稀疏孔径带微动部件目标结构化ISAR成像方法及装置
本申请涉及逆合成孔径雷达成像,特别是涉及一种稀疏孔径带微动部件目标结构化isar成像方法及装置。
背景技术:
1、逆合成孔径雷达(inverse synthetic aperture radar,isar)成像技术通过目标相对于固定雷达平台的运动合成孔径,可实现对运动目标的高分辨成像。然而,对于一些复杂的运动目标,往往在其自身结构的基础上增加了许多微动部件。例如:含有螺旋桨的飞机以及带有旋转天线的舰船何卫星等。对于这些带微动部件的目标而言,isar获取的雷达图像中将存在微多普勒干扰,导致微动部件所在的距离单元出现散焦。此外,在实际场景中,雷达接收到的回波由于不同通道之间的切换以及其它干扰因素的影响通常是不完整的,这种不完整的回波被称为稀疏孔径回波。在稀疏孔径下,受旁\栅瓣干扰等影响,雷达图像的质量将进一步降低,严重影响对isar图像中目标的判读。在稀疏孔径下,对于带微动部件的目标,旁\栅瓣干扰将与微多普勒干扰相互叠加,使得isar图像散焦变得更加严重。因此,如何获得稀疏孔径下带微动部件目标主体的高质量isar图像是一个重要挑战。
2、现有的isar成像方法在稀疏孔径下获取的带微动部件目标主体isar图像往往只能体现出一些强散射点,无法反映出目标主体的结构特征。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够有效提高isar成像质量的稀疏孔径带微动部件目标结构化isar成像方法及装置。
2、一种稀疏孔径带微动部件目标结构化isar成像方法,所述方法包括:
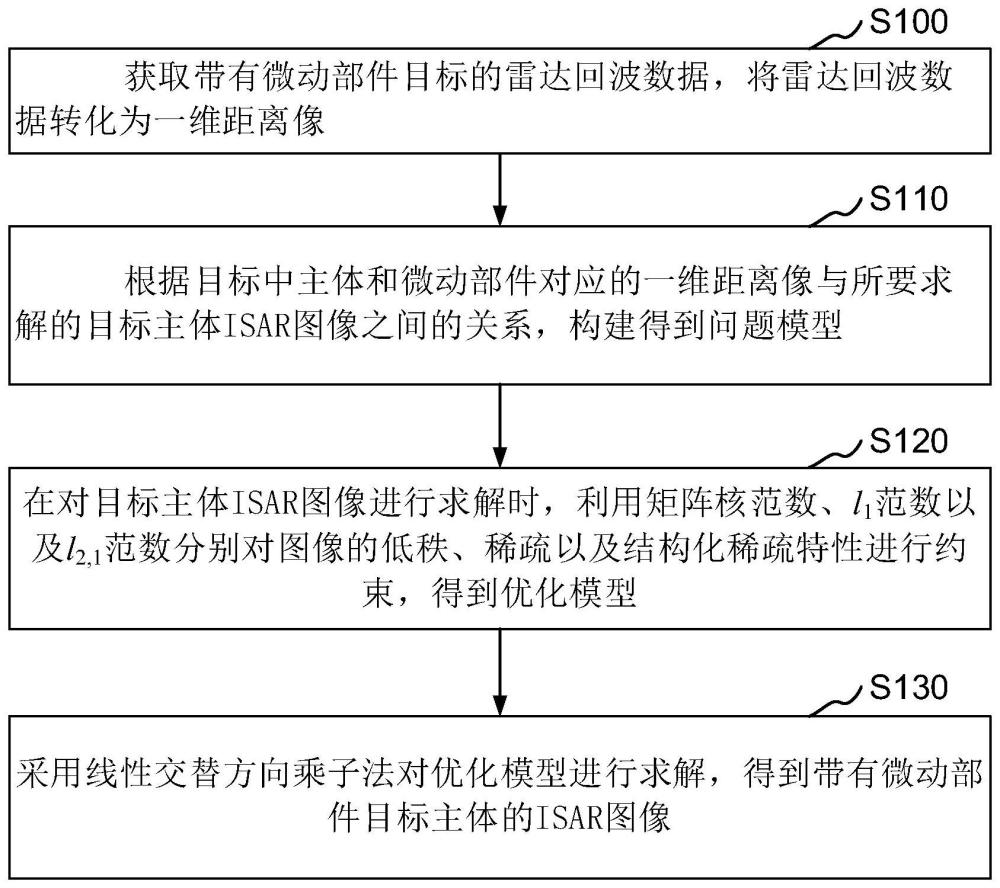
3、获取带有微动部件目标的雷达回波数据,将所述雷达回波数据转化为一维距离像;
4、根据目标中主体和微动部件对应的一维距离像与所要求解的目标主体isar图像之间的关系,构建得到问题模型;
5、在对所述目标主体isar图像进行求解时,利用矩阵核范数、l1范数以及l2,1范数分别对图像的低秩、稀疏以及结构化稀疏特性进行约束,得到优化模型;
6、采用线性交替方向乘子法对所述优化模型进行求解,得到带有微动部件目标主体的isar图像。
7、在其中一实施例中,根据所述一维距离像构建所述问题模型之前,还采用互相关法和最小熵法对所述一维距离像进行包络对齐和相位补偿,以实现平动补偿,得到补偿后的一维距离像。
8、在其中一实施例中,所述问题模型表示为:
9、h=l+s
10、l=px
11、在上式中,l、s、p、x分别表示主体一维距离像、微动部件一维距离像、傅里叶矩阵以及目标主体isar图像。
12、在其中一实施例中,所述优化模型表示为:
13、min||l||*+λs||1+μ||a(x)||2,1
14、s.t.h=l+s
15、l=px
