基于云边端协同的配电台区全时空故障检测方法及系统与流程
本发明属于配电台区,具体涉及基于云边端协同的配电台区全时空故障检测方法及系统。
背景技术:
1、配电台区作为面向电力用户供电的核心单元与智能中枢,其安全、稳定运行支撑着营销、控制、调度等各类电力业务顺利进行。然而,随着跨系统交互的迅速发展,配电台区难以支撑海量数据随时随地接入,且台区运行过程中易受天气等因素影响而出现一系列故障问题,台区运行的安全性需要得到保障。云边端协同作为近年来应用广泛的智能体系,能够充分利用云与边优势互补,实现配电台区故障快速、准确检测。因此,迫切需要设计一种基于云边端协同的配电台区全时空故障检测方法及系统,考虑台区内各终端空间与时间重要度,构建时序数据以检测台区各故障发生概率,同时采用云边轮流主导的方式对全时空检测模型进行更新,提升模型时效性,及时对故障终端进行检测,避免造成台区电力系统瘫痪而导致更大的隐患发生。
2、现有的台区故障检测方法仍然存在以下两个缺点:一是未考虑采用全时空数据进行故障检测,只考虑电气量、电能量等有限数据,并忽略了各终端数据的时间与空间重要度。二是只考虑单一的边缘主导或云端主导的模型定期更新方法,无法充分利用本地以及其他边缘模型的信息及时进行模型更新,使得模型的检测准确率过低、检测时延过高。
3、因此,亟需设计一种基于云边端协同的配电台区全时空故障检测方法及系统,充分考虑全时空故障检测模型构建,采用云边轮流主导的故障模型更新方法,有效提升配电台区故障检测的精度与效率。
技术实现思路
1、本发明所为了解决背景技术中存在的技术问题,目的在于提供了基于云边端协同的配电台区全时空故障检测方法及系统。
2、为了解决技术问题,本发明的技术方案是:
3、基于云边端协同的配电台区全时空故障检测方法,所述方法包括:
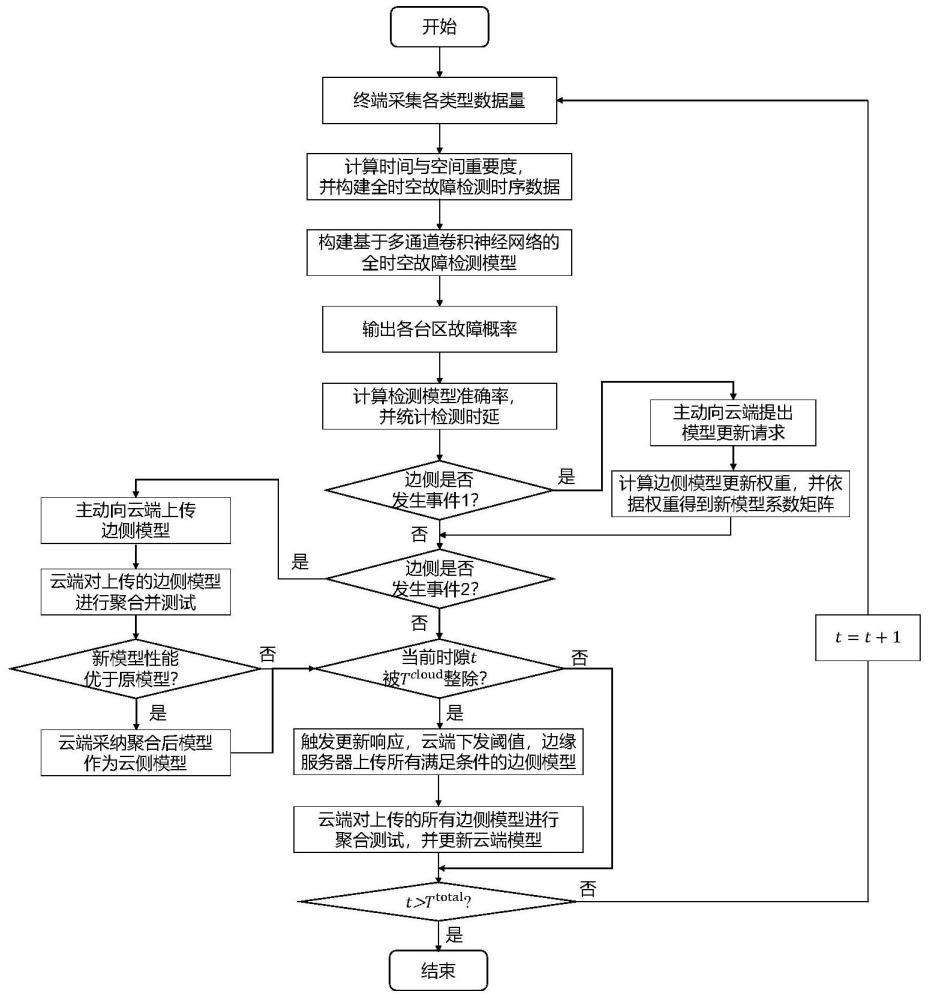
4、s1:构建全时空故障检测模型,利用预设的样本库数据对网络参数进行训练,所述模型输入为全时空故障检测时序数据,输出为台区故障发生概率,计算模型的准确率并统计故障检测时延;
5、s2:将检测准确率及检测时延与设定阈值进行比较,判断边侧是否发生第一事件,若发生,计算边侧全时空故障检测模型更新权重,并根据权重得到新模型系数矩阵,进入步骤s3,若未发生直接进入步骤s3;
6、s3:判断边侧是否发生第二事件,若发生,对上传的模型进行聚合并测试,计算原始模型与聚合模型的准确率与检测时延,若新模型性能优于原始模型,则利用聚合后模型作为云侧全时空故障检测模型,然后判断当前时隙是否能被总优化时间长度整除,若新模型性能不优于原始模型,直接利用原始模型作为云侧全时空故障检测模型,并直接判断当前时隙是否能被总优化时间长度整除;
7、s4:若能,则触发更新响应,下发阈值,上传满足阈值条件的边侧全时空故障检测模型,对所有上传模型进行聚合并测试,若聚合后模型性能更优,则利用聚合后模型作为云侧全时空故障检测模型,然后判断当前时隙是否大于总优化时间长度,若不能,则直接判断。
