一种激光雷达的室内面积实地勘验方法与流程
本发明涉及激光雷达测距的,具体涉及一种激光雷达的室内面积实地勘验方法。
背景技术:
1、目前,烟草零售客户数量巨大,专卖部门在烟草专卖零售许可证新办、延续均需要进行实地勘验,营销部门在零售客户新入网时要对客户经营店面情况进行评估打分。
2、但在实地勘察过程中,当中涉及面积测算、店铺内烟柜投影面积计算等指标项目,而现有技术都是采用面积测量仪或者尺子进行烟草零售客户店铺实地勘验,目前这两种方式也是需要人工去测量,使用传统的尺寸测量,需要投入至少两个人,测量结果通过人工填写表格,然后录入到业务系统零售客户实地勘验表;而使用面积测量仪只能测量店铺的室内面积,无法测量烟柜等固定家具的投影面积。而这两种方式的过程中都需要人工进行测量或估算,准确率存在一定偏差,效率较低,最关键的是数据无法自动保存、传送到业务系统的零售客户实地勘验表
技术实现思路
1、为了解决上述技术问题,本发明提供一种激光雷达的室内面积实地勘验方法,以解决现有技术中在实地勘察中需要人工进行测量或估算,导致准确率存在一定偏差,效率较低的问题。
2、本发明的目的可以通过以下技术方案实现:一种激光雷达的室内面积实地勘验方法,包括以下步骤:
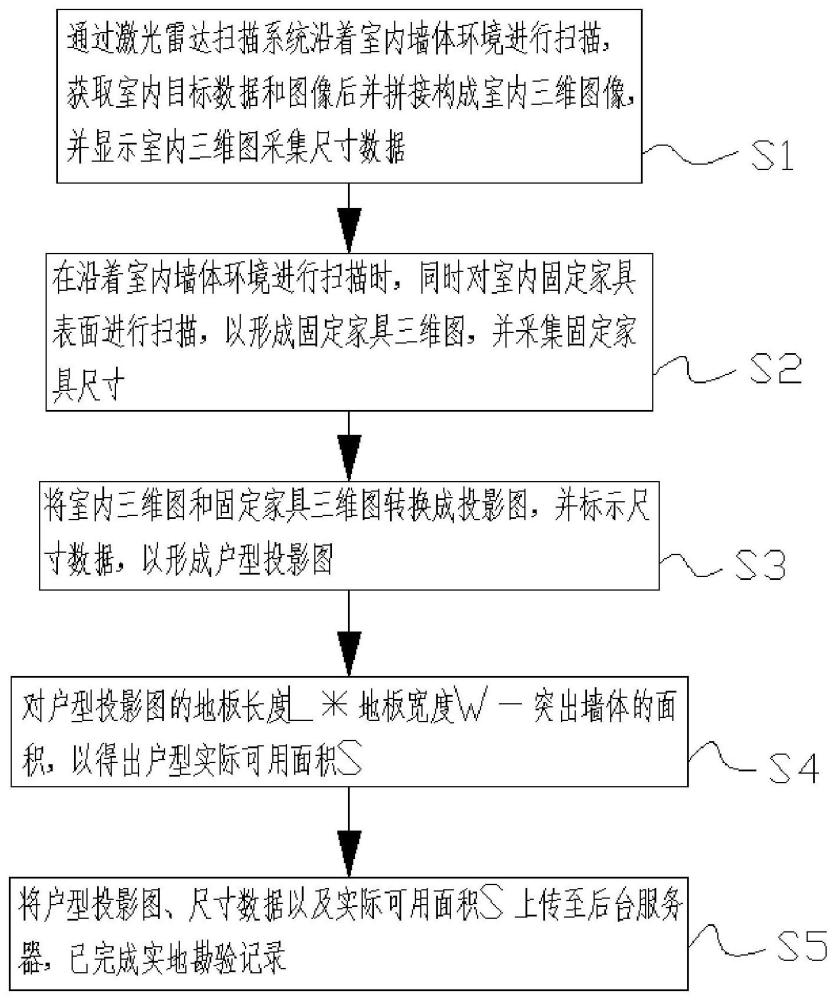
3、s1、通过激光雷达扫描系统沿着室内墙体环境进行扫描,获取室内目标数据和图像后并拼接构成室内三维图像,并显示室内三维图采集尺寸数据;
4、s2、在沿着室内墙体环境进行扫描时,同时对室内固定家具表面进行扫描,以形成固定家具三维图,并采集固定家具尺寸;
5、s3、将室内三维图和固定家具三维图转换成投影图,并标示尺寸数据,以形成户型投影图;
6、s4、对户型投影图的地板长度l*地板宽度w-突出墙体的面积,以得出户型实际可用面积s;
7、s5、将户型投影图、尺寸数据以及实际可用面积s上传至后台服务器,已完成实地勘验记录。
8、上述的一种激光雷达的室内面积实地勘验方法中,所述步骤s1和s2采用的是基于li dra的点云处理进行扫描并获取对应点的坐标以及尺寸。
9、上述的一种激光雷达的室内面积实地勘验方法中,所述激光雷达扫描系统包括信息处理终端、激光雷达传感器和ar相机,所述激光雷达传感器用于获取室内目标的距离值,所述ar相机用于获取室内目标的现场图像数据,通过信息处理终端将获取的待测目标的距离值以及待测目标的现场图像数据融合。
10、上述的一种激光雷达的室内面积实地勘验方法中,所述激光雷达传感器通过获取地面的三维点云数据,从地面的三维点云数据中获取地面特征点信息,根据地面特征点信息,生成地面虚拟点云,对地面的虚拟点云进行线性插值,得到完整的室内地面信息。
11、上述的一种激光雷达的室内面积实地勘验方法中,所述ar相机在激光雷达传感器获取室内地面信息的同时,对获取的地面特征点信息周围拍照获取高帧图像,使得激光雷达传感器得到完整的室内地面信息的同时获得整个地面图像,然后通过信息处理终端将整个地面图像和室内地面信息融合成带数据的室内三维图。
12、上述的一种激光雷达的室内面积实地勘验方法中,所述信息处理终端为手机终端。
13、上述的一种激光雷达的室内面积实地勘验方法中,所述激光雷达传感器在获取地面的三维点云数据时,若出现固定家具形成阻挡物,需要先完成获取地面三维点云数据,然后返回再获取固定家具所形成阻挡物的三维点云数据,同时获取固定家具所形成阻挡物的高帧图像。
14、上述的一种激光雷达的室内面积实地勘验方法中,所述步骤s1在开始扫描前,先输入客户名称,其规则为:如果重复输入输入客户名称不会提示重复,直至扫描完成后,当用户上传至后台服务器后,会将后台同样名字的客户名称数据进行数据更新。
15、上述的一种激光雷达的室内面积实地勘验方法中,所述数据更新包括室内面上述的一种激光雷达的室内面积实地勘验方法中,在获取固定家具所形成阻挡物的高帧图像后,用户可根据实际需要对固定家具所形成阻挡物的高帧图像进行编辑删除。
