无人机覆盖路径规划方法、装置、电子设备及存储介质
本发明涉及无人机,具体涉及一种无人机覆盖路径规划方法、装置、电子设备及存储介质。
背景技术:
1、近年来,随着全球海上运输业务的迅速发展,海上事故的发生率亦随之增加,尤其是人员落水事件。面对这一问题,海上搜救行动(search and rescue,sar)变得愈发重要。然而,传统的海上搜救手段如船只和直升飞机,存在响应时间长、成本高、受气候影响大等局限。
2、近期,无人机技术在海上搜救中的应用引起了广泛关注。无人机具有迅速部署、低成本和高机动性等优势,能有效扩大搜救区域的覆盖范围,提高搜救效率。然而,现有的无人机搜救方案多侧重于无人机的飞行控制和图像识别技术,而在无人机的覆盖路径规划方面研究相对较少,尤其是针对落水人员搜寻这一特定场景的路径规划。
3、现有技术中,无人机的路径规划通常采用简单的格网覆盖法或是基于特定算法的规划方法,这些方法或忽略了海洋环境的动态变化,如风速、水流等因素,或未能有效优化无人机的飞行续航和搜寻效率。此外,多无人机协作搜寻在路径规划和任务分配上也存在诸多挑战,如如何高效分配搜寻区域,避免重复搜寻,以及如何在保证搜寻效率的同时最大限度地利用无人机的续航能力等。
4、综上所述,现有的无人机路径规划技术,不能动态适应海洋环境,多无人机之间的协作能力不足,导致落水人员的海上搜救效率和成功率较低。
技术实现思路
1、有鉴于此,有必要提供一种无人机覆盖路径规划方法、装置、电子设备及存储介质,用以解决现有的无人机路径规划技术存在的落水人员的海上搜救效率和成功率较低的技术问题。
2、为了解决上述问题,一方面,本发明提供了一种无人机覆盖路径规划方法,包括:
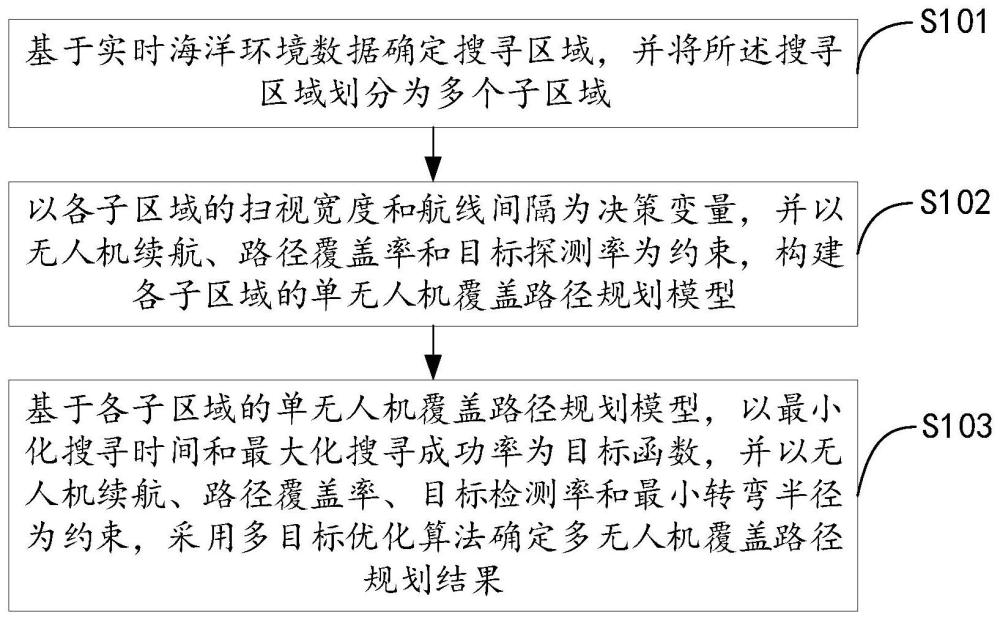
3、基于实时海洋环境数据确定搜寻区域,并将所述搜寻区域划分为多个子区域;
4、以各子区域的扫视宽度和航线间隔为决策变量,并以无人机续航、路径覆盖率和目标探测率为约束,构建各子区域的单无人机覆盖路径规划模型;
5、基于各子区域的单无人机覆盖路径规划模型,以最小化搜寻时间和最大化搜寻成功率为目标函数,并以无人机续航、路径覆盖率、目标检测率和最小转弯半径为约束,采用多目标优化算法确定多无人机覆盖路径规划结果。
6、在一种可能的实现方式中,所述基于实时海洋环境数据确定搜寻区域,包括:
7、确定落水人员的初始位置的概率密度分布;
8、基于实时海洋环境数据确定落水人员的受力分析结果;
9、基于所述概率密度分布以及所述受力分析结果,构建落水人员漂移模型;
10、基于所述落水人员漂移模型,并采用随机粒子模拟落水人员漂移运动,确定搜寻区域。
11、在一种可能的实现方式中,所述基于所述落水人员漂移模型,并采用随机粒子模拟落水人员漂移运动,确定搜寻区域,包括:
12、基于所述落水人员漂移模型,并采用随机粒子模拟落水人员漂移运动,确定落水人员的初始搜寻区域;
13、基于所述初始搜寻区域内的粒子分布,对所述初始搜寻区域进行优化,得到最终的搜寻区域。
14、在一种可能的实现方式中,所述初始搜寻区域包含有多个初始子区域;所述基于所述初始搜寻区域内的粒子分布,对所述初始搜寻区域进行优化,得到最终的搜寻区域,包括:
15、以所述初始搜寻区域中的中心粒子数目最多的初始子区域向外覆盖,直至对应覆盖区域的包含概率大于预设阈值,确定所述覆盖区域为最终的搜寻区域。
16、在一种可能的实现方式中,所述将所述搜寻区域划分为多个子区域,包括:
17、将每个无人机进入所述搜寻区域的初始边作为划分线,并基于无人机数量、每个无人机的搜寻工作区域面积、扫视宽度和航线间隔,将所述搜寻区域划分为多个子区域。
18、在一种可能的实现方式中,所述以各子区域的扫视宽度和航线间隔为决策变量,并以无人机续航、路径覆盖率和目标探测率为约束,构建各子区域的单无人机覆盖路径规划模型,包括:
19、以各子区域的无人机起飞时间、扫视宽度和航线间隔为决策变量,建立单无人机路径规划中的最小化搜寻时间目标函数和最大化发现概率目标函数;
20、以无人机续航、无人机载荷的目标探测率、路径覆盖率、飞行高度和航线间隔为约束,并结合单无人机路径规划中的最小化搜寻时间目标函数和最大化发现概率目标函数,构建单无人机覆盖路径规划模型。
21、在一种可能的实现方式中,所述基于各子区域的单无人机覆盖路径规划模型,以最小化搜寻时间和最大化搜寻成功率为目标函数,并以无人机续航、路径覆盖率、目标检测率和最小转弯半径为约束,采用多目标优化算法确定多无人机覆盖路径规划结果,包括:
22、基于各子区域的航线间隔和无人机最小转弯直径,确定各子区域的无人机非工作路径;
23、基于各子区域的无人机非工作路径和无人机工作路径,确定各子区域的无人机的飞行总路径;
24、基于各子区域的无人机的飞行总路径,以及单无人机覆盖路径规划模型,确定最小化搜寻时间和最大化搜寻成功率对应的目标函数,以及包含有无人机续航、路径覆盖率、目标检测率和最小转弯半径的约束条件;
25、基于所述目标函数和所述约束条件,构建多无人机路径规划模型;
26、基于多目标优化算法对所述多无人机路径规划模型进行求解,得到多无人机覆盖路径规划结果。
27、另一方面,本发明还提供一种无人机覆盖路径规划装置,包括:
28、区域确定模块,用于基于实时海洋环境数据确定搜寻区域,并将所述搜寻区域划分为多个子区域;
29、模型构建模块,用于以各子区域的扫视宽度和航线间隔为决策变量,并以无人机续航、路径覆盖率和目标探测率为约束,构建各子区域的单无人机覆盖路径规划模型;
30、规划结果确定模块,用于基于各子区域的单无人机覆盖路径规划模型,以最小化搜寻时间和最大化搜寻成功率为目标函数,并以无人机续航、路径覆盖率、目标检测率和最小转弯半径为约束,采用多目标优化算法确定多无人机覆盖路径规划结果。
31、另一方面,本发明还提供一种电子设备,包括存储器和处理器,其中,
32、所述存储器,用于存储程序;
33、所述处理器,与所述存储器耦合,用于执行所述存储器中存储的所述程序,以实现如上述任意一项所述的无人机覆盖路径规划方法。
34、另一方面,本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述任一项所述的无人机覆盖路径规划方法。
35、采用上述实现方式的有益效果是:本发明提供的无人机覆盖路径规划方法、装置、电子设备及存储介质,通过实时集成海洋环境数据,能够更精确地确定落水人员可能的漂移区域,即确定搜寻区域,从而针对性地规划无人机的搜寻路径,可以显著提高了搜救行动的效率和成功率。本发明采用多目标优化算法进一步确保了搜救覆盖率的最大化,同时考虑了无人机的续航能力,从而提高了整体搜救任务的完成率和成功率。通过将搜寻区域划分为多个子区域,每个子区域采取一个无人机进行搜寻,采用有效的无人机协作调度机制,在多无人机协作搜救中实现了资源的最优化使用,减少了重复覆盖和无效搜寻,从而降低了搜救成本。而且实时路径调整系统使无人机能够根据环境变化和搜救结果快速调整飞行路径,减少了不必要的飞行时间和能源消耗,提高了搜救的效率和成功率。
- 还没有人留言评论。精彩留言会获得点赞!