面向生物组织高通量检测的生物光学显微镜系统的制作方法
本发明涉及一种自动显微观察系统的,尤其是面向生物组织高通量检测的生物光学显微镜系统。
背景技术:
1、目前,对于显微观察均是采用人工将生物培养皿放置到显微镜的承载台上,然后人工进行观察生物培养皿中的培养区所培养的生物组织细胞情况,然而该方式工作效率较为低下,因此对于数量较多的生物培养皿,则需要较多的人工进行,而且对于所培养的生物组织细胞观察需要专业人士操作和记录,从而使得工作成本较高,所以急需一种解决上述技术问题的面向生物组织高通量检测的生物光学显微镜系统。
技术实现思路
1、本发明的目的是为了解决上述技术的不足而设计的面向生物组织高通量检测的生物光学显微镜系统,其具体结构及方式如下。
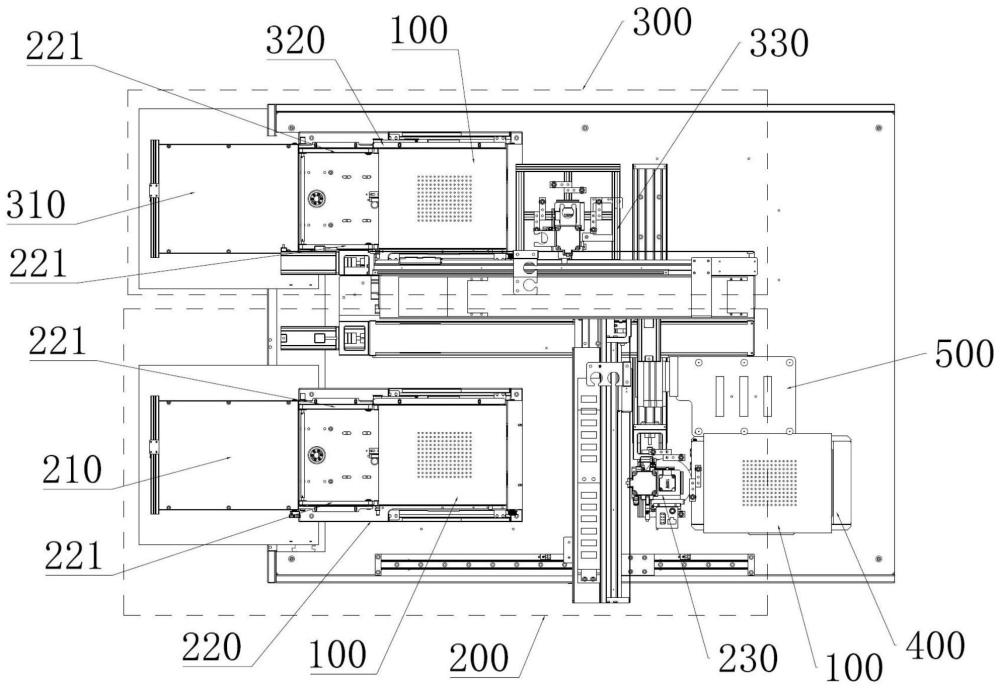
2、本发明所设计的面向生物组织高通量检测的生物光学显微镜系统,其特征在于,包括收料区、给料区、水平移料台、以及位于给料区的出料端的自动显微观察装置,所述自动显微观察装置包括生物培养皿承载台和位于所述生物培养皿承载台的通孔下方的生物光学显微镜;
3、所述给料区内设置有自动给料agv单元、给料传输单元和给料机器人;所述自动给料agv单元包括agv给料运输车、第一存料仓、位于第一存料仓内的多层生物培养皿自动给料层和位于第一存料仓一外侧的给料驱动机构,所述第一存料仓安装于所述agv给料运输车的升降驱动机构上,所述给料驱动机构包括第一主动齿轮,各所述生物培养皿自动给料层的两端分别位于所述第一存料仓的出料口和进料口处,各所述生物培养皿自动给料层的驱动部分别安装有第一从动齿轮,各所述第一从动齿轮上至下依次呈直线排列,所述给料驱动机构的第一主动齿轮基于所述agv给料运输车的升降驱动机构驱动所述第一存料仓上升或下降而选择性与一第一从动齿轮啮合传动,使得上升或下降后的生物培养皿自动给料层与所述给料传输单元的传输面位置对应,此时所述给料驱动机构通过第一主动齿轮驱动该对应位置的所述生物培养皿自动给料层工作以将生物培养皿输出至给料传输单元的进料端,所述给料传输单元将所传输过来的生物培养皿传输至其出料端;
4、所述给料机器人将所述给料传输单元出料端处的生物培养皿抓取并转移至所述生物培养皿承载台上,且生物培养皿的培养区与所述生物培养皿承载台的通孔位置对应,或者所述给料机器人将所述生物培养皿承载台上的生物培养皿抓取并转移至所述水平移料台上;
5、所述收料区内设置有收料传输单元和收料机器人,所述水平移料台的进料端位于所述自动显微观察装置的旁侧、所述水平移料台的出料端位于收料区的进料端,所述收料机器人将所述水平移料台出料端处的生物培养皿抓取并转移至所述收料传输单元的进料端上,所述收料传输单元将其进料端处的生物培养皿输出。
6、进一步优选方案,所述收料区内还设置有自动收料agv单元,自动收料agv单元位于所述收料区的出料端,所述自动给料agv单元包括agv收料运输车、第二存料仓、位于第二存料仓内的多层生物培养皿自动收料层和位于第二存料仓一外侧的收料驱动机构,所述第二存料仓安装于所述agv收料运输车的升降驱动机构上,所述收料驱动机构包括第二主动齿轮,各所述生物培养皿自动收料层的两端分别位于所述第二存料仓的出料口和进料口处,各所述生物培养皿自动收料层的驱动部分别安装有第二从动齿轮,各所述第二从动齿轮上至下依次呈直线排列,所述收料驱动机构的第二主动齿轮基于所述agv收料运输车的升降驱动机构驱动所述第二存料仓上升或下降而选择性与一第二从动齿轮啮合传动,使得上升或下降后的生物培养皿自动收料层与所述收料传输单元的传输面位置对应,以对所述收料传输单元输出的生物培养皿承接,此时所述收料驱动机构通过第二主动齿轮驱动该对应位置的所述生物培养皿自动给料层工作以将生物培养皿收纳至第二存料仓内。
