一种激光陀螺的跳模控制方法及跳模控制装置与流程
本发明涉及激光,尤其涉及一种激光陀螺的跳模控制方法及跳模控制装置。
背景技术:
1、激光陀螺的光学程长l等于激光波长λ与纵模阶数的乘积时,激光陀螺可以发生谐振,相应的q称为纵模阶数,即l=qλ。在激光陀螺工作过程中,随着谐振腔温度的变化,稳频通道内稳频气体的折射率增大,光学程长增加。当光学程长增加到一定程度后,激光陀螺从q阶纵模跳跃至q+1阶纵模,此过程称为跳模现象。公开号为cn117030198b的专利公开了一种激光器跳模检测器、检测方法、电子设备及存储介质。所述检测方法通过向光耦合器输出第一电流,并获取激光器的第二电流和光谱仪输出的中心波长、波长边模抑制比,然后计算第二电流差和中心波长差,最后根据第二电流差和中心波长差判断激光器是否跳模或根据波长边模抑制比判断激光器是否跳模。
2、在跳模过程中,激光陀螺内出现多模竞争,此时零偏较大,影响测量精度。若跳模时间过长,甚至出现跳模跳数,激光陀螺无法正常工作。公开号为cn111895987b的专利公开了一种减小激光陀螺温变效应的稳频装置。该稳频装置由螺杆、爪盘、压电陶瓷组成,螺杆膨胀和收缩方向与谐振腔腔体膨胀方向是相反的,保证激光陀螺不产生跳模。激光陀螺工作的温度通常为-40℃~70℃,激光陀螺的自由膨胀可以通过现有的稳频装置限制,但是空气折射率引起的光学程长变化难以通过稳频装置进行限制。而且在萨格纳克效应下,跳模是必然现象,延缓跳模的发生会导致在下一次跳模时,多模竞争时间过长,整个导航系统偏差过大。因此,有必要提供一种跳模控制方法,选择激光陀螺的目标纵模,通过调节光学程长使得激光陀螺尽快跳至目标纵模,避免跳模过程中零偏波动大和跳模跳数等问题。
技术实现思路
1、为了解决上述现有技术存在的缺陷,本发明提出了一种激光陀螺的跳模控制方法及跳模控制装置。本发明通过温度升高时的第一纵模集合和电压升高时的第二纵模集合预测工作稳定的下一目标纵模,通过调节光学程长使得激光陀螺尽快跳至目标纵模,避免自然跳模引起的多模竞争现象,提高激光陀螺在温度变化过程中的设备精度。
2、本发明的技术方案是这样实现的:
3、一种激光陀螺的跳模控制方法,包括以下步骤:
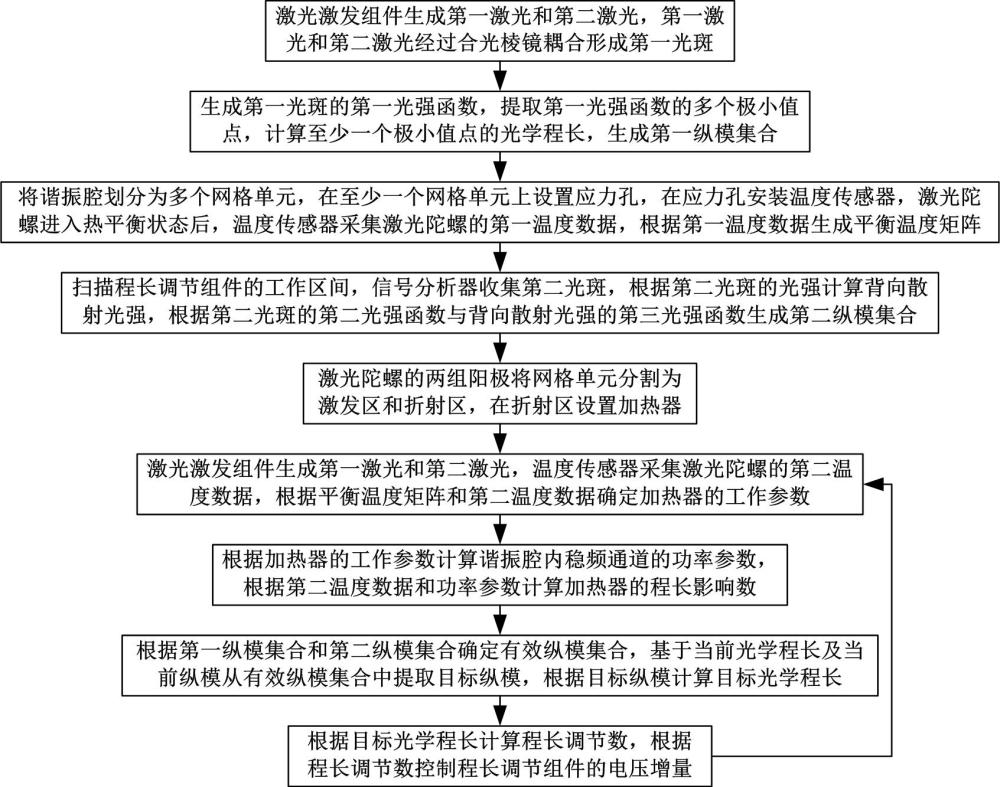
4、步骤1:激光激发组件生成第一激光和第二激光,第一激光和第二激光经过合光棱镜耦合形成第一光斑;
5、步骤2:生成第一光斑的第一光强函数,提取第一光强函数的多个极小值点,计算至少一个极小值点的光学程长,生成第一纵模集合;
6、步骤3:将谐振腔划分为多个网格单元,在至少一个网格单元上设置应力孔,在应力孔安装温度传感器,激光陀螺进入热平衡状态后,温度传感器采集激光陀螺的第一温度数据,根据第一温度数据生成平衡温度矩阵;
7、步骤4:扫描程长调节组件的工作区间,信号分析器收集第二光斑,根据第二光斑的光强计算背向散射光强,根据第二光斑的第二光强函数与背向散射光强的第三光强函数生成第二纵模集合;
8、步骤5:激光陀螺的两组阳极将网格单元分割为激发区和折射区,在折射区设置加热器;
9、步骤6:激光激发组件生成第一激光和第二激光,温度传感器采集激光陀螺的第二温度数据,根据平衡温度矩阵和第二温度数据确定加热器的工作参数;
10、步骤7:根据加热器的工作参数计算谐振腔内稳频通道的功率参数,根据第二温度数据和功率参数计算加热器的程长影响数;
11、步骤8:根据第一纵模集合和第二纵模集合确定有效纵模集合,基于当前光学程长及当前纵模从有效纵模集合中提取目标纵模,根据目标纵模计算目标光学程长;
