一种相位控制频率分集极化分集的MIMO雷达方法
本发明涉及雷达,尤其涉及一种相位控制频率分集极化分集的mimo雷达方法。
背景技术:
1、与传统的相控阵雷达相比,集中式多输入多输出(multiple-input multiple-output,mimo)雷达技术可以改善角度分辨力,增加可探测目标数量,改善参数识别性能和提高发射/接收波束设计的灵活性。但是,集中式mimo雷达由于发射正交波形而损失了发射相干增益,同时全向发射波束也降低了能量利用率,造成接收端信噪比(signal-to-noiseratio,snr)降低。另外,当mimo雷达遭受主瓣干扰时,其系统性能会明显下降。
2、为了提高mimo雷达的输出端snr或者信干噪比(signal-to-interference plusnoise ratio,sinr),相控阵技术、频率分集阵列技术和极化分集技术被分别应用到mimo雷达中。已有研究成果主要有:
3、(1)aboulnasr hassanien等对集中式mimo雷达的发射阵列进行合理分割,形成了子阵内发射相干信号,子阵间发射相互正交信号,兼具发射相干增益和波形分集增益优势的phased-mimo雷达技术。相较于传统相控阵雷达,phased-mimo雷达通过子阵间发射正交信号,形成了虚拟孔径扩展,提高了目标分辨能力,同时相较于传统mimo雷达,phased-mimo雷达子阵内发射相干信号,提高了雷达功率利用率和接收端snr。该技术的缺点是,接收端波束形成与距离无关,当雷达遭受同角度不同距离的主瓣干扰时,接收波束形成后的输出sinr会严重下降。
4、(2)zhe xiang等将极化分集技术同时应用到mimo雷达的发射端和接收端,提出了一种极化分集mimo(pmimo)雷达技术。在pmimo雷达技术中,发射阵列中的每一个天线单元可以根据需要发射不同极化状态的波形,不同天线单元间的发射波形相互正交。接收阵列中的每一个天线单元采用2维矢量传感器来同时接收回波信号中的水平极化分量和垂直极化分量。该技术使得mimo雷达可以利用极化域信息来抑制主瓣干扰,提高了系统输出sinr。但该技术的接收端波束形成仍然与距离无关,遭受同角度不同距离的主瓣干扰时,接收波束形成后的输出sinr会严重下降。
5、(3)wen-qin wang等将频率分集阵列(frequency diverse array,fda)技术应用到phased-mimo雷达中,提出了一种fs-mimo雷达技术。该技术将整个fda发射阵列划分为多个子阵,子阵内相参地发射相同波形信号,不同子阵间发射信号的波形相互正交。该技术融合了频率分集阵列雷达和phased-mimo雷达的优点,可以实现与距离相关的波束形成性能,且波束形成后的输出端snr和sinr均优于phased-mimo雷达和fda雷达。该技术的缺点是,当转发式扰靠近真实目标时,输出端sinr会严重下降。
技术实现思路
1、本发明的目的在于针对上述现有技术的不足,提供了一种相位控制频率分集极化分集的mimo雷达方法,以提高mimo雷达接收波束形成后的输出snr和sinr。
2、为实现上述目的,本发明采用了如下技术方案:
3、本发明提供了一种相位控制频率分集极化分集的集中式多输入多输出mimo雷达方法,包括以下步骤:
4、s1、给定一个mimo雷达,发射阵列包含个阵元,接收阵列包含个阵元;
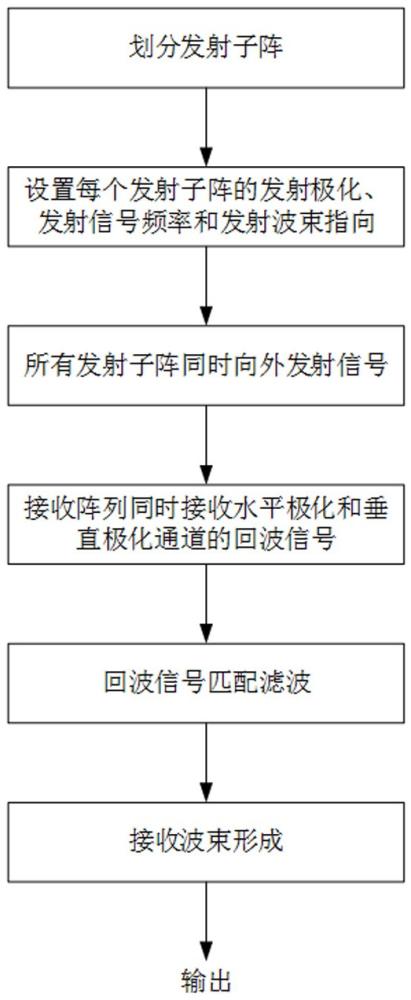
5、s2、对所述发射阵列进行分割,将整个所述发射阵列划分为个发射子阵,每个所述发射子阵包含个阵元;