8、进一步,在所述步骤s1之前,所述方法还包括:进行电气量、电能量、状态量及环境量采集,考虑台区内各终端地理位置及采集数据时效性,计算各台区时间重要度与各终端空间重要度根据数据采纳比构建各台区全时空故障检测数据集合
9、进一步,在所述步骤s4之后,所述方法还包括:
10、判断当前时隙t是否大于总优化时间长度ttotal,若达到ttotal,则结束故障检测,若未达到则重复步骤s1-s4。
11、进一步,所述步骤s1具体包括:
12、基于多通道卷积神经网络的全时空故障检测模型中所提的多通道卷积神经网络包括两条通道,分别为时间时序数据通道和空间时序数据通道,二者均以全时空故障检测时序数据集合作为输入;时间时序数据通道权重系数为a,包含卷积层、池化层、时间通道注意力模块;空间时序数据通道权重系数为b,包含卷积层、池化层、空间通道注意力模块;
13、时间通道注意力模块利用全局平均池化和全局随机池化将输入的全时空故障检测时序数据集合分别提取出2个特征矩阵令两者相加取平均值,然后采取一维卷积的形式计算全时空故障检测时序数据的时间特征值,可表示为:
14、
15、其中,为经过时间通道注意力模块后输出的全时空故障检测时序数据时间特征值;分别代表平均池化和随机池化后的全时空故障检测时序数据时间特征矩阵;sig(·)代表sigmoid函数;con(·)代表卷积操作;r代表卷积核大小;代表平均池化和随机池化取平均后的全时空故障检测时序数据时间特征矩阵;
16、空间通道注意力模块利用全局平均池化和全局随机池化将输入的全时空故障检测时序数据集合分别提取出2个特征矩阵令两者相加取平均值,然后采取一维卷积的形式计算全时空故障检测时序数据的空间特征值,可表示为:
17、
18、其中,为经过空间通道注意力模块后输出的全时空故障检测时序数据空间特征值;分别代表平均池化和随机池化后的全时空故障检测时序数据空间特征矩阵;代表平均池化和随机池化取平均后的全时空故障检测时序数据空间特征矩阵;
19、得到全时空故障检测时序数据时间与空间特征向量后,通过特征拼接、通道混洗、卷积得到基于多通道卷积神经网络的全时空故障检测模型,利用样本库数据对网络参数进行训练,在输出误差满足精度要求后,将训练好的模型搭载于边缘服务器上,该模型输入为全时空故障检测时序数据集合,输出为台区故障发生概率zi(t)。
20、进一步,所述步骤s2包括:
21、边侧主导的模型更新基于事件触发机制,将检测准确率ηi(t)以及检测时延δi(t)与设定阈值进行比较,当结果满足事件触发条件时触发响应;边侧判断是否发生第一事件,即ηi(t)<ζmin orδi(t)>τmax,发生时计算边侧全时空故障检测模型更新权重,并依据权重得到新模型系数矩阵,否则,进入步骤s3。
22、进一步,所述步骤s3包括:
23、边侧判断是否发生第二事件,即ηi(t)>ζmin andδi(t)<τmax,发生时主动上传当前边侧全时空故障检测模型ci,对上传的模型ci进行聚合并测试,计算原模型与聚合模型的准确率与检测时延,若新模型性能优于原模型,则利用聚合后模型作为云侧全时空故障检测模型,进入步骤s4;若第二事件未发生,直接进入步骤s4。