16、在上式中,||·||*表示采用矩阵核范数对所述主体一维距离像低秩性的约束,||·||1表示采用矩阵l1范数对所述微动部件一维距离像稀疏性的约束,||·||2,1表示采用l2,1范数对所述目标主体isar图像结构化稀疏性的约束,λ、μ表示正则化参数,算子a(·)表示原始图像矩阵转换为标准结构化的稀疏矩阵。
17、在其中一实施例中,采用线性交替方向乘子法对所述优化模型进行求解时:
18、根据所述优化模型构建得到对应的增广拉格朗日函数;
19、根据所述增广拉格朗日函数将所述优化模型转化为对应的多个子问题的求解;
20、对所述多个子问题进行交替迭代求解,在每一次迭代过程中,根据所述增广拉格朗日函数对主体一维距离像、微动部件一维距离像、目标主体isar图像以及增广拉格朗日乘子进行更新。
21、在其中一实施例中,在对各所述子问题进行交替迭代求解时,还通过设置迭代次数或误差精度来控制迭代过程,从而得到最终的目标主体isar图像;
22、其中,当迭代回合数达到预设次数或误差精度达到预设值时,则当前回合迭代得到的目标主体isar图像为最终的所述带有微动部件目标主体的isar图像。
23、本申请还提供一种稀疏孔径带微动部件目标结构化isar成像装置,所述装置包括:
24、一维距离像获取模块,用于获取带有微动部件目标的雷达回波数据,将所述雷达回波数据转化为一维距离像;
25、问题模型构建模块,用于根据目标中主体和微动部件对应的一维距离像与所要求解的目标主体isar图像之间的关系,构建得到问题模型;
26、优化模型构建模块,用于在对所述目标主体isar图像进行求解时,利用矩阵核范数、l1范数以及l2,1范数分别对图像的低秩、稀疏以及结构化稀疏特性进行约束,得到优化模型;
27、优化模型求解模块,用于采用线性交替方向乘子法对所述优化模型进行求解,得到带有微动部件目标主体的isar图像。
28、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
29、获取带有微动部件目标的雷达回波数据,将所述雷达回波数据转化为一维距离像;
30、根据目标中主体和微动部件对应的一维距离像与所要求解的目标主体isar图像之间的关系,构建得到问题模型;
31、在对所述目标主体isar图像进行求解时,利用矩阵核范数、l1范数以及l2,1范数分别对图像的低秩、稀疏以及结构化稀疏特性进行约束,得到优化模型;
32、采用线性交替方向乘子法对所述优化模型进行求解,得到带有微动部件目标主体的isar图像。
33、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
34、获取带有微动部件目标的雷达回波数据,将所述雷达回波数据转化为一维距离像;
35、根据目标中主体和微动部件对应的一维距离像与所要求解的目标主体isar图像之间的关系,构建得到问题模型;
36、在对所述目标主体isar图像进行求解时,利用矩阵核范数、l1范数以及l2,1范数分别对图像的低秩、稀疏以及结构化稀疏特性进行约束,得到优化模型;
