多传感器数据融合的高精度三维扫描雷达的制作方法
本发明涉及三维扫描系统,特别是涉及一种多传感器数据融合的高精度三维扫描雷达。
背景技术:
1、目前,容器(如料仓、储罐)内物料表面的三维形态大多通过一台3d扫描雷达来进行测量。然而,受限于雷达本身在单个检测周期内的扫描信号个数,现有3d扫描雷达存在难以兼顾扫描分辨率和扫描效率的问题。
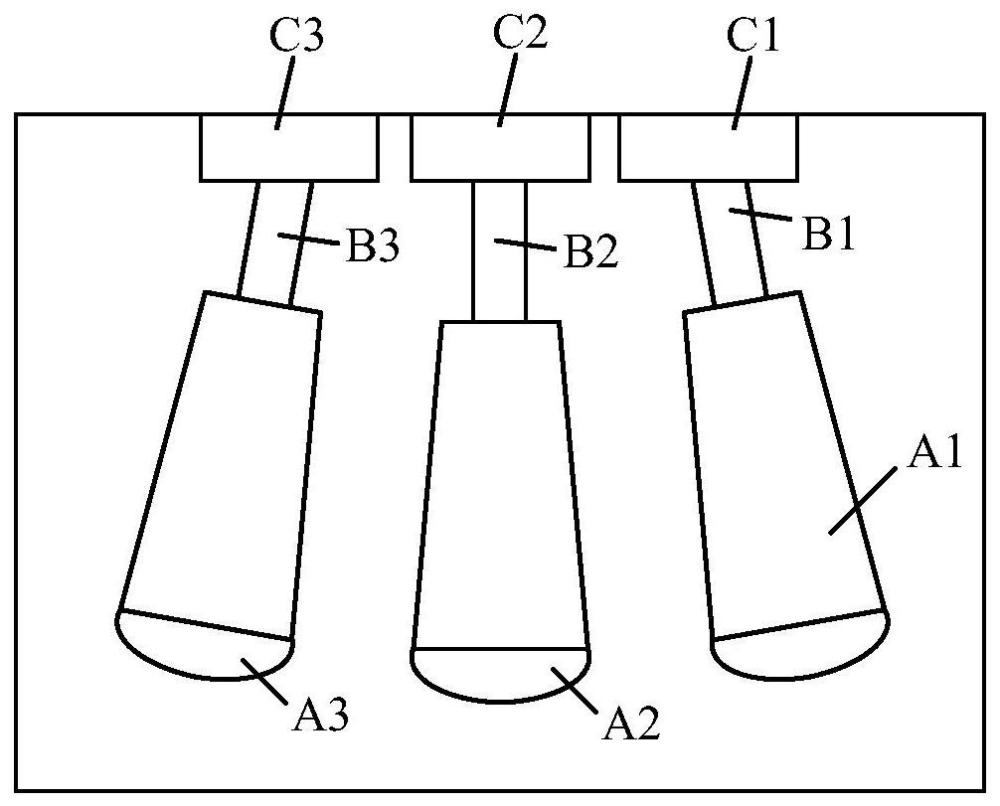
2、具体来说,图1是一种现有3d扫描雷达的扫描过程示意图,如图1所示,现有3d扫描雷达在一个检测周期内一般采用类似于在原扫描信号q1和原扫描信号q2之间增设扫描信号q1’,和/或在原扫描信号q2和原扫描信号q3之间增设扫描信号q2’等方式,直接提高3d扫描雷达的扫描分辨率。
3、然而,在3d扫描雷达的检测范围(比如图1中原扫描信号q1和原扫描信号q3之间的空间区域)不变的前提下,削减相邻两个扫描信号之间的角度差的同时增加扫描信号的个数,固然能够显著提升扫描分辨率,却也会极大增加3d扫描雷达的扫描总时间(即3d扫描雷达扫描完整个检测范围所需的一个检测周期的时间),增加3d扫描雷达的作业时间成本,致使3d扫描雷达的扫描效率低下。与之相反,若通过减少扫描信号个数(比如,将图1中处于原扫描信号q1和原扫描信号q3之间的原扫描信号q2削减掉)的方式来提升3d扫描雷达的扫描效率,则会抑制3d扫描雷达的扫描分辨率。
4、有鉴于此,亟需一种能够兼顾扫描分辨率和扫描效率的三维扫描雷达。
技术实现思路
1、本发明的目的是提供一种多传感器数据融合的高精度三维扫描雷达,旨在解决单台3d扫描雷达存在难以兼顾扫描分辨率和扫描效率的问题,在同一三维扫描雷达内部的至少一个安装面上装设至少两个扫描模块,协同配合获取容器内高精度物料扫描数据、图像等。
2、为实现本发明的目的所采用的一种技术方案是:
3、一种多传感器数据融合的高精度三维扫描雷达,包括控制模块和至少两个扫描模块;
4、至少两个所述扫描模块对应装设在所述三维扫描雷达内部的至少一个安装面上;
5、每一所述扫描模块,用于在测量容器内物料表面的三维形态之前,基于对应的预设扫描逻辑对对应的位姿参照物进行扫描,以获取并根据对应的参照点云数据确定出所述三维扫描雷达的安装位姿信息;以及,在测量所述容器内物料表面的三维形态过程中,基于所述安装位姿信息对测得的物料表面上设定范围内的物料点云数据进行校准,生成对应的物料校准点云数据并上传至所述控制模块;
6、所述控制模块,与每一所述扫描模块建立通讯连接,至少用于接收并根据全部所述物料校准点云数据,解析出物料精密参数和/或物料表面三维形态精密图。
7、可选地,所述安装位姿信息至少包括精确安装点的坐标点,或者安装角度偏差中的一种。
8、可选地,每一所述扫描模块至少通过以下方式确定精确安装点的坐标点:
9、设置一个预设平面;
10、以所述精确安装点为第一原点,将预设方向作为初始x或y坐标轴的正方向,在所述预设平面建立初始二维坐标系,以获得所述参照点云数据在所述初始二维坐标系下的投影坐标;
11、根据全部所述投影坐标,确定出所述预设平面中心点在所述初始二维坐标系下的中心坐标;
12、重新以所述预设平面中心点为第二原点,将所述预设方向作为标准x或y坐标轴的正方向,在所述预设平面建立标准二维坐标系,并将所述精确安装点的坐标和全部所述投影坐标转换至所述标准二维坐标系下,以根据所述精确安装点在所述标准二维坐标系下的坐标和第二原点坐标,确定所述精确安装点与所述预设平面中心点的相对位置;
