场车无线测速方法及系统与流程
本发明属于车辆速度测量,具体涉及一种场车无线测速方法及系统。
背景技术:
1、高速行驶的场(厂)车可能会导致意外事故、设备损坏或者产品损坏等安全隐患,因此需要采取措施来进行场车速度的准确测量,确保场车的安全行驶。
2、目前,常规的车辆测速方法一般有利用gps测速、雷达测速、视频测速和地感线圈测速等,这些测速方法常同于一般的道路交通测速,比如通过车载传感器测量周围移动目标的速度,固定在公路龙门架上的传感器采集数据,进行车速测算。然而观光车、叉车等场车的工作环境相对复杂,尤其观光车通常绕山路行驶,路线环境复杂多变,通过布设地感线圈、在龙门吊上安装传感器等测速方式存在安装、维护困难等问题。gps测速会受到信号遮挡、定位误差的影响,导致gps测速不准确。雷达测速是利用多普勒效应进行速度测量,同样需要传感器安装在道路两旁或车辆所经过的公路上方的龙门架上,且容易受到雷达发射波与车辆行驶方向之间的夹角变化的影响,影响测速精度。视频测速等方式虽然原理简单,但是误差较大。
3、因此,现有的车辆测速方式存在安装和维护困难、误差较大等问题,不适用于场车速度准确测量。
技术实现思路
1、有鉴于此,本发明提出了一种场车无线测速方法及系统,用于解决现有的场车速度测量误差较大的问题。
2、本发明第一方面,公开了一种场车无线测速方法,所述方法包括:
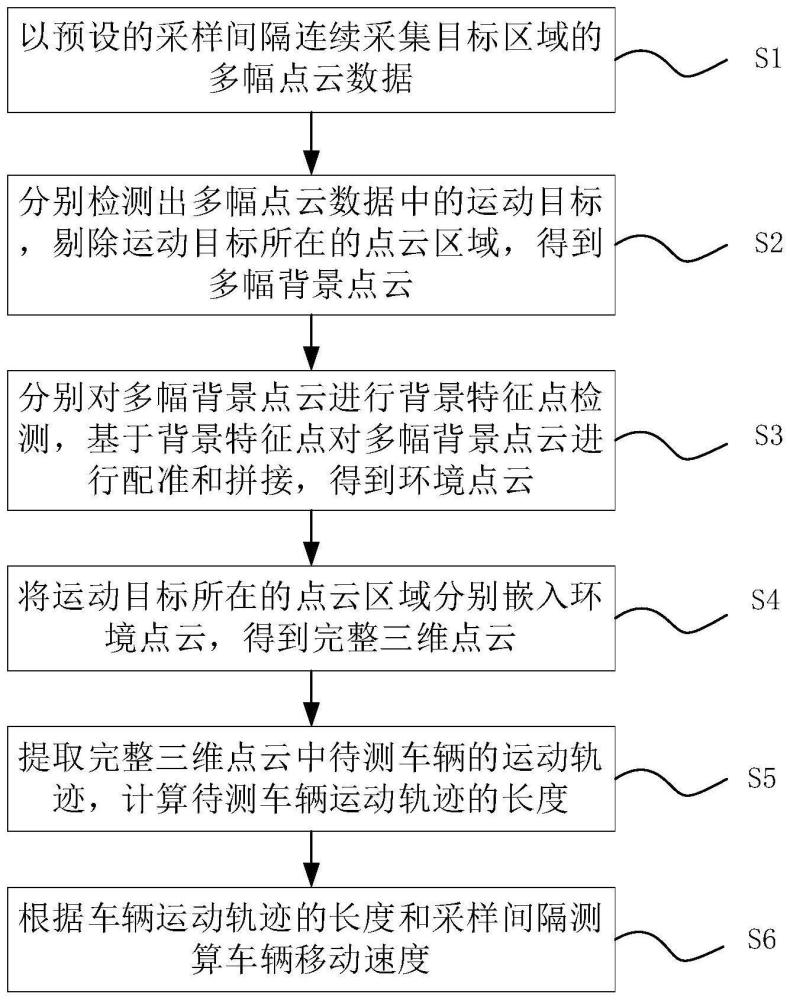
3、以预设的采样间隔连续采集目标区域的多幅点云数据;
4、分别检测出多幅点云数据中的运动目标,剔除运动目标所在的点云区域,得到多幅背景点云;
5、分别对多幅背景点云进行背景特征点检测,基于背景特征点对多幅背景点云进行配准和拼接,得到环境点云;
6、将运动目标所在的点云区域分别嵌入环境点云,得到完整三维点云;
7、提取完整三维点云中待测车辆的运动轨迹,计算待测车辆运动轨迹的长度;
8、根据车辆运动轨迹的长度和采样间隔测算车辆移动速度。
9、在以上技术方案的基础上,优选的,所述目标区域为包含待测车辆和周围环境的区域,所述多幅点云数据是通过激光雷达扫描仪对视野内的目标区域扫描得到,且相邻两幅点云数据有重合。
10、在以上技术方案的基础上,优选的,所述分别检测出多幅点云数据中的目标车辆具体包括:
11、将多幅点云数据分别输入预训练的amdnet网络模型,提取多幅点云数据中的运动目标,标记运动目标所在的点云区域。
12、在以上技术方案的基础上,优选的,所述分别对多幅背景点云进行背景特征点检测,基于背景特征点对多幅背景点云进行配准和拼接,得到环境点云具体包括:
13、采用sift算法分别提取相邻两幅背景点云的特征点,构建特征描述符,并对每幅背景点云进行空间网格划分;
14、对相邻两幅背景点云进行局部匹配,分别筛选局部特征点;所述局部特征点的数量大于等于4个;
15、以筛选出的每个局部特征点为节点、以同一邻域内的局部特征点的连接关系为边,分别为每幅背景点云构建特征骨骼;
16、计算相邻两幅背景点云的特征骨骼之间的结构相似度;
17、根据相邻幅点云数据的特征骨骼之间的结构相似度进行特征骨骼生长;
18、根据特征骨骼生长结果对相邻两幅背景点云进行icp配准,并根据icp配准结果进行点云拼接,得到环境点云。