24、进一步,所述步骤s4包括:
25、判断当前时隙t是否能被tcloud整除,若能,则触发更新响应,下发云侧设定阈值上传满足阈值条件的边侧全时空故障检测模型,对所有上传模型进行聚合并测试,若聚合后模型性能更优,则采纳聚合后模型作为云侧全时空故障检测模型。
26、进一步,所述步骤s2和s3具体包括:
27、计算当前边侧全时空故障检测模型的检测准确率ηi(t),并统计检测时延δi(t);
28、设定边缘模型准确率阈值上下限分别为ζi,max和ζi,min,检测时延阈值上下限分别为τi,max和τi,min,将模型的检测准确率ηi(t)和检测时延δi(t)分别与准确率阈值下限ζi,min、检测时延上限τi,max作比较,根据比较结果判断事件发生情况,当事件发生时触发相应的响应结果;
29、确定第一事件为ηi(t)<ζi,min orδi(t)>τi,max,即当前模型准确率低于ζi,min或检测时延高于τi,max,第一事件发生时触发更新动作,边缘服务器向云端提出模型更新请求,依据云端下发的最新全时空故障检测模型对边侧全时空故障检测模型进行更新,采用软更新的方式,首先,根据检测准确率偏差和检测时延偏差计算边侧全时空故障检测模型的更新权重,其次,依据权重计算台区边侧全时空故障检测模型各系数与云侧全时空故障检测模型各系数的加权和,得到新模型的系数矩阵,表示为:
30、ci=(1-κ1)ci+κ1ccloud (13)
31、其中,ci为边侧全时空故障检测模型系数矩阵;ccloud为云端最新的全时空故障检测模型系数矩阵;κ1为边侧全时空故障检测模型的更新权重,计算如下:
32、
33、其中,若边侧全时空故障检测模型的检测准确率ηi(t)不高于ζi,min/2或检测时延δi(t)不低于2τi,max,则更新系数κ1=1,表示完全采纳云侧全时空故障检测模型;反之检测准确率和检测时延满足ηi(t)>ζi,min/2andδi(t)<2τi,max,此时选择软更新的方式,式中(ζi,min-ηi(t))/(ζi,min/2)∈[0,1)且(δi(t)-τi,max)/τi,max∈[0,1),当检测准确率ηi(t)越高,检测时延δi(t)越低,κ1的值越小,对边侧全时空故障检测模型的保留越多;θ1为边侧检测准确率偏差系数,θ2为边侧检测时延偏差系数,且θ1+θ2=1,表示模型对于检测准确率和检测时延的性能需求,通常情况θ1=θ2=1/2,对模型检测准确率要求很高时可以增加θ1的值、减小θ2的值;
34、确定第二事件为ηi(t)>ζi,max andδi(t)<τi,min,即当前模型检测准确率高于ζi,max且检测时延低于τi,min,第二事件发生时触发上传动作,边缘服务器主动向云端上传当前边侧全时空故障检测模型;云服务器根据上传的边侧全时空故障检测模型进行云侧全时空故障检测模型聚合,得到云侧聚合模型的系数矩阵,表示为:
35、cnew=κ2ci+(1-κ2)ccloud (15)
36、其中,cnew为云侧聚合模型的系数矩阵,ci为台区i边缘服务器最新上传的全时空故障检测模型的系数矩阵,ccloud为云端最新的全时空故障检测模型的系数矩阵,κ2为云侧全时空故障检测模型的更新权重;
