一种多波束测深系统换能器高程实时改正系统的制作方法
本发明涉及沉管隧道基槽整平施工,特别是一种多波束测深系统换能器高程实时改正系统。
背景技术:
1、在沉管隧道基槽整平施工中,基槽水下地形的测量通常采用多波束测深系统进行,通过水深测量来得到整平后的基槽底面标高。基槽整平施工通常工期紧、窗口期短、多工序交叉衔接,尤其是在受边坡塌方、大径流、台风等因素影响而导致基槽回淤情况下,需要多波束测量迅速完成并提交测量成果。采用多波束测量时,海底高程由两部分组成,换能器以下部分由多波束测量得到,换能器以上部分通常是人工设定的吃水深度,一般采用目测方式,受涌浪影响精度较差。此外,数据采集完成后,还需要潮位改正、声速改正等数据处理,耗时较长。综上所述,传统的多波束测量方法难以满足沉管隧道基槽整平施工中的高精度和高效率要求。
2、为了减小吃水测定不准确带来的水深测量误差,免去数据处理潮位改正的步骤,提高测量的精度和效率,需要一种换能器高程实时改正系统。
技术实现思路
1、本发明为解决公知技术中存在的技术问题而提供一种多波束测深系统换能器高程实时改正系统,可以实时得到换能器的高程改正数,减小吃水测定不准确带来的水深测量误差,免去数据处理潮位改正的步骤,提高水下地形测量的精度和效率。
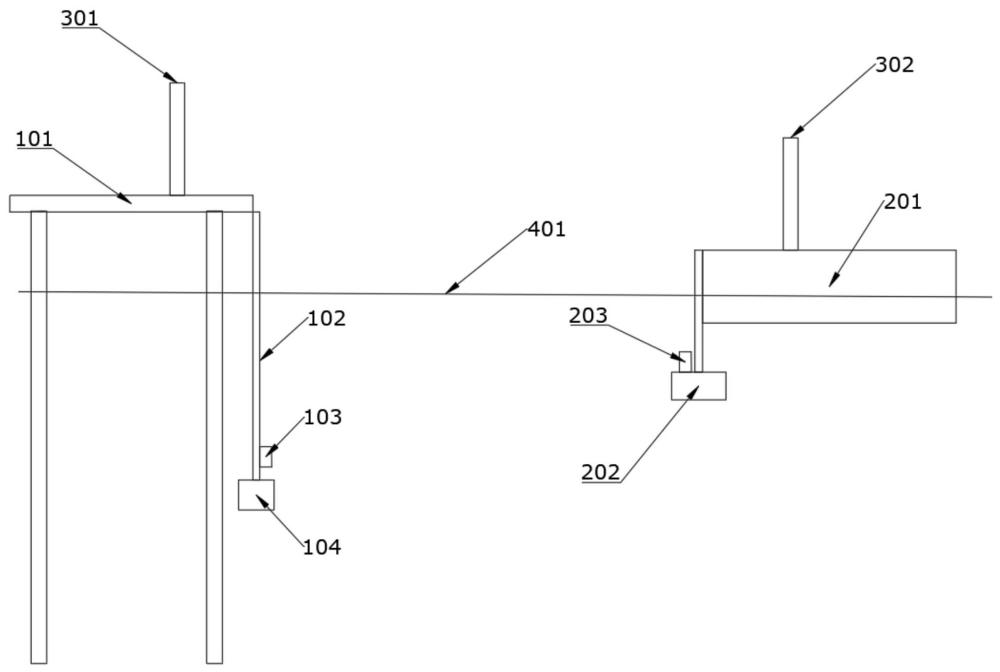
2、本发明为解决公知技术中存在的技术问题所采取的技术方案是:一种多波束测深系统换能器高程实时改正系统,所述多波束测深系统包括安装在测量船上的gnss定位仪、多波束甲板单元、多波束换能器、姿态传感器、表面声速计和计算机,该改正系统包括验潮站系统、数据传输系统以及搭载在测量船上的测量船压力传感器,所述测量船压力传感器设置在所述多波束换能器上,所述验潮站系统包括桩基式出水平台、平台压力传感器以及设置在所述桩基式出水平台上的气压传感器和供电单元,所述平台压力传感器入水深度不小于5米,采用钢链条悬挂在所述桩基式出水平台上,所述钢链条的末端连接有配重;所述数据传输系统包括安装在所述桩基式出水平台上的串口服务器和平台全向网桥以及安装在所述测量船上的测量船全向网桥,所述平台压力传感器和所述气压传感器数据均接入所述串口服务器,所述串口服务器依次通过所述平台全向网桥和所述测量船全向网桥向所述计算机传输所述平台压力传感器和所述气压传感器的测量数据,所述测量船压力传感器的测量数据传输至所述计算机,所述计算机采用以下公式计算所述多波束换能器在水下的实时高程ht:
3、
4、其中,h为平台压力传感器的绝对高程,采用大地测量的方法获得;sp0、qp0、cp0分别为平台压力传感器、气压传感器、测量船压力传感器在空气中同步初始化的深度测量计算值,sp、qp、cp分别为平台压力传感器、气压传感器、测量船压力传感器的深度测量计算值,上述深度测量计算值均采用阿基米德原理p=ρgh计算得到,其中p为测量得到的压强值,ρ为海水密度,g为重力加速度,h为深度值;h0为测量船压力传感器至多波束换能器高差。
5、所述平台压力传感器和所述测量船压力传感器深度测量计算所用密度ρ采用基于温盐深仪观测获得的、对应深度层的下降剖面和上升剖面等效密度的平均值,下降剖面和上升剖面等效密度dsti采用以下公式计算:
6、
7、其中,dsi为剖面密度,dpi为温盐深仪测量得到的海水剖面深度,i为温盐深仪测量值的数量,i=1 to n,同时对应不同的深度层,dp1为温盐深仪入水后海水剖面深度第一个观测值;
8、上升剖面观测数据需要按照采集时间降序排列后再按上式计算;
9、在多波束测量过程中,每隔一个设定时间间隔,在测量船上采用温盐深仪进行海水剖面观测,并计算下降剖面和上升剖面等效密度的平均值,用于最近的改正计算。