13、根据所述预设平面与所述三维扫描雷达的实际安装面之间的关系,解析出所述精确安装点的坐标点;
14、其中,所述标准二维坐标系被配置为至少用于所述三维扫描雷达对所述容器内所述物料的表面三维形态的测量过程。
15、可选地,每一所述扫描模块至少通过以下方式确定安装角度偏差:
16、基于全部所述参照点云数据确定出参照点云所围图形的主轴方向,进而根据所述主轴方向与所述预设方向之间的差别,解析出所述三维扫描雷达在所述预设平面上的偏转角度;
17、根据所述参照点云数据在所述容器的分布情况和所述参照点云所围图形在所述主轴方向上的投影长度,获取所述三维扫描雷达相较于所述预设平面的偏转角度;
18、根据所述三维扫描雷达在所述预设平面上的偏转角度和所述三维扫描雷达相较于所述预设平面的偏转角度,确定所述三维扫描雷达与所述预设平面之间的方位角;
19、根据所述预设平面与所述三维扫描雷达的所述实际安装面之间的关系,解析出所述三维扫描雷达的所述安装角度偏差。
20、可选地,基于所述安装位姿信息对测得的物料表面上设定范围内的物料点云数据进行校准,生成对应的物料校准点云数据,至少包括:
21、在所述初始二维坐标系和所述标准二维坐标系的基础上,对应建立初始三维坐标系和标准三维坐标系;
22、根据所述精确安装点和所述预设平面中心点的相对位置,确定所述初始三维坐标系和所述标准三维坐标系之间的点云转换参数;
23、通过所述点云转换参数和所述安装角度偏差将所述初始三维坐标系下的所述物料点云数据转换为所述标准三维坐标系下的所述物料校准点云数据。
24、可选地,所述预设平面与所述实际安装面之间的关系至少包括所述预设平面为所述实际安装面、所述预设平面与所述实际安装面平行、所述预设平面与所述实际安装面呈已知角度中的一种。
25、可选地,所述预设方向为所述三维扫描雷达的安装方向;或是所述三维扫描雷达具有方位测量功能,此情况下,所述预设方向为所述三维扫描雷达测得的方位方向。
26、可选地,每一所述扫描模块包括传感器、运动元件和处理器;
27、所述传感器,设置在所述运动元件上,至少用于在测量所述容器内物料表面的三维形态之前,发射第一测量信号,以使所述第一测量信号经所述位姿参照物至少一次反射所形成的第一回射信号被所述传感器所接收;
28、所述运动元件,至少用于在测量所述容器内物料表面的三维形态之前,按照预设运动逻辑带动所述传感器沿设定方向对预设角度范围内的所述位姿参照物进行扫描;
29、所述处理器,分别连接所述传感器和所述运动元件,至少用于在测量所述容器内物料表面的三维形态之前,控制所述运动元件按照所述预设运动逻辑进行运动;以及,生成检测控制信号,以使所述传感器基于所述检测控制信号发射所述第一测量信号;以及,在所述运动元件带动所述传感器对所述位姿参照物的扫描过程中,接收所述传感器上传的所述第一回射信号,以获取所述参照点云数据,进而根据所述参照点云数据确定出所述安装位姿信息。
30、可选地,每一所述扫描模块包括传感器、运动元件和处理器;
31、所述传感器,设置在所述运动元件上,至少用于在测量所述容器内物料表面的三维形态过程中,发射第二测量信号,以使所述第二测量信号经物料表面至少一次反射所形成的第二回射信号被所述传感器所接收;
32、所述运动元件,至少用于在测量所述容器内物料表面的三维形态过程中,按照设定运动逻辑带动所述传感器对所述设定范围内的物料表面进行扫描;
