一种基于雷达回波信号的目标模拟方法与流程
本发明涉及雷达,特别涉及一种基于雷达回波信号的目标模拟方法。
背景技术:
1、雷达技术在军事、航空、气象、航海、交通等领域中具有广泛的应用,用于探测和跟踪目标。其中,目标模拟技术是雷达领域的一个重要研究方向,它允许雷达系统模拟各种目标的回波信号,以便进行性能测试、培训和仿真研究。在过去的几十年里,目标模拟技术取得了显著的进展,但仍然面临一些挑战和限制。
2、在过去,静态目标模拟是一种常见的方法,通过固定的目标几何模型和静态参数来生成雷达回波信号。这种方法的优点是简单易实现,但缺点也显而易见:它无法模拟运动目标的动态效应,例如多普勒频移、运动模糊等。因此,在需要模拟动态目标时,静态目标模拟方法不再适用。
3、为了模拟动态目标,现有技术引入了动态参数,如目标的速度、加速度等。这些参数允许生成具有一定动态效应的回波信号。然而,现有技术仍然存在一些问题:部分现有技术在模拟目标的速度和加速度时,未能考虑到雷达回波信号的影响。这可能导致模拟结果与实际情况不符,降低了模拟的精确性。运动目标在回波信号中引入了运动模糊效应,这是由于目标在雷达波束内的不同位置产生不同的回波信号。现有技术通常未能充分考虑运动模糊效应,因此在模拟中未能准确捕捉这种现象。现有技术中通常需要复杂的参数调整和试错过程,以获得满足需求的目标模拟结果。这增加了模拟过程的复杂性和成本。
技术实现思路
1、本发明的目的是提供一种基于雷达回波信号的目标模拟方法,通过对雷达目标的运动模型和几何模型进行精确调整,提高了目标模拟的逼真度,使其更全面地考虑了多种影响因素,具备实时性和高效性。
2、为解决上述技术问题,本发明提供一种基于雷达回波信号的目标模拟方法,所述方法包括:
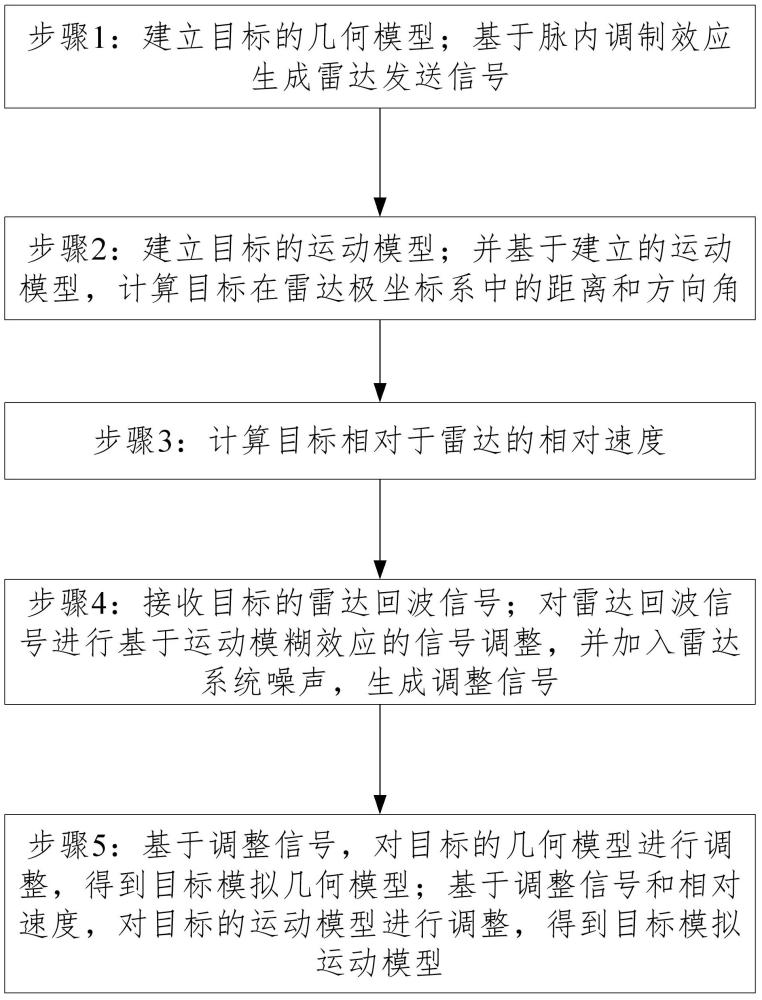
3、步骤1:建立目标的几何模型;基于脉内调制效应生成雷达发送信号;
4、步骤2:建立目标的运动模型;并基于建立的运动模型,计算目标在雷达极坐标系中的距离和方向角;
5、步骤3:计算目标相对于雷达的相对速度;
6、步骤4:接收目标的雷达回波信号;对雷达回波信号进行基于运动模糊效应的信号调整,并加入雷达系统噪声,生成调整信号;
7、步骤5:基于调整信号,对目标的几何模型进行调整,得到目标模拟几何模型;基于调整信号和相对速度,对目标的运动模型进行调整,得到目标模拟运动模型。
8、进一步的,所述步骤1中建立的目标的几何模型为圆柱模型;圆柱模型的底面半径为,高度为;以表示目标的中心坐标;圆柱模型的目标底面使用如下公式进行表示:
9、;
10、其中,为目标底面的x轴坐标值;为目标点里面的y轴坐标值;目标的高度使用如下公式进行表示:
11、;
12、其中,为圆柱侧面的z轴坐标值。
13、进一步的,所述步骤1中,基于脉内调制效应生成雷达发送信号时,通过在脉冲信号内部引入频率变化,使得不同部分的信号以不同的频率传输,使得雷达系统在接收时区分不同距离的目标或不同速度的目标;使用函数表示脉内调制的效果,函数是一种用于描述频率变化的函数,频率变化越大,函数的主瓣越宽;步骤1中生成的雷达发送信号使用如下公式进行表示:
14、;
15、其中,为雷达发送信号的振幅;为雷达发射功率;为雷达发射天线增益;为雷达接收天线增益;为雷达发送信号的波长;为目标的雷达散射截面;为雷达天线等效面积;为目标到雷达的距离;为时间;为雷达脉冲宽度;为脉内调制频率;为雷达发送信号的相位;为雷达发送信号的中心频率。