6、s3、所有所述发射子阵同时向外发射信号,控制每个所述发射子阵的发射相位,使所有发射子波束都指向期望的目标方向;
7、s4、所述接收阵列有个阵元,每一个所述阵元均采用一个2维矢量传感器来同时接收回波信号中的水平极化分量和垂直极化分量,得到路回波信号;
8、s5、利用发射信号对应的种匹配滤波器,分别对整个所述接收阵列接收到的路回波信号进行匹配滤波,得到匹配滤波后的路回波信号;
9、s6、将路回波信号写成回波信号向量的形式;
10、s7、对路回波信号进行接收波束形成。
11、进一步,所述s3具体为:
12、s301、第个所述发射子阵中的所有阵元均以发射极化状态相参地发射信号,发射信号频率为;
13、s302、对第个所述发射子阵施加发射相位控制权向量,使对应的发射子波束指向期望的目标方向;
14、s303、不同所述发射子阵间的发射信号的频率满足公式(1):
15、(1);
16、其中,为基准载频,为控制相邻发射子阵发射信号频率的步进间隔,小于基准载频;
17、s304、不同所述发射子阵的发射信号的波形相互正交,满足公式(2):
18、(2);
19、其中,表示第个发射子阵的发射信号;表示第个发射子阵的发射信号,,表示时间;表示任意时延;表示发射脉冲时宽;表示复数共轭。
20、进一步,所述s6具体为:
21、s601、如果雷达波束覆盖范围内仅包含真是目标,即为噪声背景,则回波信号向量表示为:
22、(3);
23、其中,表示真实目标的回波信号向量;表示噪声信号向量;
24、如果雷达波束覆盖范围内不仅包含真实目标,还有转发式干扰,即为干扰背景,则回波信号向量表示为:
25、(4);
26、其中,表示被雷达接收到的干扰信号向量;
27、s602、目标回波信号向量和干扰信号向量分别为:
28、(5);
29、(6);
30、其中,表示发射子阵的功率控制系数;表示目标回波信号的复系数;表示目标回波信号的联合导向向量;表示目标相对雷达的距离;表示目标相对雷达的方位角;表示干扰个数;表示第个干扰对应的干扰信号复系数;表示第个干扰对应的联合导向向量;表示第个干扰的距离;表示第个干扰的角度。
31、进一步,所述s7具体为:
32、s701、在噪声背景下,采用非自适应波束形成器来进行接收波束的形成,接收波束形成的权向量为:
33、(7);
34、接收波束形成后的系统输出snr按公式(8)进行计算:
35、(8);
36、其中,表示真实目标被雷达照射后的极化散射信息向量;表示目标回波信号的功率;表示噪声信号的功率;表示向量的共轭转置操作;表示取模运算;
37、s702、在干扰背景下,采用最小方差无失真响应波束形成器来进行接收波束形成,接收波束形成权向量为:
38、(9);
39、其中,表示干扰信号加噪声信号的协方差矩阵;表示矩阵的求逆运算;
40、接收波束形成后的系统输出sinr按照公式(10)进行计算:
41、(10)。
42、进一步,所述s602中,目标回波信号的联合导向向量为:
43、<mstyle displaystyle="true" mathcolor="#000000"><msub><mi>u</mi><mi>t</mi></msub><mi>(</mi><msub><mi>r</mi><mi>t</mi></msub><mi>,</mi><msub><mi>θ</mi><mi>t</mi></msub><mi>)</mi><mi>=</mi><mi>b</mi><mi>(</mi><msub><mi>θ</mi><mi>t</mi></msub><mi>)</mi><mi>⊗</mi><mrow><mo>[</mo><mrow><mrow><mo>(</mo><mrow