33、所述处理器,分别连接所述传感器和所述运动元件,至少用于在测量所述容器内物料表面的三维形态过程中,控制所述运动元件按照所述设定运动逻辑进行运动;以及,生成扫描控制信号,以使所述传感器基于所述扫描控制信号发射所述第二测量信号;以及,在所述运动元件带动所述传感器对所述物料表面的扫描过程中,接收所述传感器上传的所述第二回射信号,以获取所述物料点云数据;以及,基于所述安装位姿信息对所述物料点云数据进行校准,以生成所述物料校准点云数据,并上传至所述控制模块。
34、为实现本发明的目的所采用的另一种技术方案是:
35、一种多传感器数据融合的高精度三维扫描雷达,包括控制模块和至少两个扫描模块;
36、至少两个所述扫描模块对应装设在所述三维扫描雷达内部的至少一个安装面上;
37、每一所述扫描模块,用于在测量容器内物料表面的三维形态之前,基于对应的预设扫描逻辑对对应的位姿参照物进行扫描,以获取对应的参照点云数据并上传至所述控制模块;以及,在测量所述容器内物料表面的三维形态过程中,基于设定扫描逻辑对设定范围内的物料表面进行扫描,以获取物料点云数据并上传至所述控制模块;
38、所述控制模块,与每一所述扫描模块建立通讯连接,至少用于在测量所述容器内物料表面的三维形态之前,根据每个所述扫描模块上传的所述参照点云数据对应确定一个所述三维扫描雷达的安装位姿信息,进而整合全部所述安装位姿信息形成精密安装位姿信息;以及,在测量所述容器内物料表面的三维形态过程中,基于所述精密安装位姿信息对每一所述扫描模块测得的物料表面上所述设定范围内的所述物料点云数据进行校准,生成对应的物料校准点云数据;以及,根据全部所述物料校准点云数据,解析出物料精密参数和/或物料表面三维形态精密图。
39、本发明所提供的多传感器数据融合的高精度三维扫描雷达,首先在测量容器内物料表面的三维形态之前,利用装设在三维扫描雷达内部的至少两个扫描模块分别基于对应的预设扫描逻辑对对应的位姿参照物进行扫描,以获取并根据对应的参照点云数据确定出三维扫描雷达的安装位姿信息(例如,当扫描模块的数量为两个时,两个扫描模块可以基于两种预设扫描逻辑对不同的位姿参照物进行扫描,进而获取并根据两组参照点云数据确定出第一安装位姿信息和第二安装位姿信息,通过平均法即可获得具有较高精度的安装位姿信息);然后在测量容器内物料表面的三维形态过程中,由每一扫描模块基于安装位姿信息对各自测得的物料表面上设定范围内的物料点云数据进行校准,进而生成物料校准点云数据并上传至数据处理模块;最终由数据处理模块根据所有物料校准点云数据解析出物料精密参数和/或物料表面三维形态精密图。
40、可以理解的是,本发明通过至少两个扫描模块的应用,能够自主设定每个扫描模块扫描物料区域的设定范围,并适应性调整单个扫描模块的扫描范围;相较于通过一台3d扫描雷达测量全部物料表面三维形态的技术方案,如本技术这样设置可以通过调整每一扫描模块在单个检测周期内的扫描信号个数,平衡整个三维扫描雷达的扫描分辨率和扫描效率。除此之外,由于各个扫描模块均集成在三维扫描雷达的内部,因而与采用多台3d扫描雷达测量全部物料表面三维形态的技术方案相比,本技术无需在容器开设多个安装孔,利于降低现场人员的开孔工作量;同时,对于一些压力容器(例如高压储罐等)而言,其上开孔数量越少,容器整体产生疲劳破坏和脆裂的风险越低,容器的使用寿命越不易受到影响。
- 还没有人留言评论。精彩留言会获得点赞!