7、进一步优选方案,多层所述生物培养皿自动给料层设置为三层以上,并且各所述生物培养皿自动给料层呈上下并等间距间隔设置,各所述生物培养皿自动给料层包括两个相对设置的第一带传输机构,两个第一带传输机构的传送面相互齐平,且每个第一带传输机构上靠近给料传输单元一侧的传输带轮通过转轴安装所述从动齿轮;多层所述生物培养皿自动收料层设置为三层以上,并且各所述生物培养皿自动收料层呈上下并等间距间隔设置,各所述生物培养皿自动给料层包括两个相对设置的第二带传输机构,两个第二带传输机构的传送面相互齐平。
8、进一步优选方案,所述给料机器人包括第一横向平移驱动装置、纵向平移驱动装置、第一垂直升降驱动装置、第一负压吸附装置、以及位于进料区和收料区之间的安装架,所述第一横向平移驱动装置安装于安装架上,所述纵向平移驱动装置的一端安装于第一横向平移驱动装置的滑块,所述纵向平移驱动装置的另一端下方设置有支撑架,支撑架上设置有直线导轨,直线导轨的滑块与所述纵向平移驱动装置的另一端连接,所述第一垂直升降驱动装置安装于纵向平移驱动装置的滑块上,所述第一负压吸附装置安装于第一垂直升降驱动装置的升降部上,所述第一横向平移驱动装置和直线导轨沿给料区长度方向设置,所述纵向平移驱动装置沿给料区宽度方向设置,所述第一横向平移驱动装置、纵向平移驱动装置、第一垂直升降驱动装置和第一负压吸附装置均位于给料传输单元的上方。
9、进一步优选方案,所述收料机器人包括第二横向平移驱动装置、第二垂直升降驱动装置和第二负压吸附装置,所述第二横向平移驱动装置安装于所述安装架,所述第二垂直升降驱动装置安装于所述所述第二横向平移驱动装置的滑块上,所述第二负压吸附装置安装于所述第二垂直升降驱动装置的升降部上。
10、进一步优选方案,第一负压装置和第二负压装置均包括框架和安装于框架底面的多个负压吸盘,多个负压吸盘呈均匀分布。
11、进一步优选方案,所述水平移料台包括第三纵向平移驱动机构和台板,所述台板安装于所述第三纵向平移驱动机构的滑块上,第三纵向平移驱动机构的两端分别位于收料区的出料端和给料区的进料端,所述台板的上侧面设置有多个均匀分布的负压吸盘。
12、进一步优选方案,所述给料传输单元和给料传输单元均包括架体和两个相对设置的第三带传输机构,所述架上设置有传输通道,各所述第三带传输机构分别安装于所述传输通道的相对内壁上。
13、进一步优选方案,还包括上位机,所述上位机与光学显微镜的高分辨率相机通信相连。
14、进一步优选方案,所述自动给料agv单元和给料传输单元沿给料区的长度方向排列设置,所述自动收料agv单元和收料传输单元沿收料区的长度方向排列设置。
15、本发明所设计的面向生物组织高通量检测的生物光学显微镜系统,其有益效果如下:
16、本发明利用agv给料运输车将第一存料仓内未检测的生物培养皿自动运载至给料传输单元的进料端,然后第一存料仓内每上升或下降一次则生物培养皿自动给料层工作一次,以将第一存料仓内的多个生物培养皿逐个输送至给料传输单元上,然后给料传输单元将每个传输过来的未检测生物培养皿传输至其出料端,此时给料机器人工作将已经被光学显微镜观察完成的生物培养皿抓取并转移至水平移料台的台板上,同时将给料传输单元传输过来的未检测生物培养皿进行抓取并转移至光学显微镜上方的承载台上,最后,台板被移动至收料传输单元的进料端旁侧,收料机器人工作将台板上的生物培养皿进行抓取并转移至收料传输单元上,然后收料传输单元工作将已观察完成的生物培养皿传输至第二存料仓内的生物培养皿自动收料层上,在第二存料仓上升或下降而将空置的生物培养皿自动收料层与收料传输单元的传输面对应、并且生物培养皿自动收料层工作一次,使得第二存料仓内的每个生物培养皿自动收料层均收入有已检测观察的生物培养皿,待得让存料仓存满后,agv收料运输车将第二存料仓转运至收藏仓库中,由于上述未检测观察的生物培养皿和已检测观察的生物培养皿均采用全自动模式完成检测观察和转运,从而降低人工成功,并且提升了批量式多个生物培养皿进行检测观察的效率。
- 还没有人留言评论。精彩留言会获得点赞!