一种基于莫尔条纹相关计算的光栅位移传感器调试方法
本发明涉及光栅位移传感器,特别是涉及一种基于莫尔条纹相关计算的光栅位移传感器调试方法。
背景技术:
1、微米、纳米级别的微位移传感测量技术在计量学、机器人、生物工程等众多不同的工业领域有着极其广泛的重要应用。在诸多类型的微位移传感器当中,以莫尔条纹技术理论基础的光栅移传感器得到了广泛的应用和关注。由于光栅衬底的热膨胀系数低,通常由石英或玻璃或其他热膨胀系数低的材料制成,因此光栅位移传感器稳定性好,零漂小。此外,光栅传感器具有体积小、质量好等显著优点。抗电磁干扰,对环境不敏感,在大型测量领域和温度、湿度、压力变化条件下具有广泛的纳米尺度测量应用。
2、目前,提高光栅传感器的测量精度和分辨力主要有两种途径:一是增加光栅的刻线数,二是采用各种电子细分技术(包括硬件细分和软件细分)。提高刻线密度的方法存在着制造工艺难度大、制造成本高的困难,同时,光栅刻线的密度越高将加大对光学结构系统、电路处理系统以及机械结构的要求;传统的电子学硬件细分技术需要复杂的电路设计和工艺,无论在抗干扰性、电路稳定性还是在体积上都会付出较大的代价。首先,莫尔条纹信号容易受到光源波动、谐波噪声、幅差、相位差偏移等因素的影响,难以进一步提高测量精度和分辨率。此外,由于这种莫尔条纹获取系统的结构特性,实际条纹信号并非理想的正余弦信号,存在着信号幅值波动,两路信号不严格正交等现象,当光栅尺非匀速移动时,输出的莫尔条纹信号也并不是周期恒定信号,这些因素都会对条纹的细分产生影响。
技术实现思路
1、为了解决上述问题,本发明提供一种基于纵向莫尔条纹相关计算的光栅位移传感器及其调试方法,采用基于等距光栅的纵向莫尔条纹形成机构,实现基于线阵ccd捕捉双光栅纵向莫尔条纹移动的精确位置测量方法,并设计了一种归一化互相关(ncc)亚像素图像配准算法。
2、为解决上述技术问题,本发明采用的一个技术方案是:
3、一种基于纵向莫尔条纹相关计算的光栅位移传感器,包括基座、光栅调节定位装置、一字激光器、激光干涉仪、线阵ccd、光栅位移驱动组件以及光栅位移计算系统;
4、所述光栅调节定位装置包括栅尺定位主支架、与栅尺定位主支架相对设置的栅尺定位副支架,栅尺定位主支架的中部开设有通光孔,通光孔的顶部两侧和底部两侧分别转动安装有垂向位置可调的横向调整导向滑轮,栅尺定位主支架的前侧面上固定设置有位于通光孔前侧的指示光栅,上、下两组横向调整导向滑轮之间活动夹持有平行设置于指示光栅前侧且可水平横向移动的标尺光栅,标尺光栅和指示光栅形成光栅副;
5、栅尺定位主支架的前侧面两端均转动安装有至少一个水平纵向位置可调且与标尺光栅后侧面滚动接触的主纵向调整导向滑轮,所述栅尺定位副支架的侧面上转动安装有与主纵向调整导向滑轮配对设置且与标尺光栅前侧面滚动接触的副纵向调整导向滑轮;
6、所述一字激光器位于标尺光栅的前侧方,向光栅副提供点光源,光栅副形成纵向莫尔条纹;
7、所述激光干涉仪检测标尺光栅的位移得到参考位移输出;
8、所述线阵ccd与指示光栅平行设置且固定位于通光孔的后侧,所述线阵ccd接收纵向莫尔条纹的光信号,光信号经转换处理后经归一化互相关算法程序计算得到光栅位移传感器的输出位移;
9、所述光栅位移驱动组件包括固定设置于标尺光栅一端外侧的位放支架,位放支架的侧面固定连接有菱形位移驱动放大机构,菱形位移驱动放大机构的内部动力输入端设置有压电致动器,菱形位移驱动放大机构的动力输出端与标尺光栅的端部固定连接;