37、采用线性交替方向乘子法对所述优化模型进行求解,得到带有微动部件目标主体的isar图像。
38、上述稀疏孔径带微动部件目标结构化isar成像方法及装置,首先将带有微动部件目标的雷达回波数据转化为一维距离像,然后根据目标中主体和微动部件对应的一维距离像与所要求解的目标主体isar图像之间的关系,构建得到问题模型。在对目标主体isar图像进行求解时,利用矩阵核范数、l1范数以及l2,1范数分别对图像的低秩、稀疏以及结构化稀疏特性进行约束,得到优化模型。最后采用线性交替方向乘子法对所述优化模型进行求解,得到带有微动部件目标主体的isar图像。采用本方法可提升稀疏孔径下带微动部件目标主体isar图像的质量。
技术特征:
1.一种稀疏孔径带微动部件目标结构化isar成像方法,其特征在于,所述方法包括:
2.根据权利要求1所述的稀疏孔径带微动部件目标结构化isar成像方法,其特征在于,在根据所述一维距离像构建问题模型之前,还采用互相关法和最小熵法对所述一维距离像进行包络对齐和相位补偿,以实现平动补偿,得到补偿后的一维距离像。
3.根据权利要求2所述的稀疏孔径带微动部件目标结构化isar成像方法,其特征在于,所述问题模型表示为:
4.根据权利要求3所述的稀疏孔径带微动部件目标结构化isar成像方法,其特征在于,所述优化模型表示为:
5.根据权利要求4所述的稀疏孔径带微动部件目标结构化isar成像方法,其特征在于,采用线性交替方向乘子法对所述优化模型进行求解时:
6.根据权利要求5所述的稀疏孔径带微动部件目标结构化isar成像方法,其特征在于,在对各所述子问题进行交替迭代求解时,还通过设置迭代次数或误差精度来控制迭代过程,从而得到最终的目标主体isar图像;
7.一种稀疏孔径带微动部件目标结构化isar成像装置,其特征在于,所述装置包括:
8.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至6中任一项所述方法的步骤。
技术总结
本申请涉及一种稀疏孔径带微动部件目标结构化ISAR成像方法及装置。所述方法包括:首先将带有微动部件目标的雷达回波数据将转化为一维距离像,然后根据目标中主体和微动部件对应的一维距离像与所要求解的目标主体ISAR图像之间的关系,构建得到问题模型。在对目标主体ISAR图像进行求解时,利用矩阵核范数、l<subgt;1</subgt;范数以及l<subgt;2,1</subgt;范数分别对图像的低秩、稀疏以及结构化稀疏特性进行约束,得到优化模型。最后采用线性交替方向乘子法对所述优化模型进行求解,得到带有微动部件目标主体的ISAR图像。采用本方法可提升稀疏孔径下带微动部件目标主体ISAR图像的质量。
技术研发人员:张双辉,买彦博,姜卫东,刘永祥,张弛,张文鹏,夏靖远,智帅峰
受保护的技术使用者:中国人民解放军国防科技大学
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!