一种建筑墙体倾斜实时监测报警系统的制作方法
本发明涉及一种在线监测墙体倾斜状态的技术,属于图像处理领域。
背景技术:
1、建筑物墙体在施工和使用过程中会采用监测仪器对各项关键指标进行监测,从而确保施工的安全性和保障施工过程的合理性。当建筑物墙体与地面的夹角达到建筑设计指标极限以上时,建筑物墙体会存在倾斜坍塌的安全隐患。因此,在建筑施工过程中需要对建筑物墙体的垂直度进行监测,从而判断建筑墙体的倾斜情况。现有的部分墙体倾斜检测装置在检测时需要将监测装置直接与建筑墙体接触,且检测结果受限于建筑物墙体地面的水平情况,不能根据不同的待检测墙体环境进行监测,大大降低了检测效果和检测使用范围。专利授权公告为cn2123363793u的专利公布了一种建筑检测用建筑倾斜警示装置,该装置通过检测墙体不同高度位置与激光测距仪之间的水平距离来判别墙体是否倾斜,但由于墙体外表面一般是凹凸不平的,对不同高度位置进行测距时,因其平整度的原因会造成激光测量距结果误差大,激光测距仪在测距过程中很容易误报,从而导致墙体倾斜角度的检测结果不精准,且需要使用人员实时查看,操作不便利。专利公布号为cn115014287a的专利公布了一种监测建筑物倾斜报警装置,该装置需要水平装配在墙体底部,通过转板与墙体贴合,当转板处于倾斜状态,装置的滑杆随之发生倾斜,工作人员根据滑杆的状态来判断墙体是否倾斜,但由于检测环境的差异,地面不平整会导致检测装置不能保持水平,且无法适配不同高度的待检测墙体,不能实现对倾斜角度的实时数据可视化监测。
技术实现思路
1、针对现有倾斜检测装置检测结果不精准、适用范围受限和无法实现倾斜数据可视化监测的问题,本发明提供一种建筑墙体倾斜实时监测报警系统。
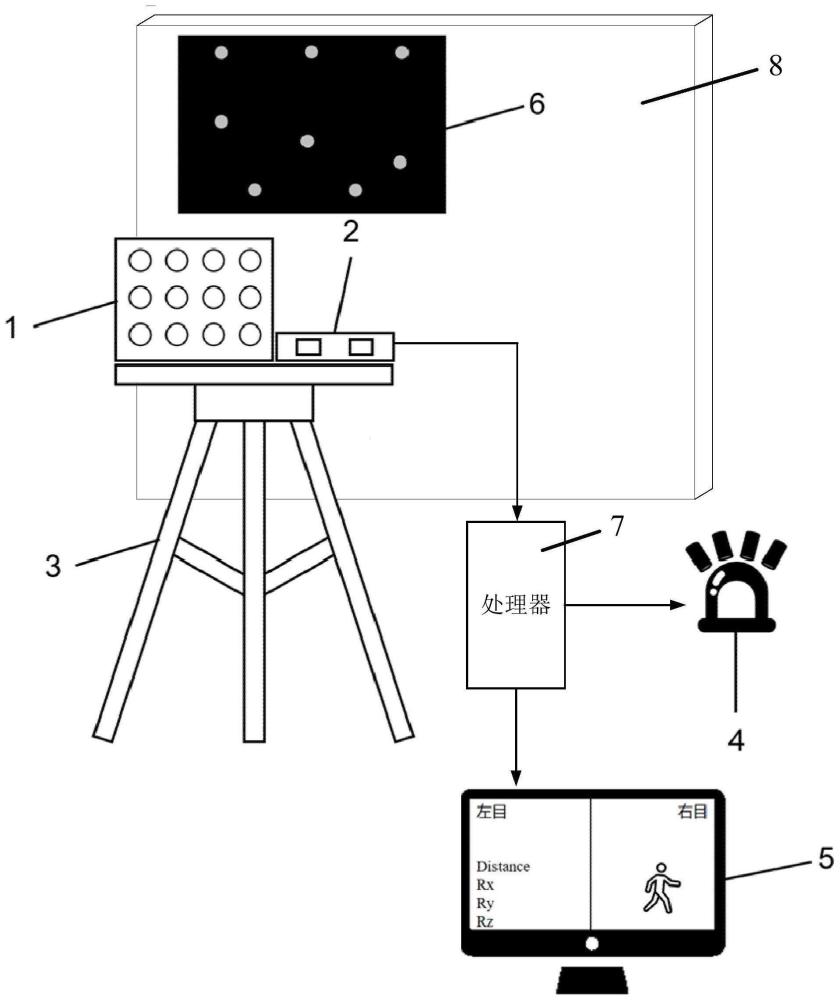
2、本发明所述一种建筑墙体倾斜实时监测报警系统,包括视觉成像单元、处理器7、报警器4和显示器5,视觉成像单元包括靶标板6和双目相机2;
3、靶标板6贴合设置于建筑墙体8表面,双目相机2设置在建筑墙体8前方,且双目相机2的光轴保持水平,双目相机2的左目采集靶标板6的图像信息发送给处理器7,处理器7根据靶标板6图像信息进行位姿解算并获取墙体倾斜角度;双目相机2的右目采集是否有行人从建筑墙体8前通过的图像信息并发送给处理器7,墙体倾斜角度超过预警角度并有行人通过时,处理器7通过报警器4进行报警;
4、处理器7将左目墙体倾斜角度及右目行人状态在显示器5上分屏显示。
5、优选地,视觉成像单元还包括三角支架3,双目相机2放置在三角支架3上,三角支架3用于调整双目相机2的光轴保持水平。
6、优选地,视觉成像单元还包括红外探照光源1,红外探照光源1用于辅助双目相机2在夜间获取夜视图像。
7、优选地,靶标板6安装范围在双目相机2的相机视场内,靶标板6的水平和垂直方向平移范围:
8、
9、
10、其中,d为双目相机2到建筑墙体8的距离,lxy为靶标板6对角线尺寸,fovx为相机水平视场角,fovy为相机垂直视场角。
11、优选地,靶标板6主体为哑光高强度碳纤维板,靶标板6上设置8个靶标点,靶标点由高强度回归反射性玻璃微珠海事膜裁剪而成,8个靶标点的布局为:
