高精导航图线状要素智能自适追索生成方法、装置及设备与流程
本发明涉及电子地图领域,尤其是涉及一种高精导航图线状要素智能自适追索生成方法、装置及设备。
背景技术:
1、高精度地图的线状要素是在辅助驾驶、自动驾驶和无人驾驶等智能座驾所使用的地图中的表述车道、道路及其相关信息的线状地物,其精度可以达到厘米级甚至更高。与传统的导航地图线状要素相比,高精度地图线状要素有更多种类,也更加精准,还增加了高程数据以表达路面的起伏,为智能座驾系统提供更精细、更准确的环境信息。
2、目前,相关技术中通常采用人工绘制、基于点云信息的自动绘制、基于深度学习的自动识别等方式,对高精度地图的线状要素进行追踪。但是,人工绘制方案对作业员的要求较高,而且绘制过程枯燥而持续;基于点云信息的自动绘制方案往往较慢且需要大量辅助人工修正,因为容易出现地物绘制不完整,且出现重复绘制和地物特点把控不完整的问题;基于深度学习的自动识别方案需要提前大量的样本准备,且程序要有较长时间的预先学习的时间成本,且对未经学习的要素不能识别或错误识别。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种高精导航图线状要素智能自适追索生成方法、装置及设备,可以显著降低人工参与的工作量,可以有效降低线状要素追索的前期准备工作,从而提高线状要素追索的整体效率,同时还可以有效提高线状要素追索的精度。
2、第一方面,本发明实施例提供了一种高精导航图线状要素智能自适追索生成方法,包括:
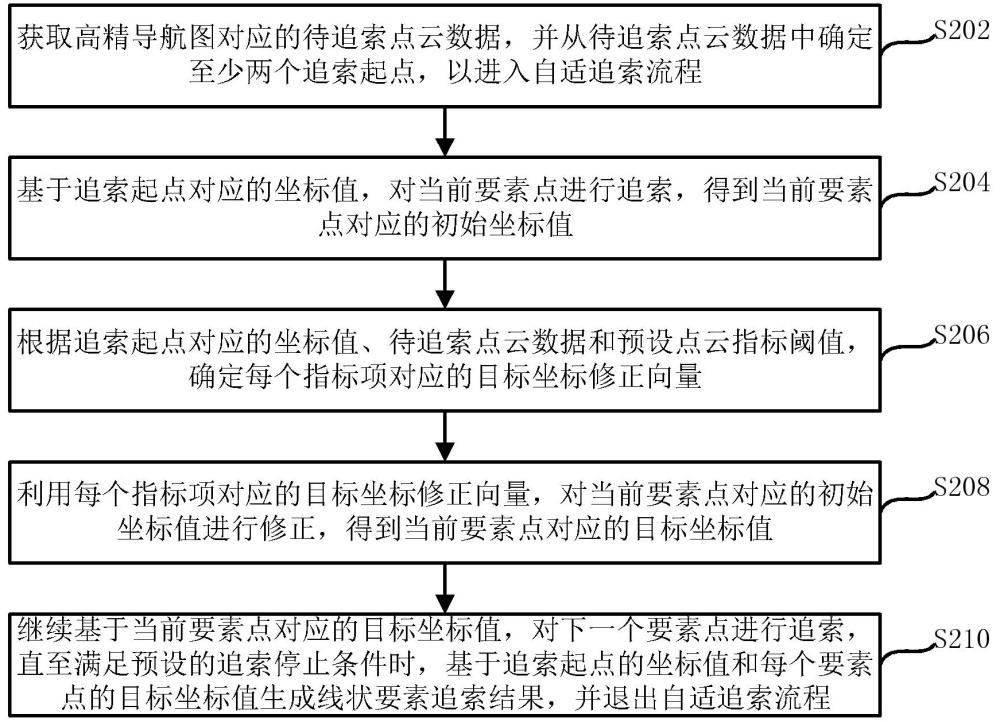
3、获取高精导航图对应的待追索点云数据,并从所述待追索点云数据中确定至少两个追索起点,以进入自适追索流程;
4、基于所述追索起点对应的坐标值,对当前要素点进行追索,得到所述当前要素点对应的初始坐标值;
5、根据所述追索起点对应的坐标值、所述待追索点云数据和预设点云指标阈值,确定每个指标项对应的目标坐标修正向量;
6、利用每个所述指标项对应的所述目标坐标修正向量,对所述当前要素点对应的所述初始坐标值进行修正,得到所述当前要素点对应的目标坐标值;
7、继续基于所述当前要素点对应的所述目标坐标值,对下一个要素点进行追索,直至满足预设的追索停止条件时,基于所述追索起点的坐标值和每个所述要素点的目标坐标值生成线状要素追索结果,并退出所述自适追索流程。
8、在一种实施方式中,根据所述追索起点对应的坐标值、所述待追索点云数据和预设点云指标阈值,确定每个指标项对应的目标坐标修正向量的步骤,包括:
9、根据所述追索起点对应的坐标值和预设点云指标阈值,从所述待追索点云数据中提取每个指标项对应的第一目标点云数据,并基于所述第一目标点云数据中每个点的坐标值,确定每个所述指标项对应的第一重心点;
10、基于所述追索起点和每个所述指标项对应的所述第一重心点,确定每个所述指标项对应的初始坐标修正向量;
11、对于每个所述指标项,将该指标项对应的所述初始坐标修正向量的均值,作为该指标项对应的目标坐标修正向量。
12、在一种实施方式中,根据所述追索起点对应的坐标值和预设点云指标阈值,从所述待追索点云数据中提取每个指标项对应的第一目标点云数据,并基于所述第一目标点云数据中每个点的坐标值,确定每个所述指标项对应的第一重心点的步骤,包括:
13、以所述追索起点对应的坐标值为球心,基于预设球半径从所述待追索点云数据中提取初始点云数据;
14、对于每个指标项,如果所述初始点云数据内的点针对于该指标项的值位于预设点云指标阈值外,则将该点从所述初始点云数据中剔除,以得到该指标项对应的第一目标点云数据;
15、将所述第一目标点云数据中每个点的坐标值的均值,作为该指标项对应的第一重心点。
16、在一种实施方式中,基于所述追索起点和每个所述指标项对应的所述第一重心点,确定每个所述指标项对应的初始坐标修正向量的步骤,包括:
17、对于每个所述指标项,构造从该指标项对应的所述第一重心点指向所述追索起点的初始坐标修正向量。
18、在一种实施方式中,利用每个所述指标项对应的所述目标坐标修正向量,对所述当前要素点对应的所述初始坐标值进行修正,得到所述当前要素点对应的目标坐标值的步骤,包括:
19、根据所述当前要素点对应的所述初始坐标值和预设点云指标阈值,从所述待追索点云数据中提取每个指标项对应的第二目标点云数据,并基于所述第二目标点云数据中每个点的坐标值,确定每个所述指标项对应的第二重心点;
