基于无人机的钢轨表面缺陷检测方法、系统、设备及介质
本发明涉及轨道交通钢轨的维护检测,具体而言,涉及基于无人机的钢轨表面缺陷检测方法、系统、设备及介质。
背景技术:
1、近年来,伴随我国轨道交通高速发展,巡检人工成本快速上涨,轨道交通维护压力明显上升。基于无人机辅助的机器视觉技术随着科技的发展应运而生,结合大数据技术代替传统的人工巡检实现钢轨表面缺陷的智能识别,原理是通过机器视觉技术获取钢轨表面图像,利用云服务器对图像进行处理,最终获取道路检测钢轨表面缺陷信息。
2、随着干线铁路(高速铁路、普速铁路)、城际铁路、市域(郊)铁路、城市轨道交通通车里程的递增,对干线轨道进行管养、维护、应急施救等自动化、智能化要求越来越高,采用传统的人工巡检方式对轨道钢轨信息的采集,存在工作效率低耗时长、依赖于巡检人员个人操作经验主观性高、智能化协同性差等问题。
技术实现思路
1、本发明的目的在于提供基于无人机的钢轨表面缺陷检测方法、系统、设备及介质,以改善上述问题。为了实现上述目的,本发明采取的技术方案如下:
2、第一方面,本申请提供了基于无人机的钢轨表面缺陷检测方法,包括:
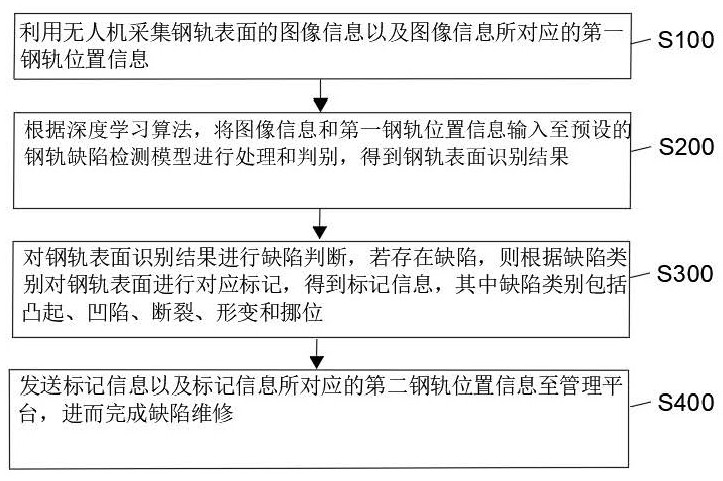
3、利用无人机采集钢轨表面的图像信息以及图像信息所对应的第一钢轨位置信息;
4、根据深度学习算法,将图像信息和第一钢轨位置信息输入至预设的钢轨缺陷检测模型进行处理和判别,得到钢轨表面识别结果;
5、对钢轨表面识别结果进行缺陷判断,若存在缺陷,则根据缺陷类别对钢轨表面进行对应标记,得到标记信息,其中缺陷包括凸起、凹陷、断裂、形变和挪位;
6、发送标记信息以及标记信息所对应的第二钢轨位置信息至管理平台,进而完成缺陷维修。
7、优选地,所述利用无人机采集钢轨表面的图像信息以及图像信息所对应的第一钢轨位置信息,其中包括:
8、利用无人机沿巡检轨迹实时采集钢轨表面的待检测图像,其中无人机包括gps、3d相机和激光位移传感器,其中3d相机用于采集待检测图像,激光位移传感器用于给3d相机提供光源;
9、对待检测图像进行图像处理,得到钢轨表面的彩色图像信息,将彩色图像信息记作图像信息;
10、根据gps实时采集图像信息所对应的第一钢轨位置信息。
11、优选地,所述根据深度学习算法,将图像信息和钢轨位置信息输入至预设的钢轨缺陷检测模型进行处理和判别,得到钢轨表面识别结果,其中包括:
12、对图像信息进行预处理,得到预处理结果,其中预处理包括将图像信息中的钢轨图片大小调整至预设的钢轨缺陷检测模型要求的尺寸;
13、将预处理结果中的钢轨图片输入至卷积层、激活函数和池化层的神经网络中进行训练,得到钢轨图片中的第一特征信息;
14、针对第一特征信息,计算钢轨图片得分情况,进而确定钢轨图片中所包含的待检测目标的位置信息;
15、基于softmax函数和预设的钢轨缺陷检测模型,对待检测目标的位置信息进行缺陷分类,得到概率分布结果;
16、根据非极大值抑制算法,对概率分布结果进行计算,得到钢轨表面识别结果,其中钢轨表面识别结果包括钢轨表面缺陷的类别和位置信息。
17、优选地,所述根据非极大值抑制算法,对概率分布结果进行计算,得到钢轨表面识别结果,其中包括:
18、计算概率分布结果中的所有候选框的分数,提取分数最高的边界框作为基准框;
19、计算基准框之外的每个候选框和基准框之间的交并比,其计算公式如下:
20、
21、式中,为第 i个候选框与基准框之间的交并比, a为基准框,为第 i个候选框;
22、判断交并比的值是否超过预设值,若超过,则预测为同一个目标,剔除交并比的值超过预设值的候选框;
23、选取剩下所有候选框中分数最高的作为新的基准框,重复上述判断步骤,直到剔除所有的候选框,将剩余的候选框记作钢轨表面识别结果。
24、第二方面,本申请还提供了基于无人机的钢轨表面缺陷检测系统,包括采集模块、识别模块、标记模块和检测模块,其中:
25、采集模块:用于利用无人机采集钢轨表面的图像信息以及图像信息所对应的第一钢轨位置信息;
26、识别模块:用于根据深度学习算法,将图像信息和第一钢轨位置信息输入至预设的钢轨缺陷检测模型进行处理和判别,得到钢轨表面识别结果;
27、标记模块:用于对钢轨表面识别结果进行缺陷判断,若存在缺陷,则根据缺陷类别对钢轨表面进行对应标记,得到标记信息,其中缺陷包括凸起、凹陷、断裂、形变和挪位;