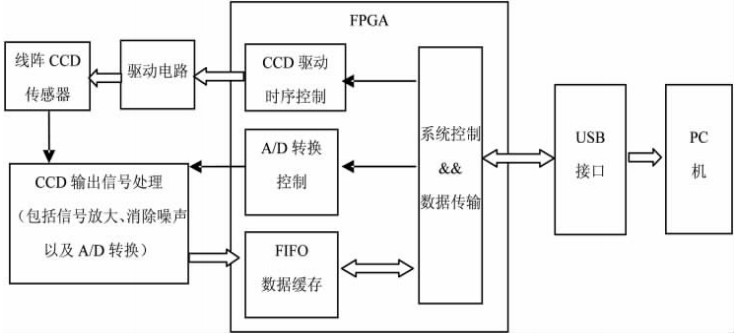
10、所述光栅位移计算系统包括与线阵ccd通讯连接的fpga以及与fpga通讯连接的pc机,所述pc机内设置有基于matlab软件的归一化互相关算法程序。
11、进一步的,所述栅尺定位主支架上设置有在通光孔的顶端两侧和底端两侧对称分布的横向l型杠杆结构,横向l型杠杆结构的自由端内活动套设有垂向设置的垂向调节螺钉,垂向调节螺钉的端部与栅尺定位主支架螺纹连接,横向l型杠杆结构的另一端通过柔性铰链结构固定连接在栅尺定位主支架的顶面或底面上,所述横向调整导向滑轮转动安装于横向l型杠杆结构的自由端前侧面上;
12、所述栅尺定位主支架的前侧面两端分别设置有至少一个主垂向l型杠杆结构,栅尺定位主支架的后侧壁内活动套设有水平纵向设置的主纵向调节螺钉,主纵向调节螺钉的端部与主垂向l型杠杆结构的自由端螺纹连接,主垂向l型杠杆结构的另一端通过柔性铰链结构固定连接在栅尺定位主支架的前侧面端部上,所述主纵向调整导向滑轮转动安装于主垂向l型杠杆结构的自由端前侧面上。
13、进一步的,所述栅尺定位副支架的后侧面内设置有与主垂向l型杠杆结构相对设置的副垂向l型杠杆结构,栅尺定位副支架的前侧壁内活动套设有水平纵向设置的副纵向调节螺钉,副纵向调节螺钉的端部与副垂向l型杠杆结构的自由端螺纹连接,副垂向l型杠杆结构的另一端通过柔性铰链结构固定连接在栅尺定位副支架的后侧面端部上,所述副纵向调整导向滑轮转动安装于副垂向l型杠杆结构的自由端后侧面上。
14、进一步的,所述基座的顶面上还固定设置有位于通光孔前侧的激光器夹头,激光器夹头上固定安装有一字激光器和激光干涉仪。
15、进一步的,所述激光器夹头的中部开设有通孔,通孔的底部两侧分别设置有缺口槽,通孔的顶部开设有贯穿激光器夹头顶部的通槽,激光器夹头的顶部一侧部分内开设有螺栓过孔、顶部另一侧部分内开设有螺纹连接孔。
16、进一步的,所述栅尺定位主支架和栅尺定位副支架均采用7075铝合金材料制成。
17、还提供了一种等栅距光栅纵向莫尔条纹形成机构,该机构包括固定设置的指示光栅、可水平横向移动的标尺光栅以及点光源,标尺光栅与指示光栅平行设置,且标尺光栅的光栅周期与指示光栅的光栅周期相同,标尺光栅和指示光栅的光栅线均垂直于标尺光栅的运动方向,点光源位于标尺光栅远离指示光栅的一侧;
18、在点光源的作用下,栅距为w1的标尺光栅实际投影到栅距为w2的指示光栅的栅距长度经过一定放大后变为w11,根据相似原理其计算公式为:
19、;
20、光栅周期为w2和w11的两光栅会形成纵向的莫尔条纹,标尺光栅相对指示光栅运动一个光栅周期的距离后,该相对移动距离经过点光源下的光栅副的放大之后,呈现的纵向莫尔条纹的条纹宽度为:
21、;
22、其中,d1为标尺光栅与指示光栅之间的间距,d2为点光源距离标尺光栅的光栅面的垂直距离;
23、光栅位移传感器位移分辨率表示为:
24、;
25、其中,n为一个纵向莫尔条纹周期所占据的ccd像素点数,w为一个光栅周期;
26、线阵ccd的整像素输出结果的每个像素宽度为b,则根据上式有以下关系:
27、。
28、进一步的,所述标尺光栅的光栅周期与指示光栅的光栅周期相同,即w1=w2=w,则
29、;
30、光栅位移传感器位移分辨率表示为:
31、。