20、基于每个所述指标项对应的所述目标坐标修正向量和所述第二重心点,所述当前要素点针对于每个所述指标项的偏移后坐标值;
21、将所述当前要素点针对于每个所述指标项的偏移后坐标值的均值,作为第三重心点和所述第三重心点对应的坐标值;
22、根据所述第三重心点对应的坐标值,确定所述第三重心点与所述待追索点云数据中每个点之间的距离,以基于所述距离从所述待追索点云数据中,确定当前要素点及所述当前要素点对应的目标坐标值。
23、在一种实施方式中,基于每个所述指标项对应的所述目标坐标修正向量和所述第二重心点,所述当前要素点针对于每个所述指标项的偏移后坐标值的步骤,包括:
24、对于每个所述指标项,构造从该指标项对应的所述第二重心点指向所述初始坐标值的待修正向量;
25、利用该指标项对应的所述目标坐标修正向量,对该指标项对应的所述待修正向量进行偏移,以得到所述当前要素点针对于该指标项的偏移后坐标值。
26、在一种实施方式中,继续基于所述当前要素点对应的所述目标坐标值,对下一个要素点进行追索的步骤,包括:
27、将当前要素点作为新的追索起点;以及根据所述追索起点与所述当前要素点之间的相对位置关系,从所述追索起点中确定至少一个新的追索起点;
28、基于新的追索起点对应的坐标值,对下一个要素点进行追索。
29、在一种实施方式中,从所述待追索点云数据中确定至少两个追索起点,以进入自适追索流程的步骤,包括:
30、如果所述追索起点的数量为2个,且接收到人工绘制结束消息,则进入所述自适追索流程;
31、如果所述追索起点的数量为3个,则进入所述自适追索流程。
32、第二方面,本发明实施例还提供一种高精导航图线状要素智能自适追索生成装置,包括:
33、起点确定模块,用于获取高精导航图对应的待追索点云数据,并从所述待追索点云数据中确定至少两个追索起点,以进入自适追索流程;
34、初始坐标值确定模块,用于基于所述追索起点对应的坐标值,对当前要素点进行追索,得到所述当前要素点对应的初始坐标值;
35、修正向量确定模块,用于根据所述追索起点对应的坐标值、所述待追索点云数据和预设点云指标阈值,确定每个指标项对应的目标坐标修正向量;
36、目标坐标值确定模块,用于利用每个所述指标项对应的所述目标坐标修正向量,对所述当前要素点对应的所述初始坐标值进行修正,得到所述当前要素点对应的目标坐标值;
37、结果确定模块,用于继续基于所述当前要素点对应的所述目标坐标值,对下一个要素点进行追索,直至满足预设的追索停止条件时,基于所述追索起点的坐标值和每个所述要素点的目标坐标值生成线状要素追索结果,并退出所述自适追索流程。
38、第三方面,本发明实施例还提供一种电子设备,包括处理器和存储器,所述存储器存储有能够被所述处理器执行的计算机可执行指令,所述处理器执行所述计算机可执行指令以实现第一方面提供的任一项所述的方法。
39、本发明实施例提供的一种高精导航图线状要素智能自适追索生成方法、装置及设备,首先获取高精导航图对应的待追索点云数据,并从待追索点云数据中确定至少两个追索起点,以进入自适追索流程;然后基于追索起点对应的坐标值,对当前要素点进行追索,得到当前要素点对应的初始坐标值;以及根据追索起点对应的坐标值、待追索点云数据和预设点云指标阈值,确定每个指标项对应的目标坐标修正向量;再利用每个指标项对应的目标坐标修正向量,对当前要素点对应的初始坐标值进行修正,得到当前要素点对应的目标坐标值;继续基于当前要素点对应的目标坐标值,对下一个要素点进行追索,直至满足预设的追索停止条件时,基于追索起点的坐标值和每个要素点的目标坐标值生成线状要素追索结果,并退出自适追索流程。上述方法利用简单的人工操作确定出至少两个追索起点,并在追踪起点的基础上进入自适追索流程,即可自动地对要素点及其坐标值进行追索,本发明实施例通过确定当前要素点对应的初始坐标值,并利用目标坐标修正向量对其进行修正的方式,得到当前要素点的目标坐标值,循环这一过程,即可得到精度较高的线状要素追索结果,本发明实施例可以显著降低人工参与的工作量,可以有效降低线状要素追索的前期准备工作,从而提高线状要素追索的整体效率,同时还可以有效提高线状要素追索的精度。
40、本发明的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
41、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!