一种车载雷达成像信号处理方法、设备及介质与流程
本发明属于雷达,特别是涉及一种车载雷达成像信号处理方法、设备及介质,可用于在车载平台存在抖动和成像几何不确定情况下的雷达高分辨率成像,并提升聚焦精度和成像质量。
背景技术:
1、合成孔径雷达(sar)具有全天时、全天候的对地观测能力,在海洋监测、环境监测、测绘和军事等方面的应用上具有独特的优势。车载合成孔径雷达是合成孔径雷达技术在民用中的重要应用,能够在许多禁飞的地区代替机载雷达得到相关区域的高分辨率图像,可以弥补光学相机和激光雷达在恶劣环境下的感知能力不足的问题。
2、合成孔径雷达利用雷达平台与目标之间的相对运动来获得高的方位分辨率。对于车载雷达,一般要求平台在固定高度匀速直线行驶,才能得到质量较好的图像。然而在实际行驶过程中,平台的速度和轨迹往往是不理想的,尤其在路面状况不佳、存在障碍物的情况下,轨迹和速度皆会发生偏差,进而导致图像出现散焦和模糊。因此对于车载合成孔径雷达,运动补偿是得到高质量图像的关键步骤。
3、目前,运动补偿的方法主要分为基于仪表测量的和基于信号处理的,前者依靠平台搭载的惯性导航系统和全球定位系统实时测量车载平台的行驶状态,但长时间工作会产生积累误差;后者利用回波数据反映出的非理想情况来估计多普勒参数,进而估计平台的运动情况,这种方法虽精度较高但补偿算法十分复杂。因此设计一种针对车载sar的高效且补偿效果好的信号处理方法是目前亟待解决的问题。
技术实现思路
1、本发明目的是为了解决现有雷达成像算法不适用于车载平台存在抖动和成像几何不确定的问题。在上述情况下,现有算法对车载雷达不稳定运动的补偿效果差,导致距离向和方位向均出现严重的散焦问题,由此,本发明提出了一种车载雷达成像信号处理方法、设备及介质。所述方法利用pos数据和回波数据修正平台运动,同时利用定标数据进行距离压缩,最后通过pga自聚焦算法进一步提升聚焦质量的雷达成像信号。
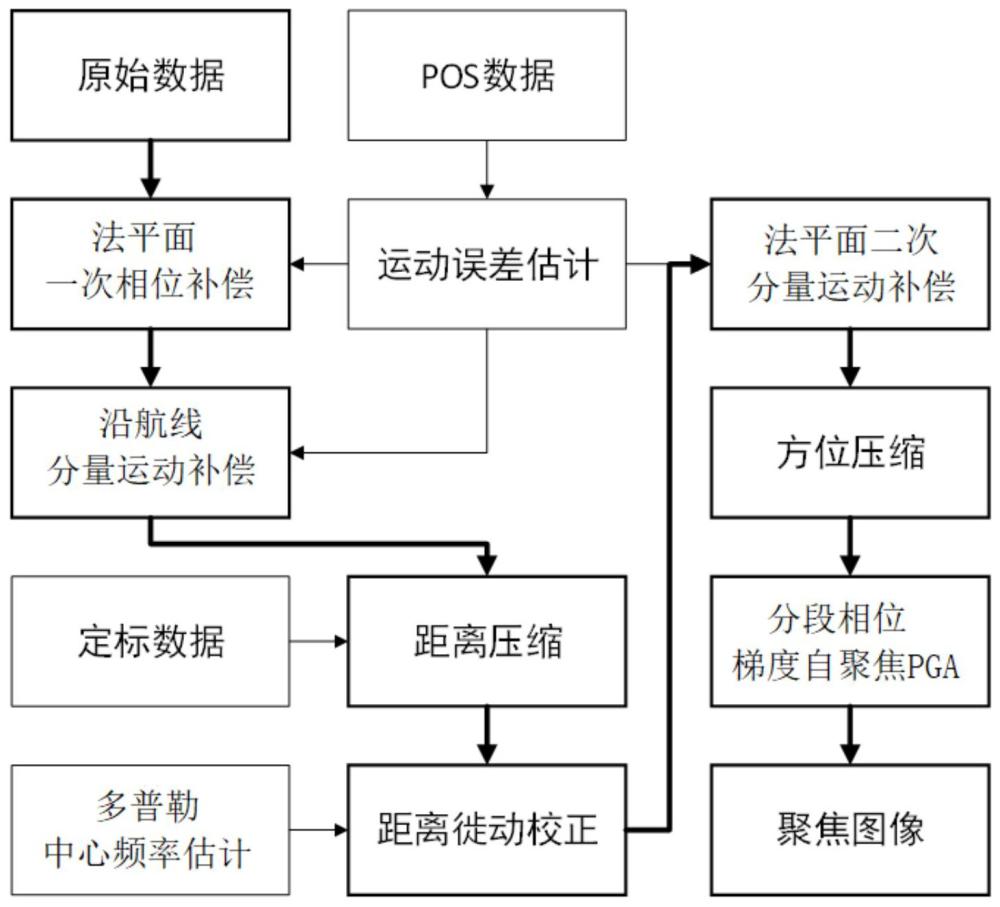
2、本发明是通过以下技术方案实现的,本发明提出一种车载雷达成像信号处理方法,所述方法包括以下步骤:
3、步骤一:获得雷达回波信号,并对该回波信号进行下变频处理和离散采样,得到雷达基带原始回波数据;
4、步骤二:读取联合定位定向系统pos的测量数据,通过坐标转换将数据转换到天线相位中心位置,确定车载平台的理想运动方向和速度,估计天线相位中心垂直航向和沿航向的运动误差;
5、步骤三:利用步骤二中估计得到的运动误差进行包络校正、法平面一次相位补偿,同时利用定标数据进行距离压缩处理;
6、步骤四:利用步骤二中估计得到的运动误差进行沿航线分量运动补偿;
7、步骤五:估计多普勒中心频率,通过插值进行距离徙动校正;
8、步骤六:利用步骤二中估计得到的运动误差进行法平面二次分量运动补偿,并进行方位压缩处理;
9、步骤七:利用分段相位梯度自聚焦pga算法进一步提升图像质量,得到最终的成像结果。
10、进一步地,所述联合定位定向系统pos用于获取车载平台精确的位置和姿态信息,进而利用这些信息构建精确的几何关系来计算运动误差;由车载平台引起的合成孔径阵列误差分为垂直航向的误差和沿着航向的误差;垂直航向的误差表示为:
11、
12、沿着航向的误差表示为:
13、
14、其中,表示垂直航向的误差,表示沿着航向的误差,为慢时间,为下视角,为车载平台沿理想运动方向在时刻的实际位置,分别为车载平台沿垂直于理想运动方向的两个分量在时刻的实际位置,和分别为同一时刻下位于波束中心的目标点的沿航向位置和理想情况下的最近斜距。
