基于双目相机的大型塔筒法兰平面度测量系统及其方法
本发明涉及工业测量领域,尤其涉及一种基于双目相机的大型塔筒法兰平面度测量系统及其方法。
背景技术:
1、随着工业化的发展,对于管道、容器和其他设备的连接需求越来越大,其中大型法兰作为连接管道、密封气体液体的重要零件之一,在工业生产中发挥着关键的作用。法兰平面度决定着设备的安全性和可靠性。通过提高大型法兰平面度的测量精度和效率,能够辅助作业人员及时排查并修正法兰的加工误差,提高法兰的产品质量与安装精度,减少安全隐患。
2、目前,大型法兰的平面度测量方法主要存在两大问题。一是传统的大型法兰现场加工通常依赖于人工测量,而人工测量法兰平面度存在一定误差且要投入大量时间,增加生产成本,测量结果主观性大。二是在现有的大型法兰加工车间中,常采用进口千分表进行法兰平面度的测量和调整,设备昂贵且操作不便,仍需要人为定点,无法一站式自动化完成对法兰平面度的检测,生产成本昂贵,在一定程度上降低了法兰的加工效率。
技术实现思路
1、有鉴于此,本发明的目的在于提出一种基于双目相机的大型塔筒法兰平面度测量系统及其方法。
2、为了实现上述的技术目的,本发明所采用的技术方案为:
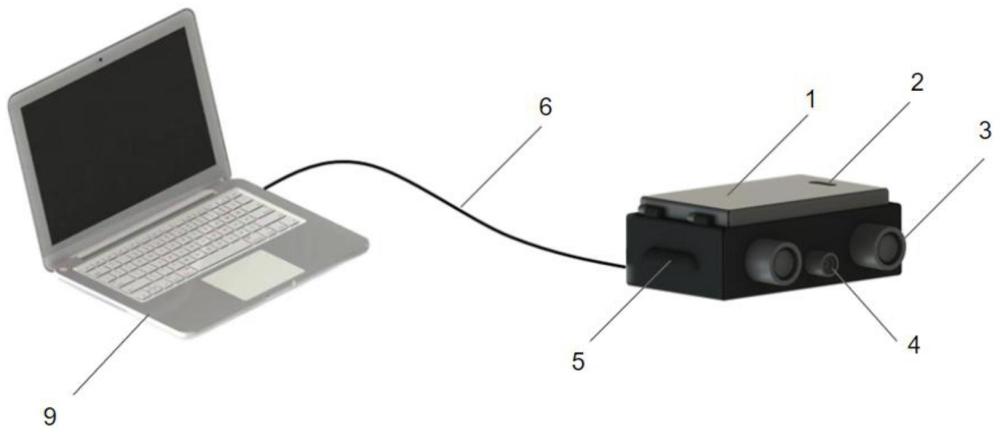
3、一种基于双目相机的大型塔筒法兰平面度测量系统,包括:
4、双目相机,用于采集图像;
5、线激光器,用于辅助采集图像时,定位目标特征点;
6、长方体外壳,用于隔绝外部光照,所述双目相机与线激光固定安装于长方体外壳中;
7、计算机,与双目相机电性连接,用于控制双目相机进行拍照采集,并接收相机采集的图像,对图像进行矫正和预处理,并利用图像目标特征点的三维信息,对法兰平面度进行检测。
8、作为一种可能的实施方式,进一步的,基于双目相机的大型塔筒法兰平面度测量系统还包括激光调节旋钮,其安装于长方体外壳上,用于调节线激光器发射角度。
9、作为一种可能的实施方式,进一步的,所述长方体外壳由长方形隔热石棉板组成。
10、作为一种可能的实施方式,进一步的,所述双目相机的两个摄像头分别位于长方体外壳正面的左右两侧,且双目相机的光轴线保持垂直。
11、作为一种可能的实施方式,进一步的,所述线激光器固定在长方体外壳正面中心处,且与双目相机摄像头平行。
12、本发明还提供一种基于双目相机的大型塔筒法兰平面度测量系统的法兰平面度检测方法,包括:
13、s1:对双目相机进行标定;
14、s2:调整线激光转动角度,使其线激光能够照射在所需目标特征位置;
15、s3:对大型塔筒法兰进行图像采集;
16、s4:对采集的图像进行矫正和预处理;
17、s5:对采集的所有特征点进行三维信息计算,通过最小二乘法拟合法兰平面,从而实现法兰平面度的检测。
18、作为一种可能的实施方式,进一步的,s1具体包括如下步骤:
19、s11:采集不同姿态下的完整的标定板照片至少15张,通过张正友标定法以及matalab软件分别进行单目左右相机标定,计算其内参、外参、畸变系数;
20、s12:完成左右单目相机标定后,进行双目相机标定;具体为:
21、根据单目标定所得到的参数,计算左右相机在世界坐标系下的坐标,计算方式如下:
22、
23、其中,pw为标定板上的某个点在世界坐标系下的坐标;pl、pr为左右相机在世界坐标系下的坐标;rl、tl为该点相对左相机主点的旋转、平移矩阵;rr、tr为该点相对右相机主点的旋转、平移矩阵;
24、根据p=r·pl+t,可以得出最终双目参数标定结果,如下:
25、
26、其中,r为旋转矩阵,t为平移矩阵。
27、作为一种可能的实施方式,进一步的,s3具体步骤如下:
28、在拍摄大型塔筒法兰时,线激光器每发射一次,拍摄一组,共发射4次,拍摄4组图像。
29、作为一种可能的实施方式,进一步的,s4具体包括如下步骤:
30、s41:利用步骤s1相机标定得到的相机内参和畸变系数对图像进行矫正;
