一种应用GIS的地理信息勘测系统的制作方法
本申请涉及地理信息扫描勘测的,尤其涉及一种应用gis的地理信息勘测系统。
背景技术:
1、地理信息扫描勘测工作的一般过程为,勘测人员持有手持三维激光扫描仪进行移动,手持三维激光扫描仪的转动扫描头处于持续摆动状态,勘测人员使手持激光扫描仪的扫描方向朝向指定的地理位置,即可实现对该地理位置的地理信息的扫描勘测。实际的地理信息扫描勘测工作的工作量一般较大,涉及的地理位置一般较多,手持三维激光扫描仪不利于勘测人员长期的扫描勘测工作。
技术实现思路
1、本申请提供了一种应用gis的地理信息勘测系统,其能够为勘测人员的扫描勘测工作提供方便。
2、本申请实施例中的一种应用gis的地理信息勘测系统具体采用以下技术方案:
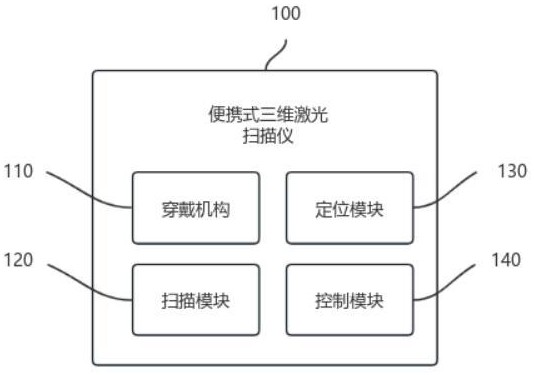
3、一种应用gis的地理信息勘测系统,包括便携式三维激光扫描仪,所述便携式三维激光扫描仪包括穿戴机构、扫描模块、定位模块和控制模块;
4、所述穿戴模块用于供人穿戴,以使穿戴机构固定于穿戴者;所述扫描模块、定位模块和控制模块均固定设置于所述穿戴机构;
5、所述扫描模块包括一个用于扫描地理信息的转动扫描头;
6、所述定位模块用于获取便携式三维激光扫描仪的定位信息;
7、所述控制模块分别连接所述扫描模块和定位模块,用于控制扫描模块的转动扫描头的转动速度,以及用于接收所述定位信息,以及用于接收勘测任务明细。
8、通过采用上述技术方案,该便携式三维激光扫描仪可以被勘测人员穿戴,并且能够实现定位以及勘测任务明细的接收,并且控制模块还能够对转动扫描头的转动速度进行控制,从而能够对勘测人员的扫描勘测工作提供方便。
9、所述控制模块被配置为,所述根据所述定位信息和预获取的勘测任务明细信息确定所述转动速度包括:
10、
11、式中,n表示转动速度,表示预设转速,、、分别为预获取的第一影响系数、第二影响系数和第三影响系数,、分别为第一计算权重和第二计算权重。
12、进一步地,所述勘测任务明细信息包括任务区域数据以及任务区域数据中每一任务位置的地形类别数据;
13、所述控制模块还用于获取第一影响系数,获取第一影响系数的方法包括:
14、在所述任务区域数据中确定当前时刻的定位信息反映的任务位置;
15、以当前时刻的任务位置为圆心,以预设的第一距离数据为半径,在任务区域数据中确定一圆形的位置范围数据;
16、基于地形类别数据对所述位置范围数据中的任务位置进行聚类,得到同类地形地块;
17、根据同类地形地块的数量计算所述第一影响系数;
18、
19、式中,a为同类地形地块的数量,m为预设数量。
20、进一步地,所述控制模块还用于获取第二影响系数,获取第二影响系数的方法包括:
21、
22、式中,v为由定位信息计算得到的当前时刻的移动速度,为理论移动速度最大值,t为正整数且1。
23、进一步地,所述控制模块还用于获取第三影响系数,获取第三影响系数的方法包括:
24、以当前时刻的任务位置为圆心,以预设的第二距离数据为半径,在任务区域数据中确定一圆形的影响范围数据;
25、基于地形类别数据对所述影响范围数据中的任务位置进行聚类,得到相同地形地块;
26、基于预构建的地形系数对照表,确定每一地形类别数据对应的行进系数分值,并确定每一相同地形地块的行进系数分值,越方便行走的地形类别数据行进系数分值越高;
27、设相同地形地块的数量共有p个,第i个相同地形地块的行进系数分值为,地形系数对照表中最大的行进系数分值为,则。
28、进一步地,所述控制模块每个第一预设时长确定一次转动速度,确定的转动速度在第一预设时长内有效。
29、进一步地,所述控制模块被进一步配置为:
30、在第二预设时长内记录定位信息;
31、确定第二预设时长内距离最远的两个定位信息之间的相差距离;
32、判断相差距离是否小于第三距离阈值;
33、若是,则控制转动扫描头停止工作。
34、综上所述,本申请具体包含以下有益效果:
35、1. 提供了一种应用gis的地理信息勘测系统,其中的便携式三维激光扫描仪方便勘测人员使用,且具备定位和勘测任务明细接收功能,转动扫描头的转动速度可控,从而能够为勘测人员的扫描勘测工作提供方便;
36、2. 控制模块能够根据合理计算确定转动扫描头的转动速度,实现转动扫描头的扫描速度的智能调整,有利于进一步为勘测人员的扫描勘测工作提供方便。
37、应当理解,
技术实现要素:
部分中所描述的内容并非旨在限定本申请的实施例的关键或重要特征,亦非用于限制本申请的范围。本申请的其它特征将通过以下的描述变得容易理解。
技术特征:
1.一种应用gis的地理信息勘测系统,包括便携式三维激光扫描仪(100),其特征在于,所述便携式三维激光扫描仪(100)包括穿戴机构(110)、扫描模块(120)、定位模块(130)和控制模块(140);
2.根据权利要求1所述的系统,其特征在于,所述勘测任务明细信息包括任务区域数据以及任务区域数据中每一任务位置的地形类别数据;
3.根据权利要求2所述的系统,其特征在于,所述控制模块(140)还用于获取第二影响系数,获取第二影响系数的方法包括:
4.根据权利要求3所述的系统,其特征在于,所述控制模块(140)还用于获取第三影响系数,获取第三影响系数的方法包括:
5.根据权利要求4中所述的系统,其特征在于,所述控制模块(140)每个第一预设时长确定一次转动速度,确定的转动速度在第一预设时长内有效。
6.根据权利要求5中所述的系统,其特征在于,所述控制模块(140)被进一步配置为:
技术总结
本申请提供了一种应用GIS的地理信息勘测系统,属于地理信息扫描勘测的技术领域,用于解决相关技术中手持三维激光扫描仪不利于勘测人员长期的扫描勘测工作的问题,该系统中,穿戴模块用于供人穿戴,以使穿戴机构固定于穿戴者;扫描模块、定位模块和控制模块均固定设置于穿戴机构;扫描模块包括一个用于扫描地理信息的转动扫描头;定位模块用于获取便携式三维激光扫描仪的定位信息;控制模块分别连接扫描模块和定位模块,用于控制扫描模块的转动扫描头的转动速度,以及用于接收定位信息,以及用于接收勘测任务明细。该便携式三维激光扫描仪能够对勘测人员的扫描勘测工作提供方便。
技术研发人员:张瑞斐,于强
受保护的技术使用者:江苏奇点闪耀科技有限公司
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!