><mi>c</mi><mi>(</mi><msub><mi>θ</mi><mi>t</mi></msub><mi>)</mi><mi>⊙</mi><mi>e</mi><mi>(</mi><msub><mi>θ</mi><mi>t</mi></msub><mi>)</mi><mi>⊙</mi><mi>d</mi><mi>(</mi><msub><mi>r</mi><mi>t</mi></msub><mi>)</mi><mi>⊗</mi><mi>1</mi></mrow><mo>)</mo></mrow><mi>⊙</mi><msub><mi>h</mi><mi>t</mi></msub></mrow><mo>]</mo></mrow></mstyle>(11);
44、其中,表示目标对应的接收导向向量;表示目标对应的发射相控导向向量;表示目标对应的子阵导向向量;表示目标对应的距离导向向量,;表示目标被雷达照射后的极化散射信息向量;表示kronecker积运算;表示hadamard乘积运算。
45、进一步,所述s602中,干扰对应的联合导向向量为:
46、<mstyle displaystyle="true" mathcolor="#000000"><mi>u</mi><mi>(</mi><msub><mi>r</mi><mi>i</mi></msub><mi>,</mi><msub><mi>θ</mi><mi>i</mi></msub><mi>)</mi><mi>=</mi><mi>b</mi><mi>(</mi><msub><mi>θ</mi><mi>i</mi></msub><mi>)</mi><mi>⊗</mi><mrow><mo>[</mo><mrow><mrow><mo>(</mo><mrow><mi>c</mi><mi>(</mi><msub><mi>θ</mi><mi>i</mi></msub><mi>)</mi><mi>⊙</mi><mi>e</mi><mi>(</mi><msub><mi>θ</mi><mi>i</mi></msub><mi>)</mi><mi>⊙</mi><mi>d</mi><mi>(</mi><msub><mi>r</mi><mi>i</mi></msub><mi>)</mi><mi>⊗</mi><mi>1</mi></mrow><mo>)</mo></mrow><mi>⊙</mi><msub><mi>h</mi><mi>i</mi></msub></mrow><mo>]</mo></mrow></mstyle>(12);
47、其中,表示第个干扰对应的接收导向向量;表示第个干扰对应的发射相控导向向量;表示第个干扰对应的子阵导向向量;表示第个干扰对应的距离导向向量;表示第个干扰的极化散射信息向量。
48、本发明的有益效果为:由于mimo雷达的各个发射子阵均为相位控制阵列,且各个子阵对应的发射子波束均指向目标方向,所以使得mimo雷达具有了发射相干增益,提高了发射端能量利用率,对应地提高了接收端信噪比;
49、由于mimo雷达的发射子阵间构成频率分集阵列,所以使得mimo雷达可以获得目标和干扰的距离信息。可以基于目标和干扰在距离域信息的不同,利用自适应波束形成来对同角度、不同距离的主瓣干扰进行有效抑制,提高了输出sinr;
50、第三,由于mimo雷达的发射阵列和接收阵列均采用了极化分集技术,因而可以获得目标和干扰的极化信息。基于目标和干扰在极化域信息的不同,采用自适应波束形成来对靠近真实目标的主瓣干扰进行有效抑制,提高了输出sinr。
- 还没有人留言评论。精彩留言会获得点赞!