一种基于分层边界与可视图的自主探索方法及系统
本发明属于移动机器人自主探索领域,尤其涉及一种基于分层边界与可视图的自主探索方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、随着机器人技术的快速发展,移动机器人成为了很多探索性任务的重要工具;传统上,机器人的移动和行为往往依赖于预先规划的路径或固定程序;然而,在现实世界中,很多环境是未知的,有时甚至是危险或不可预测的;这种不确定性限制了机器人在面对未知、复杂或动态环境时的适应能力;自主探索允许机器人在没有预先获取的地图或信息的情况下,通过感知和决策来探索和理解其周围的环境;这种能力对于很多应用至关重要,特别是在灾后救援、航空航天、设备巡检等任务中。
3、在自主探索领域,基于边界的方法和基于采样的方法是解决该问题的经典方法:基于边界的方法首先检测提取自由空间和未知空间的边界,根据欧式距离和边界处的未知区域大小来评估边界并驱动机器人前往最佳目标点,此类方法存在边界检测效率低、边界提取不全、目标点评估不严谨等问题;基于视点采样的方法一般基于快速搜索随机树在环境地图中随机采样视点,考虑视点周围未知区域面积以及树枝长度,选择最有价值的树枝并驱动机器人前往视点,此类方法存在容易忽视地图角落、陷入局部区域、树成本过高等问题。
4、因此,目前机器人在未知环境中自主探索时,存在边界检测提取耗时、目标点评估不严谨、容易陷入局部环境、探索效率低等问题,导致自主探索效果不理想。
技术实现思路
1、为克服上述现有技术的不足,本发明提供了一种基于分层边界与可视图的自主探索方法及系统,根据octomap三维地图中状态变化的体素实时提取局部边界,增量构建全局边界,采用实际距离代价、转向角代价和期望信息量的评估标准,结合可视图与优先队列bfs,对候选目标点进行评估,提高了边界检测提取速度,降低了存储成本,提高了目标点的选择合理性和轨迹质量,提高了机器人自主探索的效率。
2、为实现上述目的,本发明的一个或多个实施例提供了如下技术方案:
3、本发明第一方面提供了一种基于分层边界与可视图的自主探索方法。
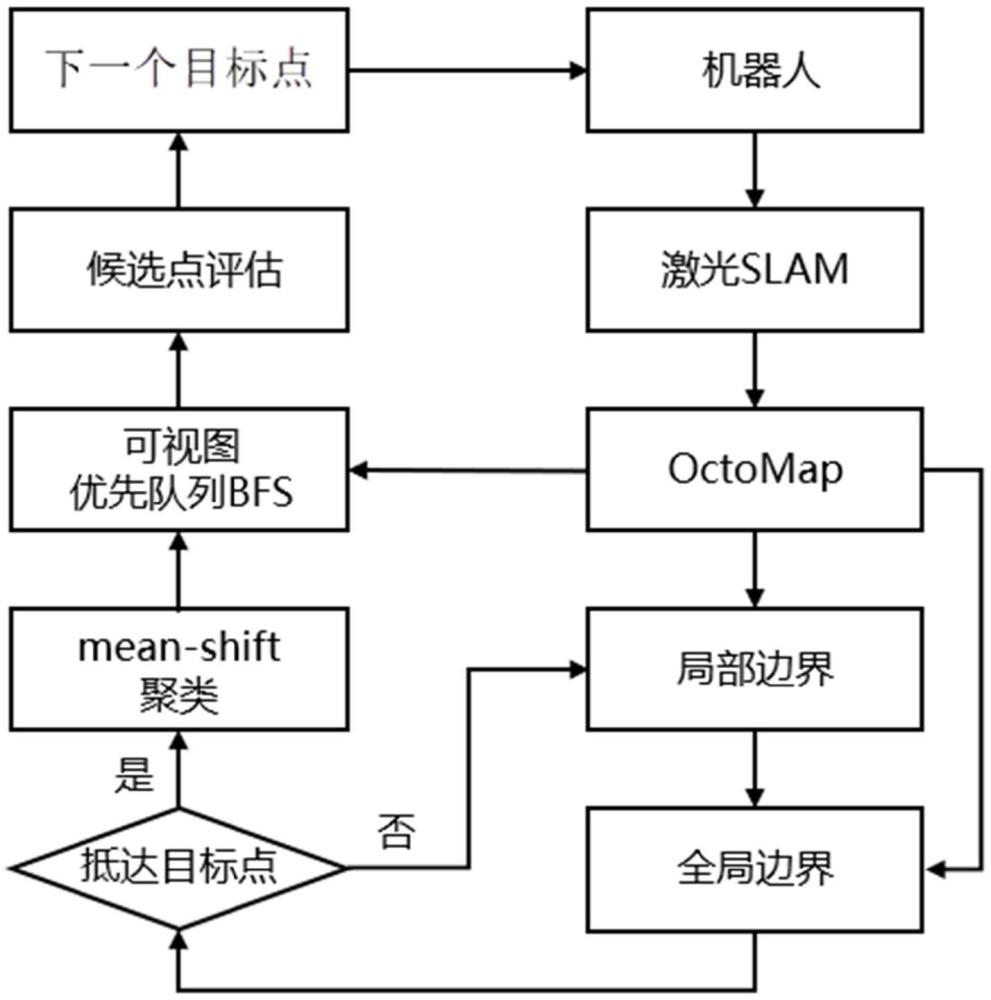
4、一种基于分层边界与可视图的自主探索方法,在机器人前往当前目标点的移动过程中,实时执行以下步骤,直到环境探索完毕:
5、基于激光slam生成的子地图点云和平移旋转矩阵,增量构建探索环境的三维地图;
6、根据三维地图中状态变化的体素,通过分层边界构建方法,实时提取局部边界,增量构建全局边界;
7、当机器人到达当前目标点后,对全局边界进行聚类,得到候选目标点集合;
8、结合可视图与优先队列bfs,对候选目标点集合进行评估,确定下一个目标点,驱动机器人前往下一个目标点。
9、进一步的,所述基于激光slam生成的子地图点云和平移旋转矩阵,具体为:
10、接收三维激光雷达回传的点云数据和imu的位姿信息,并通过激光slam算法构建子地图点云和平移旋转矩阵。
11、进一步的,所述增量构建探索环境的三维地图,具体为:
12、根据平移旋转矩阵,将子地图点云转换到世界坐标系下,通过光线追踪更新三维激光雷达位置到子地图点云中的点之间体素的状态,完成将子地图点云转换为三维地图中的体素信息,从而增量更新三维地图。
13、进一步的,所述分层边界构建方法,其中分层为局部边界和全局边界两层,具体构建方法为:
14、遍历状态变化的每一个体素,检查其是否满足边界条件,若满足则将其添加到局部边界,更新并过滤掉全局边界中不再满足边界条件的体素,然后将新提取的局部边界添加到全局边界中。
15、进一步的,所述对全局边界进行聚类,具体为:
16、采用mean-shift聚类将全局边界划分为不同的簇,每个簇中心作为一个候选目标点。
17、进一步的,所述可视图,首先将三维地图中预设范围内的体素映射成灰度图像,然后对灰度图像依次进行模糊处理、边缘检测以及膨胀处理的初步处理后,最后从初步处理后的灰度图像中提取可视顶点和可视边,构成可视图。
18、进一步的,所述对候选目标点集合进行评估,具体为:
19、基于可视图中顶点的优先级,创建优先队列;
20、使用优先队列bfs算法,从优先队列中搜索每个候选目标点对应的路径;
21、依据候选目标点对应的路径,通过实际距离代价、转向角代价和期望信息量,评估每个候选目标点的增益;
22、取增益最大的候选目标点作为最终的目标点,并驱动机器人前往该目标点。
23、本发明第二方面提供了一种基于分层边界与可视图的自主探索系统。
24、一种基于分层边界与可视图的自主探索系统,采用本发明第一方面提供的方法进行自主探索,包括地图构建模块、边界构建模块、边界聚类模块和候选评估模块:
25、地图构建模块,被配置为:基于激光slam生成的子地图点云和平移旋转矩阵,增量构建探索环境的三维地图;
26、边界构建模块,被配置为:根据三维地图中状态变化的体素,通过分层边界构建方法,实时提取局部边界,增量构建全局边界;
27、边界聚类模块,被配置为:当机器人到达当前目标点后,对全局边界进行聚类,得到候选目标点集合;
28、候选评估模块,被配置为:结合可视图与优先队列bfs,对候选目标点集合进行评估,确定下一个目标点,驱动机器人前往下一个目标点。
29、本发明第三方面提供了计算机可读存储介质,其上存储有程序,该程序被处理器执行时实现如本发明第一方面所述的一种基于分层边界与可视图的自主探索方法中的步骤。
30、本发明第四方面提供了电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的程序,所述处理器执行所述程序时实现如本发明第一方面所述的一种基于分层边界与可视图的自主探索方法中的步骤。
31、以上一个或多个技术方案存在以下有益效果:
32、本发明基于激光slam输出的子地图点云和平移旋转矩阵增量构建三维地图octomap,根据每次三维地图更新时状态发生变化的体素快速检测提取局部边界,并进一步增量提取全局边界;将全局边界通过mean-shift聚类得到候选目标点集合,通过多边形近似和动态滑动窗口对障碍物轮廓点抽稀,减少冗余信息构建可视图;在可视图基础上使用优先队列bfs,综合期望信息量和移动代价,评估候选目标点并选择目标点,驱动机器人完成对未知环境的探索。
33、本发明能够在机器人移动过程中快速实时高效的检测提取边界,并且边界是增量构建的,提高提取效率的同时减少了存储成本;采用mean-shift聚类具有更高的适应性,防止遗漏边界忽略地图角落;通过多边形近似和动态滑动窗口对障碍物轮廓点抽稀,减少了可视图中冗余信息,减少图的存储和搜索成本;使用可视图与优先队列bfs计算候选目标点移动代价,采用综合指标评估候选目标点,保证目标点探索价值高,提高了轨迹质量,保证机器人高效率的完成对未知环境的探索覆盖。
34、本发明附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!