32、又提供了一种基于莫尔条纹相关计算的光栅位移传感器调试方法,该调试方法包括以下步骤:
33、s1、调整标尺光栅的水平位姿,使标尺光栅和指示光栅的光栅线均垂直于标尺光栅的水平移动方向,调整标尺光栅与指示光栅之间的平行间距;
34、s2、对光栅位移驱动组件施加预设波形的驱动电压,光栅位移驱动组件工作驱动标尺光栅相对指示光栅水平移动;
35、s3、一字激光器向标尺光栅表面提供点光源,点光源经相对移动的光栅副形成纵向莫尔条纹;
36、s4、线阵ccd接收纵向莫尔条纹的光信号,并经fpga转化为数字信号并传送至pc机;
37、s5、pc机运行归一化互相关算法程序,对采集的数据进行处理,获得光栅位移传感器的位移输出;
38、s6、激光干涉仪检测标尺光栅的参考位移输出;
39、s7、对激光干涉仪向获得的参考位移输出与计算所得光栅位移传感器的输出位移进行比较分析;
40、s8、重复步骤s1至步骤s7,通过改变光栅与光源之间的平行间距,获得光栅传感器对应于光源在不同位置的分辨率以及光栅传感器的最佳分辨率。
41、进一步的,在步骤s5中,在进行归一化互相关算法作相关计算前,先采用插值的方式对线阵ccd每条线的整像素输出结果进行亚像素插值细分。
42、进一步的,对线阵ccd每条线的整像素输出结果进行亚像素插值细分采用的插值方式为样条插值。
43、进一步的,施加在光栅位移驱动组件上的驱动电压为三角波电压或阶梯波电压。
44、以及提供了一种应用于光栅传感器的归一化互相关亚像素配准算法,包括以下步骤:
45、s1、平行放置的光栅副在适当的光源下产生纵向的莫尔条纹,线阵ccd接收纵向莫尔条纹的光信号,光信号经处理转换为数字信号后传送至pc机;
46、s2、pc机运行归一化互相关算法程序,对采集的数据进行处理,获得光栅位移传感器的输出位移;
47、具体步骤为:
48、s2.1、从线阵ccd输出的两帧具有n个离散点的离散时间序列f=[f0,f1,……,fn-1],g=[g0,g1,……,gn-1]中提取的长度均为m的相同连续数据点的两个子集时间序列fi=[fp,fp+1,……,fp+m-1],gi=[gq,gq+1,……,gq+m-1];
49、s2.2、归一化互相关算法定义为:
50、;
51、其中,p,q,m均为正整数,且p,q∈[0,n-m+1],m∈[2,n],,表示线阵ccd输出的两组离散序列,,;
52、s2.3、将两个子集时间序列的数据代入归一化互相关算法进行计算。
53、进一步的,在步骤s2.2中,在进行归一化互相关算法作相关计算前,先采用插值的方式对线阵ccd每条线的整像素输出结果进行亚像素插值细分。
54、进一步的,对线阵ccd每条线的整像素输出结果进行亚像素插值细分采用的插值方式为样条插值。
55、与现有技术相比较,本发明的有益效果如下:
56、本发明所设计的基于莫尔条纹相关计算的高分辨率光栅位移传感器,实现了基于线阵ccd捕捉双光栅纵向莫尔条纹移动的精确位置测量方法,并设计了一种归一化互相关(ncc)亚像素图像配准算法。当光强发生变化导致一定范围内莫尔条纹信号发生直流漂移时,线阵ccd获得的条纹信号整体发生漂移,仍然包含准确的相位信息,通过归一化相关算法能够很好的抑制幅值波动带来的影响。与传统的光栅采用的光电探测器相比,该光栅位移传感器具备高鲁棒性和灵活性的能力,能够实现在线精确位置测量。
- 还没有人留言评论。精彩留言会获得点赞!