28、检测模块:用于发送标记信息以及标记信息所对应的第二钢轨位置信息至管理平台,进而完成缺陷维修。
29、第三方面,本申请还提供了一种基于无人机的钢轨表面缺陷检测设备,包括:
30、存储器,用于存储计算机程序;
31、处理器,用于执行所述计算机程序时实现所述基于无人机的钢轨表面缺陷检测方法的步骤。
32、第四方面,本申请还提供了一种可读存储介质,所述可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现上述基于基于无人机的钢轨表面缺陷检测方法的步骤。
33、本发明的有益效果为:
34、本发明采用无人机、gps、激光位移传感器、3d相机、云服务器、控制器和喷码器,在无人机上搭载gps、3d相机、激光位移传感器,3d相机沿巡检轨迹实时采集轨道钢轨表面的图像信息,以获取钢轨表面彩色图片,gps实时采集钢轨位置信息,激光位移传感器为3d相机提供合适光源;将采集到的钢轨图像信息、位置信息传输到云服务器,云服务器通过基于深度学习的钢轨缺陷检测模型对采集的图像进行处理和判别,得到的识别结果中是否存在缺陷(凸起、凹陷、断裂、形变、挪位),如果存在,云服务器则根据缺陷类别将不同的信号发送给控制器,喷码器接到相应的控制指令则在有缺陷的钢轨表面进行对应的喷码标记,云服务器给维护管理人员呈现钢轨表面缺陷图片信息、位置信息,维护人员按照给定的位置前往缺陷所定位置进行扫码维修;使用无人机搭载摄像机进行非接触式巡检,解决了传统人工巡检效率低、维护人工费用高问题。
35、本发明使用无人机搭载摄像机进行非接触式巡检,可充分发挥无人机自动化程度高、能耗低、显著降低巡检工作人员劳动强度,解决了传统人工巡检效率低、维护人工费用高问题。
36、本发明的其他特征和优点将在随后的说明书阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明实施例了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
技术特征:
1.一种基于无人机的钢轨表面缺陷检测方法,其特征在于,包括:
2.根据权利要求1所述的基于无人机的钢轨表面缺陷检测方法,其特征在于,所述利用无人机采集钢轨表面的图像信息以及图像信息所对应的第一钢轨位置信息,其中包括:
3.根据权利要求1所述的基于无人机的钢轨表面缺陷检测方法,其特征在于,所述根据深度学习算法,将图像信息和第一钢轨位置信息输入至预设的钢轨缺陷检测模型进行处理和判别,得到钢轨表面识别结果,其中包括:
4.根据权利要求3所述的基于无人机的钢轨表面缺陷检测方法,其特征在于,所述根据非极大值抑制算法,对概率分布结果进行计算,得到钢轨表面识别结果,其中包括:
5.一种基于无人机的钢轨表面缺陷检测系统,基于如权利要求1-4中任意一项所述的基于无人机的钢轨表面缺陷检测方法,其特征在于,包括:
6.根据权利要求5所述的基于无人机的钢轨表面缺陷检测系统,其特征在于,所述采集模块,其中包括:
7.根据权利要求5所述的基于无人机的钢轨表面缺陷检测系统,其特征在于,所述识别模块,其中包括:
8.根据权利要求7所述的基于无人机的钢轨表面缺陷检测系统,其特征在于,所述计算单元,其中包括:
9.一种基于无人机的钢轨表面缺陷检测设备,其特征在于,包括:
10.一种可读存储介质,其特征在于:所述可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至4任一项所述基于无人机的钢轨表面缺陷检测方法。
技术总结
本发明提供了基于无人机的钢轨表面缺陷检测方法、系统、设备及介质,涉及轨道交通钢轨的维护检测技术领域,包括利用无人机采集钢轨表面的图像信息以及图像信息所对应的第一钢轨位置信息;根据深度学习算法,将图像信息和钢轨位置信息输入至预设的钢轨缺陷检测模型进行处理和判别,得到钢轨表面识别结果;对钢轨表面识别结果进行缺陷判断,对钢轨表面进行对应标记,发送标记信息以及标记信息所对应的第二钢轨位置信息至管理平台,进而完成缺陷维修。本发明的有益效果为使用无人机搭载摄像机进行非接触式巡检,可充分发挥无人机自动化程度高、能耗低、显著降低巡检工作人员劳动强度,解决了传统人工巡检效率低、维护人工费用高问题。
技术研发人员:李祥
受保护的技术使用者:西南交通大学
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!