16、本发明的有益效果在于:通过激光雷达扫描系统可以对室内环境进行扫描,并获取室内的三维图像和数据,并可以转化为户型投影图,从而可以根据数据进行计算得出户型实际可用面积,整个过程只需扫描生成即可,操作人员只需要一个即可完成,而且得到的数据以及户型投影图可以直接上传至后台服务器,不需要人工填写表格,获取的数据更准确,勘察效率更高。
技术特征:
1.一种激光雷达的室内面积实地勘验方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种激光雷达的室内面积实地勘验方法,其特征在于,所述步骤s1和s2采用的是基于lidra的点云处理进行扫描并获取对应点的坐标以及尺寸。
3.根据权利要求2所述的一种激光雷达的室内面积实地勘验方法,其特征在于,所述激光雷达扫描系统包括信息处理终端、激光雷达传感器和ar相机,所述激光雷达传感器用于获取室内目标的距离值,所述ar相机用于获取室内目标的现场图像数据,通过信息处理终端将获取的待测目标的距离值以及待测目标的现场图像数据融合。
4.根据权利要求3所述的一种激光雷达的室内面积实地勘验方法,其特征在于,所述激光雷达传感器通过获取地面的三维点云数据,从地面的三维点云数据中获取地面特征点信息,根据地面特征点信息,生成地面虚拟点云,对地面的虚拟点云进行线性插值,得到完整的室内地面信息。
5.根据权利要求4所述的一种激光雷达的室内面积实地勘验方法,其特征在于,所述ar相机在激光雷达传感器获取室内地面信息的同时,对获取的地面特征点信息周围拍照获取高帧图像,使得激光雷达传感器得到完整的室内地面信息的同时获得整个地面图像,然后通过信息处理终端将整个地面图像和室内地面信息融合成带数据的室内三维图。
6.根据权利要求5所述的一种激光雷达的室内面积实地勘验方法,其特征在于,所述信息处理终端为手机终端。
7.根据权利要求5所述的一种激光雷达的室内面积实地勘验方法,其特征在于,所述激光雷达传感器在获取地面的三维点云数据时,若出现固定家具形成阻挡物,需要先完成获取地面三维点云数据,然后返回再获取固定家具所形成阻挡物的三维点云数据,同时获取固定家具所形成阻挡物的高帧图像。
8.根据权利要求1所述的一种激光雷达的室内面积实地勘验方法,其特征在于,所述步骤s1在开始扫描前,先输入客户名称,其规则为:如果重复输入输入客户名称不会提示重复,直至扫描完成后,当用户上传至后台服务器后,会将后台同样名字的客户名称数据进行数据更新。
9.根据权利要求8所述的一种激光雷达的室内面积实地勘验方法,其特征在于,所述数据更新包括室内面积、固定家具面积以及户型投影图。
10.根据权利要求7所述的一种激光雷达的室内面积实地勘验方法,其特征在于,在获取固定家具所形成阻挡物的高帧图像后,用户可根据实际需要对固定家具所形成阻挡物的高帧图像进行编辑删除。
技术总结
本发明涉及激光雷达测距的技术领域,具体公开了一种激光雷达的室内面积实地勘验方法,包括以下步骤:S1、通过激光雷达扫描系统沿着室内墙体环境进行扫描,获取室内目标数据和图像后并拼接构成室内三维图像,并显示室内三维图采集尺寸数据;S2、在沿着室内墙体环境进行扫描时,同时对室内固定家具表面进行扫描,形成固定家具三维图,并采集固定家具尺寸;S3、将室内三维图和固定家具三维图转换成投影图,并标示尺寸数据,形成户型投影图;S4、得出户型实际可用面积S;S5、将户型投影图、尺寸数据以及实际可用面积S上传至后台服务器,已完成实地勘验记录;该室内面积实地勘验方法解决现有技术中在实地勘察中准确率存在一定偏差,效率较低的问题。
技术研发人员:王志钊,王奇赞,欧鹏飞,戴武,吴显辉,李秀霞,吴威,张征祥,何炜,许田明,刘晓洁,温清馨,龚忠维
受保护的技术使用者:广东烟草韶关市有限公司仁化县分公司
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!