式为:n=[max(n)]/2。
26、式中,n为钢筋的总数量,max(n)为钢筋检测点计数的最大值,n为偶数。
27、作为本发明一种可选方案,所述报警及标记模块中,位置记录模块采用下列公式对钢筋的直径和钢筋间距偏差与额定的标志进行比较。
28、g(i)={(1,di<d额);(0,di≥d额)}。
29、e(i)={(1,ci>c额);(0,ci≤c额)}。
30、式中,di为从起点开始数第i个钢筋的直径。d额为设计额定使用的钢筋直径。ci为从起点开始数第i个钢筋和第i-1个钢筋之间间距的偏差,c额为允许的钢筋间距偏差。
31、位置记录模块采用下列公式计算钢筋直径小于规定尺寸或钢筋间距超出允许偏差处的位置。
32、hi=tn×v。
33、i=n/2。
34、式中,hi为从起点开始数第i个钢筋距起点的距离,即第i个钢筋的位置。v为无人机的飞行速度,tn为计数为n时无人机飞行的时间;n为计数器的计数,n取偶数。
35、当位置记录模块检测的g(i)或e(i)的输出为“1”时,报警器发出警报;同时无人机巡航检测设备对钢筋直径小于规定尺寸或钢筋间距超出允许偏差处喷洒橘黄色粉末进行标记,同时位置记录模块记录钢筋直径小于规定尺寸或钢筋间距超出允许偏差处的位置数据,便于工作人员快速的找到该位置进行整改。
36、无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。机上无驾驶舱,但安装有自动驾驶仪、程序控制装置等设备。遥控人员可通过雷达遥控器等设备,对其进行跟踪、定位、遥控、遥测和数字传输。可在无线电遥控下像普通飞机一样飞行。此为现有技术,在此不赘述。
37、作为本发明一种可选方案,所述路线规划模块对无人机的飞行路线进行规划的同时,规划无人机的飞行高度,将无人机控制在合适的飞行高度,需要避开障碍物。使无人机在沿规划好的路线飞行过程中,不会碰到任何的障碍物,确保检测的顺利进行,无人机保持匀速飞行。
38、作为本发明一种可选方案,所述无人机巡航检测设备包括无人机和红外线探测器。
39、无人机的前部下端固定设置有红外线探测器,可通过红外线探测器对钢筋进行检测。
40、红外线探测器为红外线反射传感器。
41、通过上述技术方案,无人机巡航检测设备按照规划好的路线进行飞行检测,通过红外线探测器探测钢筋的位置。
42、作为本发明一种可选方案,所述无人机的下方固定设置有储存箱和抽吸泵。
43、储存箱内装有橘黄色粉末,抽吸泵的输入端与储存箱内壁连通,抽吸泵的输出端固定设置有喷管。
44、根据无人机的飞行高度来调整喷管的倾斜角度,喷管角度调整的公式为。
45、a=arcsin{[h0v-gl02/(2v)]/[v1(l0-d0/2)]}。
46、式中,a为喷管与无人机机身的夹角;h0为预定的红外线探测器和钢筋上端的距离;v为无人机匀速飞行的速度,v1为储存箱内粉末喷出后的速度,g为重力加速度,l0为抽吸泵与红外线探测器直径的距离;d0为额定使用的钢筋直径。
47、无人机上固定设置有电机,电机的输出端与抽吸泵固定连接。
48、通过上述技术方案,启动电机带动抽吸泵转动,可调整喷管的角度,从而调整喷管喷粉的角度,使调整喷管喷出的粉落到需要标记的钢筋上。
49、本发明提供一种桥梁用现浇箱梁钢筋施工间距偏差检测方法,包括以下步骤。
50、s1、路线规划模块对无人机的飞行路线进行规划,飞行路线避开障碍物。
51、s2、将无人机巡航检测设备放到需要检测的起点位置,使无人机升到预定高度,使红外线探测器发出的红外线与起点处钢筋外侧对齐;此时,计数器计数为“1”。
52、s3、无人机巡航检测设备开始按照规划好的路线进行飞行检测;计时器开始计时。计数器在对巡航检测的检测点进行计数时,将红外线探测器发出的红外线与钢筋接触或脱离的点作为检测点;将第一个钢筋外侧一个边作为起点,当红外线探测器发出的红外线开始接触钢筋,计数为“1”,开始计时,当红外线探测器发出的红外线脱离钢筋时,计数为“2”,记录时间,当红外线探测器发出的红外线接触到下一个钢筋时,计数为“3”,记录时间,当红外线探测器发出的红外线脱离钢筋时,计数为“4”,记录时间,依此类推,完成巡航检测的计时和计数。
53、s4、同时,钢筋直径计算模块根据无人机飞行的速度、飞行时间和计数器的计数对钢筋直径进行计算。
54、s5、同时,钢筋间距偏差计算模块根据无人机飞行的速度、飞行时间和计数器的计数对钢筋间距偏差进行计算。
55、s6、当检测到钢筋直径小于规定尺寸或钢筋间距超出允许偏差时,报警器发出警报;同时位置记录模块记录钢筋直径小于规定尺寸或钢筋间距超出允许偏差处的位置数据。
56、3.有益效果。
57、本技术技术方案中提供的一个或多个技术方案,至少具有如下技术效果或优点。
58、1、本发明可以自动快速的对桥梁现浇箱梁钢筋间距偏差进行检测,当发现有钢筋间距偏差超出允许偏差时,发出警报并自动记录钢筋间距偏差超出允许偏差的位置,提高工作效率,节省人力物力,减轻工作人员的工作负担。
59、2、可以自动对钢筋的直径进行检测,及时发现钢筋直径小于额定尺寸的问题,发出警报并记录位置,便于工作人员后面快速的找到钢筋直径不合格的位置进行整改。
60、3、可以通过无人机巡航检测设备对钢筋间距偏差超出允许偏差或钢筋直径不合格的钢筋喷洒橘黄色粉末进行标记,便于工作人员后面快速的找到钢筋直径不合格的位置进行整改。可以自动计算出铺设的钢筋的数量。
- 还没有人留言评论。精彩留言会获得点赞!