31、s42:对采集到的图像进行预处理,包括噪声去除以及图像匹配,以保证照片数据的准确性和一致性;具体为:
32、采用算术平均滤波法,对图像进行噪声去除;具体如下:
33、其中为复原图像;g(r,c)为噪声图像;sxy为中心点为(x,y),大小为m×n的矩形子窗口的坐标;(r,c)为噪声图像的中心点坐标;
34、接着,采用前向累加法对图像进行图像匹配;具体如下:
35、i(x)≠t(x)
36、i(w[x:p])=t(x)
37、
38、其中,i(x)为输入图像,t(x)为对齐图像,w为warp变换,p1、p2、p4、p5表示剪切和旋转的组合,p3、p6表示位移,p7、p8表示增加了平面度投射。
39、作为一种可能的实施方式,进一步的,s5具体包括如下步骤:
40、s51:采用最小二乘法,对所有特征点进行平面拟合;具体如下:
41、由平面方程ax+by+cz+d=0(c≠0),记
42、用n个点拟合平面方程,使最小,求导并改写矩阵形式得:
43、
44、最后解得a0、a1、a2,即可求得平面方程;
45、其中,ax+by+cz+d=0(c≠0)为平面方程一般式,xi,yi,zi为特征点x坐标、y坐标和z坐标;
46、s52:根据拟合的平面,计算距离平面最远点以及最近点,取差值即可得到该平面的平面度。
47、采用上述的技术方案,本发明与现有技术相比,其具有的有益效果为:
48、本发明提供的法兰平面度测量系统及其方法可实现对大型塔筒法兰平面度的检测。该系统具有易操作以及便于携带的特点,根据检测的平面度信息,作业人员能够及时调整加工,确保设备的安全性和可靠性。其能够代替传统车间通过人工定位的方式检测平面度,从而提高生产效率,节约成本,在保障工人人身安全的同时,降低工人劳动强度。
技术特征:
1.一种基于双目相机的大型塔筒法兰平面度测量系统,其特征在于,包括:
2.根据权利要求1所述的基于双目相机的大型塔筒法兰平面度测量系统,其特征在于,还包括激光调节旋钮,其安装于长方体外壳上,用于调节线激光器发射角度。
3.根据权利要求1所述的基于双目相机的大型塔筒法兰平面度测量系统,其特征在于,所述长方体外壳由长方形隔热石棉板组成。
4.根据权利要求1所述的基于双目相机的大型塔筒法兰平面度测量系统,其特征在于,所述双目相机的两个摄像头分别位于长方体外壳正面的左右两侧,且双目相机的光轴线保持垂直。
5.根据权利要求1所述的基于双目相机的大型塔筒法兰平面度测量系统,其特征在于,所述线激光器固定在长方体外壳正面中心处,且与双目相机摄像头平行。
6.一种基于权利要求1~5任意一项所述基于双目相机的大型塔筒法兰平面度测量系统的法兰平面度检测方法,其特征在于,包括:
7.根据权利要求6所述的法兰平面度检测方法,其特征在于,s1具体包括如下步骤:
8.根据权利要求6所述的法兰平面度检测方法,其特征在于,s3具体步骤如下:
9.根据权利要求7所述的法兰平面度检测方法,其特征在于,s4具体包括如下步骤:
10.根据权利要求6所述的法兰平面度检测方法,其特征在于,s5具体包括如下步骤:
技术总结
本发明公开了一种基于双目相机的大型塔筒法兰平面度测量系统及其方法;该系统主要包括长方体外壳、双目相机、线激光器、计算机和激光调节旋钮。长方体外壳用于隔绝外部光照以及固定相机;双目相机用于拍摄塔筒法兰左右照片;线激光器用于辅助采集图像时,定位目标特征点;计算机用于控制双目相机进行拍摄;激光调节旋钮,用于调节线激光发射角度。本发明利用双目相机获取左右图像,对采集的所有特征点进行三维信息计算,利用目标特征点的三维信息,通过最小二乘法拟合法兰平面,从而实现法兰平面度的检测。
技术研发人员:练国富,张梦思,张学明,罗龙妹,陈昌荣,高险峰,王磊
受保护的技术使用者:福建理工大学
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!