37、得到云侧聚合模型的系数矩阵后,云端分别计算原模型与聚合模型的准确率与检测时延,若新模型准确率高于原模型,且检测时延低于原模型,则云端采纳聚合后模型作为云侧全时空故障检测模型。
38、进一步,所述步骤s4具体包括:
39、设定云端更新周期为tcloud,如果当前时隙t能被tcloud整除,云端触发更新响应,将云侧设定阈值下发至边缘,边缘服务器上传满足阈值条件的边侧全时空故障检测模型,设上传的边侧全时空故障检测模型系数矩阵集合为cset,若ci∈cset,表示ci为台区i边缘服务器最新上传的全时空故障检测模型的系数矩阵,云服务器根据集合cset依次进行云侧全时空故障检测模型聚合,得到云侧聚合模型的系数矩阵,表示为:
40、cnew=κ3ci+(1-κ3)ccloud (16)
41、其中,cnew为云侧聚合模型的系数矩阵,ci为台区i边缘服务器上传的全时空故障检测模型的系数矩阵,ccloud为云端最新的全时空故障检测模型的系数矩阵,κ3为云侧聚合模型的更新权重,能够避免云侧聚合模型更新过程中过多单一采用边侧上传的检测模型,κ3的计算如下:
42、
43、其中,为云侧模型检测准确率阈值上限,为云侧模型检测时延阈值下限,为云侧聚合模型的更新权重阈值,θ3为云侧检测准确率偏差系数,θ4为云侧检测时延偏差系数,且θ3+θ4=1,表示模型对于检测准确率和检测时延的性能需求,通常情况θ3=θ4=1/2,对模型检测准确率要求很高时可以增加θ3的值、减小θ4的值;
44、得到云侧聚合模型系数矩阵后,云端分别计算原模型与聚合模型的准确率与检测时延,若新模型准确率高于原模型,且检测时延低于原模型,则云端采纳聚合后模型作为云侧全时空故障检测模型,即ccloud=cnew;
45、云侧全时空故障检测模型更新完毕后,若还存在未处理的边侧全时空故障检测模型,重复上述步骤,直到得到最终的云侧全时空故障检测模型,基于周期触发机制的响应结束。
46、基于云边端协同的配电台区全时空故障检测系统,其特征在于,所述系统应用于上述中任一所述的基于云边端协同的配电台区全时空故障检测方法,所述系统包括:部署在终端上的数据采集模块、部署在边缘服务器上的全时空故障检测时序数据构建模块、全时空故障检测模型构建模块、准确率与检测时延计算模块、事件触发模块和部署在云端服务器上的周期触发模块、准确率与检测时延计算模块、云端模型更新模块和故障检测判断模块;
47、所述数据采集模块:对台区内电气量、电能量、状态量和环境量进行采集,并上传至全时空故障检测时序数据构建模块;
48、所述全时空故障检测时序数据构建模块:考虑台区内各终端地理位置、采集数据时效性影响因素,计算各终端空间重要度与时间重要度,依据数据时间与空间采纳比分别得到时间与空间故障检测数据集合,构建全时空故障检测时序数据集合,并将所构建的数据集合输入全时空故障检测模型构建模块;