15、进一步地,所述步骤三中的运动误差补偿为垂直航线运动补偿的第一步,分为包络校正和法平面一次相位补偿两步进行,在频域上的包络补偿函数为:
16、
17、式中,表示包络补偿函数,为场景中心的下视角,为距离频率,为光速, j表示虚数单位;
18、所述一次相位补偿为距离空不变补偿分量,可以表示为:
19、,为波长。
20、进一步地,在步骤三中,将距离压缩的参考信号设置为与发射信号相同的理想信号,其在距离频域的表达式为:
21、
22、式中,表示参考信号在距离频域的表达式,为距离向线性调频信号的调频率;
23、将参考信号在距离频域的表达式替换为定标数据,并将包络补偿函数、补偿分量和定标数据相乘,即可完成一次垂直航线运动补偿和距离压缩处理,处理后的信号形式如下式所示:
24、
25、式中,为回波信号在距离频域的表达式。
26、进一步地,所述步骤四中的沿航线分量运动补偿根据速度误差信息获取多普勒调频率误差:
27、
28、式中,为时刻的速度误差,为平均速度,为散射点到车载平台理想轨迹的最近距离,然后积分计算得到补偿的相位误差:
29、
30、式中,表示 u时刻的多普勒调频率误差,表示时刻;
31、经过沿航线分量运动补偿后的频域信号表达式为:
32、。
33、进一步地,所述步骤五中的多普勒中心频率估计采用相关函数法,利用回波功率谱的逆傅里叶变换得到相关函数:
34、
35、式中,为多普勒中心为0时的功率谱对应的相关函数,为实函数;表示时间差;从的相角可以估计出多普勒中心频率,并利用估计出的来进行距离徙动校正。
36、进一步地,所述步骤六中的法平面二次分量运动补偿是针对距离空变量的补偿操作;补偿函数表示为:
37、。
38、进一步地,补偿完成后,乘以方位向匹配滤波函数并转换到二维时域,即可得到sar图像;方位向匹配滤波函数如下式所示:
39、
40、式中,为多普勒频率,为随最近斜距变化的方位向调频率。
41、本发明提出一种电子设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现所述的车载雷达成像信号处理方法的步骤。
42、本发明提出一种计算机可读存储介质,用于存储计算机指令,所述计算机指令被处理器执行时实现所述的车载雷达成像信号处理方法的步骤。
43、与现有的技术相比,本发明具有以下优点:
44、首先,本发明充分利用车载平台搭载的定位定向系统实时获取平台的位置和姿态信息,在路况不佳,平台运动非理想、不稳定的情况下,能够建立精确的几何关系,准确估计平台相较于理想运动的运动误差,从而进行运动补偿。本发明将运动误差分为垂直于航向和沿航向的两个分量,分别进行补偿。对于垂直航向分量,又分为距离空不变的一次补偿和随距离空变的二次补偿,分别在距离徙动前后完成,以提高补偿精度。
45、其次,本发明在距离维的脉冲压缩过程中采用定标数据作为参考信号,代替传统脉冲压缩所采用的理想信号,尽可能缩小参考信号与回波信号间的差异,提高脉冲压缩的聚焦效果。
46、最后,本发明进一步利用回波数据估计残余相位误差来提升聚焦效果。pga算法是一种应用广泛且十分稳健的相位补偿方法,本发明采用了针对条带模式改进的分段pga算法,从而使整个图像因残余相位误差造成的散焦情况得到进一步改善。
- 还没有人留言评论。精彩留言会获得点赞!