10、在测量作业前,该改正系统需要进行检验,其方法是:在所述桩基式出水平台周边找一平坦的自然海底,按照水流方向设定测线,所述测线长度大于200m小于500m,分别按照顺流漂浮、按照设定船速顺流和按照设定船速逆流三种方式让测量船跑线,使高程实时改正的多波束换能器对海底进行多波束测量,对每次多波束测量得到的海底高程进行比对,差值小于0.1m即可开展多波束测量作业,若差值超过0.1m,则要重新精确检查所述平台压力传感器的绝对高程和测量船压力传感器至多波束换能器的高差测量值。
11、本发明具有的优点和积极效果是:利用平均海平面实现两个压力传感器之间高程的传递,实时得到换能器的高程改正数,减小吃水测定不准确带来的水深测量误差,免去数据处理潮位改正的步骤,提高了水下地形测量的精度和效率。利用气压传感器监测大气压变化,并对变化值进行实时改正,利用滑动平均算法进行消波处理,利用等效密度对压力传感器深度计算进行改正,从而可以进一步提高水深测量的精度。该系统可用于水下地形的实时检测,得到水下地形的绝对高程,减少数据处理时间,提高水下基槽整平施工的作业效率。
技术特征:
1.一种多波束测深系统换能器高程实时改正系统,所述多波束测深系统包括安装在测量船上的gnss定位仪、多波束甲板单元、多波束换能器、姿态传感器、表面声速计和计算机,
2.根据权利要求1所述的多波束测深系统换能器高程实时改正系统,其特征在于,所述平台压力传感器和所述测量船压力传感器深度测量计算采用不同的消波算法,所述平台压力传感器的深度测量计算采用滑动平均算法,将滑动平均值作为深度测量计算值;所述测量船压力传感器深度测量计算进行消波处理,将计算值加上船舶升沉值he,船舶升沉值he采用姿态传感器在测量船上测得;所述多波束换能器在水下的实时高程ht的计算公式精确为:。
3.根据权利要求1所述的多波束测深系统换能器高程实时改正系统,其特征在于,所述平台压力传感器和所述测量船压力传感器深度测量计算所用密度ρ采用基于温盐深仪观测获得的、对应深度层的下降剖面和上升剖面等效密度的平均值,下降剖面和上升剖面等效密度dsti采用以下公式计算:
4.根据权利要求1所述的多波束测深系统换能器高程实时改正系统,其特征在于,在测量作业前,该改正系统需要进行检验,其方法是:在所述桩基式出水平台周边找一平坦的自然海底,按照水流方向设定测线,所述测线长度大于200m小于500m,分别按照顺流漂浮、按照设定船速顺流和按照设定船速逆流三种方式让测量船跑线,使高程实时改正的多波束换能器对海底进行多波束测量,对每次多波束测量得到的海底高程进行比对,差值小于0.1m即可开展多波束测量作业,若差值超过0.1m,则要重新精确检查所述平台压力传感器的绝对高程和所述测量船压力传感器至所述多波束换能器的高差测量值。
技术总结
本发明公开了一种多波束测深系统换能器高程实时改正系统,包括验潮站系统、数据传输系统以及搭载在测量船上的测量船压力传感器,测量船压力传感器设置在多波束换能器上,验潮站系统包括桩基式出水平台、平台压力传感器以及设置在桩基式出水平台上的气压传感器,平台压力传感器入水深度不小于5米,采用钢链条悬挂在桩基式出水平台上,平台压力传感器、气压传感器和测量船压力传感器的测量数据传输至计算机,计算机计算多波束换能器在水下的实时高程。本发明利用平均海平面实现两个压力传感器之间高程的传递,实时得到换能器的高程改正数,减小吃水测定不准确带来的水深测量误差,免去数据处理潮位改正的步骤,提高了水下地形测量的精度和效率。
技术研发人员:童仁平,王晓进,杨鲲,李含广,孟范伟,王文杰,王崇明,库安邦,东旭华,马深,历昌,王永强,隋海琛
受保护的技术使用者:交通运输部天津水运工程科学研究所
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!