16、进一步的,所述步骤2中建立目标的运动模型,使用如下公式进行表示:
17、
18、其中,、和是目标在时间时的位置坐标;是z轴坐标,是x轴坐标,是y轴坐标;是目标在x轴方向的初始速度分量;是目标在y轴方向的初始速度分量;是目标在z轴方向的初始速度分量;是目标在x轴方向的加速度分量;是目标在y轴方向的加速度分量;是目标在z轴方向的加速度分量;设雷达的位置为;使用如下公式,基于建立的运动模型,计算目标在雷达极坐标系中的距离和方向角:
19、;
20、其中,为目标于时间在雷达极坐标系中的距离;为目标于时间在雷达极坐标系中的方向角;为目标在雷达发送信号的传播方向上的偏移角度。
21、进一步的,步骤3中,使用如下公式,计算目标相对于雷达的相对速度:
22、;
23、其中,为目标相对于雷达的相对速度;为虚数单位。
24、进一步的,步骤4中,设接收目标的雷达回波信号的波形函数为;则雷达回波信号使用如下公式进行表示:
25、;
26、其中,为雷达回波信号。
27、进一步的,步骤4中,使用如下公式对雷达回波信号进行基于运动模糊效应的信号调整:
28、
29、其中,考虑运动模糊效应后的目标回波信号;为最大加速度引起的多普勒频移,表示了目标速度变化的上限,速度变化越大,频移效应越显著,决定了频谱扩展的程度;为积分变量,表示在积分过程中对时间的积分变量;是加速度引起的多普勒频移;通过如下公式,加入雷达系统噪声,生成:
30、
31、其中,为调整信号;表示了各种源头引起的随机干扰。
32、进一步的,步骤5中,通过如下公式,基于调整信号,对目标的几何模型进行调整,得到目标模拟几何模型:
33、;
34、其中,是调整尺寸的系数,取值范围为0.3到0.5;调整后的几何模型的高度;为调整后的目标的几何模型的底面半径;调整后的目标几何模型的中心坐标使用如下公式进行表示:
35、
36、其中,是调整系数,为设定值,取值范围为0.6到0.9;是的相位;为表示调整后的目标的几何模型的中心坐标。
37、进一步的,步骤5中,通过如下公式,基于调整信号和相对速度,对目标的运动模型进行调整,得到目标模拟运动模型:设目标的运动模型由位置向量描述,并且有相应的速度分量和加速度分量;调整后的运动模型表示为,其中:
38、;
39、其中,是位置调整系数,取值范围为0.4到0.7;是一个角频率参数,取值范围为300赫兹到700赫兹;是的相位;
40、;
41、其中,是速度调整系数,取值范围为0.6到0.9;
42、;
43、其中,是加速度调整系数,取值范围为0.3到0.6。
44、本发明的一种基于雷达回波信号的目标模拟方法,具有以下有益效果:本发明的一个重要效果是提高了目标模拟的逼真度。传统的目标模拟技术通常只能生成静态目标或简单动态目标的模拟结果,而本发明通过对目标的运动模型和几何模型进行实时调整,能够更准确地模拟目标的复杂运动和外形特征。这使得目标模拟更加真实,有助于更好地模拟实际雷达场景中的目标行为。本发明的另一个重要效果是考虑了多种影响因素对目标模拟的影响。通过引入多普勒频移、运动模糊、脉内调制等因素,本发明更全面地考虑了雷达回波信号的复杂特性。同时,通过噪声模拟,本发明还考虑了噪声对模拟结果的影响。这种综合考虑使得目标模拟更加全面和准确,更能反映实际雷达系统中的各种复杂情况。
- 还没有人留言评论。精彩留言会获得点赞!