49、所述全时空故障检测模型构建模块:基于多通道轻量化的卷积神经网络构建全时空故障检测模型,利用样本库数据对网络参数进行训练,在输出误差满足精度要求后,将训练好的模型搭载于边缘服务器和云端服务器上,该模型输入为全时空故障检测时序数据构建模块所得到的全时空故障检测时序数据,输出为台区故障发生概率,并将输出结果输入至边缘服务器和云端服务器的准确率与检测时延计算模块;
50、所述准确率与检测时延计算模块:准确率与检测时延计算模块分别部署于边缘服务器与云端服务器上,基于全时空故障检测模型构建模块输出结果对边侧与云端的全时空故障检测模型的准确率进行计算,并统计故障检测时延,将其传输至边缘服务器事件触发模块与云端服务器云端模型更新模块;
51、所述事件触发模块:部署在边缘服务器上,基于设定事件触发边侧主导模型更新;当发生第一事件时,边缘服务器向云端提出更新请求,进行边侧全时空故障检测模型更新;发生第二事件时,边缘服务器主动上传边侧全时空故障检测模型至云端周期触发模块;两事件均未发生时,返回数据采集模块重新采集数据;
52、所述周期触发模块:部署于云端服务器上的周期触发模块定期触发更新响应,将云侧设定阈值下发至边缘服务器,并接收边缘服务器上传的满足云侧设定阈值条件的边侧全时空故障检测模型;
53、所述云端模型更新模块:分别计算云侧全时空故障检测模型与云侧聚合模型的准确率与检测时延,若云侧聚合模型检测准确率高于云侧全时空故障检测模型,且云侧聚合模型检测时延低于云侧全时空故障检测模型,则云端采纳云侧聚合模型作为最新的云侧全时空故障检测模型,否则不更新;
54、所述故障检测判断模块:云边轮流主导的模型更新结束后,故障检测判断模块判断当前时隙是否大于优化总时隙,若大于则结束故障检测,否则继续。
55、与现有技术相比,本发明的优点在于:
56、(1)本发明提出基于云边端协同的全时空故障检测模型构建方法。台区内各终端对台区电气量、电能量、状态量、环境量进行采集并上传至边缘服务器,在考虑数据时效性与终端地理位置的基础上,计算各台区时间重要度与各终端空间重要度,并根据数据时间与空间采纳比选取高新鲜度、高重要度的采集数据构建全时空故障检测时序数据。此外,考虑空间时序数据通道和时间时序数据通道,基于多通道轻量化的卷积神经网络构建全时空故障检测模型,利用样本库数据对网络训练,输出台区各故障发生概率。该方法能够有效提升故障检测模型的精度,保证故障检测可靠性。
57、(2)本发明提出基于云边轮流主导的全时空故障检测模型更新方法。边侧主导的模型更新基于事件触发机制,边缘服务器计算边侧全时空故障检测模型的检测准确率同时统计检测时延,并与设定阈值进行比较,根据比较结果判断事件发生情况,当事件发生时触发相应的响应结果,向云端提出更新请求进行边侧全时空故障检测模型更新,或主动上传边侧全时空故障检测模型。云侧主导的模型更新基于周期触发机制,云端在周期末触发更新动作,对周期内上传的边侧全时空故障检测模型进行聚合并测试,若聚合后模型性能优于原模型,则更新云侧全时空故障检测模型,有效解决了云或边单一主导模型更新时效率较低、可靠性较差的问题,提高了故障检测的准确性,降低了检测时延。
- 还没有人留言评论。精彩留言会获得点赞!