19、在以上技术方案的基础上,优选的,所述以筛选出的每个局部特征点为节点、以同一邻域内的局部特征点的连接关系为边,分别为每幅背景点云构建特征骨具体包括:
20、对筛选出的局部特征点顺序编号,依次计算当前局部特征点与其余局部特征点之间的欧式距离;
21、以每个局部特征点为节点,提取当前局部特征点的k邻域内的局部特征点;
22、将k邻域内的局部特征点分别与当前局部特征点连接,构成节点之间的边;
23、比较边的两端的局部特征点之间的曲率大小,曲率小的局部特征点为边的起点,曲率大的局部特征点为边的终点,边的权重为两个局部特征点之间的法向量夹角,以此构建有向图结构,作为每幅背景点云的特征骨骼。
24、在以上技术方案的基础上,优选的,所述计算相邻两幅背景点云的特征骨骼之间的结构相似度具体包括:
25、
26、其中,sim表示结构相似度,xi、xj、xk和xi'、x'j、x'k分别为相邻两幅背景点云对应的特征骨骼中相匹配的第i、j、k对局部特征点的三维坐标,n为特征骨骼中的节点总数;均为对应的两个三维坐标之间的向量;d(xi,xj)、d(xi',x'j)分别为xi,xj之间的欧式距离、xi',x'j之间的欧式距离;α、β、γ为权重系数;a、a'分别为相邻两幅背景点云对应的特征骨骼的邻接矩阵,s(a,a')为两个邻接矩阵a、a'之间的相似度:
27、
28、其中,auv、a'uv分别为邻接矩阵a、a'的第u行、第v列元素,max()为求最大值函数。
29、在以上技术方案的基础上,优选的,所述根据相邻幅点云数据的特征骨骼之间的结构相似度进行特征骨骼生长具体包括:
30、将相邻两幅背景点云的特征骨骼之间的结构相似度与第一预设阈值比较;
31、若结构相似度大于等于第一预设阈值,在除局部特征点以外的剩余特征点中进行增补特征点筛选,并采用增补特征点对当前特征骨骼中的节点进行增补,构建新的特征骨骼;第二特征点的数量大于等于1个;
32、若结构相似度小于第一预设阈值,在局部特征点所在区域进行替换特征点筛选,并采用替换特征点对当前特征骨骼中的节点进行替换,构建新的特征骨骼;所述增补特征点筛选和替换特征点筛选的条件为:增补或者替换之后,相邻两幅背景点云之间的局部匹配误差减小;
33、重复以上计算结构相似度、构建新的特征骨骼的过程,直到相邻幅点云数据的特征骨骼之间的结构相似度大于等于第一预设阈值且新的特征骨骼的节点数量达到第二预设阈值;所述第二预设阈值大于局部特征点的数量。
34、在以上技术方案的基础上,优选的,所述以筛选出的局部特征点为节点、以同一邻域内的局部特征点的连接关系为边,为每幅背景点云构建特征骨骼具体包括:
35、对筛选出的局部特征点顺序编号,依次计算当前局部特征点与其余局部特征点之间的欧式距离;
36、以每个局部特征点为节点,提取当前局部特征点的k邻域内的局部特征点;
37、将k邻域内的局部特征点分别与当前局部特征点连接,构成节点之间的边;
38、比较边的两端的局部特征点之间的曲率大小,曲率小的局部特征点为边的起点,曲率大的局部特征点为边的终点,边的权重为两个局部特征点之间的法向量夹角,以此构建有向图结构,作为每幅背景点云的特征骨骼。
39、在以上技术方案的基础上,优选的,所述计算相邻两幅背景点云的特征骨骼之间的结构相似度具体包括:
40、
41、其中,sim表示结构相似度,xi、xj、xk和xi'、x'j、x'k分别为相邻两幅背景点云对应的特征骨骼中相匹配的第i、j、k对局部特征点的三维坐标,n为特征骨骼中的节点总数;均为对应的两个三维坐标之间的向量;d(xi,xj)、d(xi',x'j)分别为xi,xj之间的欧式距离、xi',x'j之间的欧式距离;α、β、γ为权重系数;a、a'分别为相邻两幅背景点云对应的特征骨骼的邻接矩阵,s(a,a')为两个邻接矩阵a、a'之间的相似度:
42、
43、其中,auv、a'uv分别为邻接矩阵a、a'的第u行、第v列元素,max()为求最大值函数。
44、本发明第二方面,公开了一种场车无线测速系统,所述系统包括:
45、数据采集模块:用于以预设的采样间隔连续采集目标区域的多幅点云数据;
46、背景提取模块:用于分别检测出多幅点云数据中的运动目标,剔除运动目标所在的点云区域,得到多幅背景点云;
47、点云合成模块:用于分别对多幅背景点云进行背景特征点检测,基于背景特征点对多幅背景点云进行配准和拼接,得到环境点云;将运动目标所在的点云区域分别嵌入环境点云,得到完整三维点云;
48、速度测算模块:用于提取完整三维点云中待测车辆的运动轨迹,计算待测车辆运动轨迹的长度;根据车辆运动轨迹的长度和采样间隔测算车辆移动速度。
49、本发明第三方面,公开一种电子设备,包括:至少一个处理器、至少一个存储器、通信接口和总线;
50、其中,所述处理器、存储器、通信接口通过所述总线完成相互间的通信;
51、所述存储器存储有可被所述处理器执行的程序指令,所述处理器调用所述程序指令,以实现如本发明第一方面所述的方法。
52、本发明第四方面,公开一种计算机可读存储介质,所述计算机可读存储介质存储计算机指令,所述计算机指令使计算机实现如本发明第一方面所述的方法。
53、本发明相对于现有技术具有以下有益效果:
54、1)本发明连续采集目标区域的多幅点云数据后,剔除运动目标所在的点云区域,消除运动目标速度测量的影响,通过多幅背景点云进行配准和拼接得到环境点云,从而提取待测车辆运动轨迹,实现测速测量,不需要在特定位置安装传感器,通过各类便携式激光雷达扫描仪即可完成场车的车速无线测量,一方面降低了设备安装维护难度,另一方面,相较于现有的雷达测速,本发明不受测量角度的影响,通过自动点云配准可以实现任意角度的速度测量,通过三维点云处理计算还可以提高测量精度。
55、2)本发明对相邻两幅背景点云的重合区域进行局部匹配,分别筛选局部特征点,通过图结构为每幅背景点云构建特征骨骼,根据相邻幅点云数据的特征骨骼之间的结构相似度进行特征骨骼生长,实现相邻幅点云数据的匹配点对的准确选取,实现粗配准,为后续icp精配准提供良好初值,提高配准精度,从而融合得到准确的环境点云,有利于提高速度测量精度。
56、3)本发明基于相邻两幅背景点云的重合部分点云数据的空间结构不变的原理,考虑了对应的局部特征点之间的距离相似性、角度相似性,以及对应的特征骨骼的邻接矩阵之间的相似性,综合计算相邻两幅背景点云的特征骨骼之间的结构相似度,从而更准确衡量相邻两幅背景点云的重合区域的空间结构相似性,提高特征点筛选的可靠性。
- 还没有人留言评论。精彩留言会获得点赞!