12、8个靶标点构建三个固定的交比组合,三个交比组合为冗余设置;
13、第一个交比组合布局:点1、点2、点3从左上向右下倾斜共线设置,该共线三点的两侧设置点4、点5,且点4、点5连线与点1、点2连线交于点p,则共线的点1、点p、点2、点3构成固定的交比组合,满足关系式:
14、
15、其中,cr1和第一个交比组合的交比,l21表示点1、点2之间的距离,lp3表示点p、点3之间的距离,lp2表示点2、点p之间的距离,l31表示点1、点3之间的距离;
16、第二个交比组合布局:点1、点2、点3从左上向右下倾斜共线设置,该共线三点的两侧设置点4、点7,且点4、点7连线与点1、点2连线交于点q,则共线的点1、点q、点2、点3构成固定的交比组合,满足关系式:
17、
18、其中,cr2和第二个交比组合的交比,lq3表示点q、点3之间的距离,lq2表示点1、点q之间的距离;
19、第三个交比组合布局:点5、点2、点8从左上向右下倾斜共线设置,点5位于点1下方,该共线三点的两侧设置点3、点6,且点3、点6连线与点2、点8连线交于点r,则共线的点5、点2、点r、点8构成固定的交比组合,满足关系式:
20、
21、其中,cr3和第三个交比组合的交比,l28表示点2、点8之间的距离,lr5表示点r、点5之间的距离,lr2表示点2、点r之间的距离,l58表示点5、点8之间的距离。
22、优选地,处理器7根据靶标板6图像信息进行位姿解算并获取墙体倾斜角度的过程为:
23、s1、双目相机2的左目采集靶标板6上靶标点的图像信息;
24、s2、识别出三个冗余设置中的任意一个交比组合涉及的靶标点;
25、s3、将该交比组合涉及的靶标点在靶标板识别坐标系下的物理坐标、在图像坐标下的图像坐标输入至opencv中的epnp函数中,以获取俯仰角rx、偏航角ry、滚转角rz和双目相机2与建筑墙体的实际距离distance,俯仰角rx作为建筑墙体倾斜角度。
26、优选地,s2中识别一个交比组合的靶标点,三个交比组合为冗余设置,当一个交比组合的靶标点识别受到外界环境光干扰过大的情况时,改为识别两个或三个交比组合的靶标点,以增强靶标点识别的抗干扰性。
27、优选地,s2中识别出三个冗余设置中的任意一个交比组合涉及的靶标点,以识别第一个交比组合为例说明识别过程:
28、s21、从图像信息中找到共线点1、点2、点3,交点p位于点1、点2之间,根据靶标点设置规则及共线点1、点2、点3识别出该图像中点1、点p、点2、点3位置在靶标板识别坐标系的坐标;
29、定义靶标板识别坐标系:点1指向点3的矢量为正x方向,正y方向为点1指向左下方向;
30、定义图像坐标系:图像坐标系u轴与靶标板识别坐标系0位姿时的x轴平行,图像坐标系v轴与靶标板识别坐标系0位姿下的y轴平行;所述0位姿指靶标板6与水平面垂直时的位姿;
31、s22、点4、点5未区分前,利用任一个点在靶标板识别坐标系的坐标作为点4坐标,则当前时刻采集图像的点4对应图像坐标系下坐标(u‘4,v’4)按下式获取:
32、u′4=(u4-u1)cosα+(v4-v1)sinα
33、v′4=(v4-v1)cosα+(u4-u1)sinα
34、其中(u4,v4),(u1,v1)分别为点1和点4在0位姿时图像坐标系下的坐标,α为靶标识别坐标系x轴与图像坐标系u轴夹角,cosα、sinα按下式获取
35、
36、
37、其中(u2,v2)为点2在0位姿时图像坐标系下的坐标;
38、s23、判断v′4的正负,若v′4为正,当前点为点4,另一点为点5;若v′4为负,当前点为点5,另一点为点4;完成第一个交比组合全部靶标点的识别。
39、优选地,步骤s3的具体过程为:调用opencv中的epnp函数:
40、bool solvepnp(inputarray objectpoints,
41、inputarray imagepoints,
42、inputarray cameramatrix,
43、inputarray distcoeffs,
44、outputarray rvec,outputarray tvec,
45、bool useextrinsicguess=false,int flags=solvepnp_iterative);
46、输入参数包括objectpoints、imagepoints、cameramatrix和distcoeffs,
47、其中,objectpoints指某一交比组合中全部靶标点在靶标板识别坐标系下的坐标;
48、imagepoints指同一交比组合中合部靶标点对应的在图像坐标系下的坐标;
49、cameramatrix指3×3的相机内参矩阵;
50、distcoeffs指相机畸变系数数组;
51、输出参数包括rvec和tvec,
52、其中,rvec为相机坐标系下靶标的3×3三轴旋转矩阵r的旋转向量;
53、tvec相机坐标系下靶标的3x1三轴平移矩阵t的平移向量;
54、旋转向量和平移向量合并用于表达靶标板识别坐标系的位姿;
55、从旋转向量构成的旋转矩阵中解算出俯仰角rx、偏航角ry、滚转角rz,以俯仰角ry作为建筑墙体倾斜角度;
56、从平移向量构成的平移矩阵解算出三个相对于0位姿的x方向矢量平移tx、y方向矢量平移ty、z方向矢量平移tz,进而获取当前状态下双目相机(2)与墙体的实际距离
57、本发明的有益效果:
58、本发明所述一种建筑墙体倾斜实时监测报警系统结构紧凑,使用便捷,采用非接触式的双目视觉,白天和晚上都可以精准测量出墙体的倾斜角度,本发明将靶标板贴合墙体安装,靶标板的角度即表征墙体角度,通过对墙体上靶标板图像进行实时采集,根据设计好的靶标点进行识别,从而准确测距及获取墙体倾斜角,当倾斜角度大于设置的预警示角度时声光报警器会发出报警提示,便于对墙体倾斜角度进行实时监测和警示,大大提升了墙体倾斜的检测效果,满足相关人员的使用需求。
59、此外,本发明提供的一种建筑墙体倾斜实时监测报警系统除了应用在建筑工地的危险墙体监测,还可适用于地质工作现场容易发生倾倒的危险边坡、岩体、土体以及工程施工现场的大型机械倾斜倒塌监测。
- 还没有人留言评论。精彩留言会获得点赞!