12、步骤9:根据目标光学程长计算程长调节数,根据程长调节数控制程长调节组件的电压增量,返回至步骤6。
13、在本发明中,在步骤2中,在第一光强函数中提取大于合光限模阈值的至少一个极小值点,计算该极小值点的光学程长,根据激光谐振算法计算无效纵模,至少一个无效纵模组成第一纵模集合。
14、在本发明中,在步骤4中,背向散射光强g=g1ω1/(ω2+ω32)1/2,其中,g1为第二光斑的光强,ω1为激光陀螺的闭锁阈值,ω2为激光陀螺的角速度,ω3为谐振腔净增益。
15、在本发明中,在步骤4中,根据第二光斑的第二光强函数的极大值点确定多个候选纵模,根据背向散射光强的第三光强函数的极大值点确定多个非候选纵模,排除非候选纵模的多个候选纵模组成第二纵模集合。
16、在本发明中,在步骤6中,所述加热器由多组加热片组成,在至少一个网格单元内安装加热片,所述工作参数由每一加热片的加热功率组成,所述工作参数为p={p1, p2,…,pm},1、2、m均为加热片序号。
17、在本发明中,在步骤7中,提取稳频通道所在网格单元的多个加热片,稳频通道的功率参数,pk为第k个加热片的加热功率,x、y均为加热片序号,且1≤x<y≤m。
18、在本发明中,在步骤7中,根据第二温度数据计算稳频通道的平均温度t3,根据稳频通道的功率参数计算稳频通道的温升δt3,程长影响数δl= k2δt3/t3,其中,k2为稳频通道的分子散射系数。
19、在本发明中,在步骤8中,目标光学程长l'=λ(q+z),其中,q+z为目标纵模,q为当前纵模,z为跳模数,λ为激光谐振波长。
20、在本发明中,在步骤8中,有效纵模集合为第一纵模集合在第二纵模集合中的补集,目标纵模为有效纵模集合中光学程长与当前光学程长差值最小时对应的纵模。
21、在本发明中,在步骤9中,程长调节数δl'=l'- l0-δl,l0为当前光学程长。
22、一种根据所述激光陀螺的跳模控制方法的跳模控制装置,包括:
23、激光激发组件,用于生成第一激光和第二激光;
24、光路组件,光路组件包含谐振腔,第一激光和第二激光经过谐振腔到达合光棱镜;
25、激光采集组件,激光采集组件包含合光棱镜、信号分析器,合光棱镜用于收集第一光斑或第二光斑,信号分析器用于测量第一光斑或第二光斑的光强;
26、温度传感器,用于采集激光陀螺的第一温度数据和第二温度数据;
27、存储器,用于存储谐振腔的第一纵模集合和第二纵模集合;
28、加热器,用于加热激光陀螺的至少一个网格单元;
29、一第一控制器,用于控制加热器的开启和关闭;
30、一第二控制器,用于计算加热器的程长影响数,并根据程长调节数控制程长调节组件的电压增量。
31、在本发明中,所述程长调节组件包括交流电源、热敏感支架以及加热螺线管,交流电源经加热螺线管加热热敏感支架,根据程长调节数确定热敏感支架的伸长量,再确定交流电源的电压增量。
32、实施本发明的这种激光陀螺的跳模控制方法及跳模控制装置,具有以下有益效果:通过升温过程中的第一光强函数提取合光限模较浅的第一纵模集合,即不可用纵模;通过热平衡状态的第二光强函数与背向散射光强的第三光强函数提取第二纵模集合,即可用纵模。根据第一纵模集合与第二纵模集合确定有效纵模集合。在激光陀螺的温度变化过程中,以稳频通道的温升为基准确定目标纵模,据此控制程长调节组件。本发明可以避免程长调节组件在电压调节过程中频繁出现多模竞争导致跳模跳数,使温度变化引起的跳模快速完成且零偏稳定。进一步的,本发明通过平衡温度矩阵和第二温度数据确定稳频通道的功率参数,据此计算稳频通道的温升和温升引起的程长影响数。相对于气体加热器,该方法可以更准确的控制稳频通道的温度变化。
- 还没有人留言评论。精彩留言会获得点赞!