一种基于机器视觉的船舶航行路线优化方法、系统及介质与流程
本发明涉及船舶航行领域,特别是一种基于机器视觉的船舶航行路线优化方法、系统及介质。
背景技术:
1、船舶在航行过程中可能会面临多种问题,这些问题涉及到航行安全、船舶性能、环境因素等多个方面。比如遇到强风大浪,可能影响船舶的稳定性,增加搁浅或侧翻的风险,同时降低船舶的可见度,增加导航的困难程度。再者,比如在航道繁忙的情况下,若船舶周边出现其他船舶,则会有碰撞风险或者其他风险生成,对船舶上的资源和人物造成严重损害。上述问题还有其他船舶航行的问题严重影响船舶的正常航行,严重会造成巨额经济损失和人力损失,所以需要实施有效的安全管理措施、定期维护和检查船舶的各种工作参数,并密切关注天气情况和周边情况等,防止船舶在航行过程中出现问题,故提出一种基于机器视觉的船舶航行路线优化方法及系统。
技术实现思路
1、本发明克服了现有技术的不足,提供了一种基于机器视觉的船舶航行路线优化方法及系统。
2、为达到上述目的,本发明采用的技术方案为:
3、本发明第一方面提供了一种基于机器视觉的船舶航行路线优化方法,包括以下步骤:
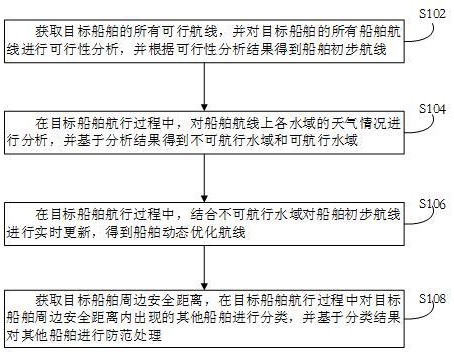
4、获取目标船舶的所有可行航线,并对目标船舶的所有船舶航线进行可行性分析,并根据可行性分析结果得到船舶初步航线;
5、在目标船舶航行过程中,对船舶航线上各水域的天气情况进行分析,并基于分析结果得到不可航行水域和可航行水域;
6、在目标船舶航行过程中,结合不可航行水域对船舶初步航线进行实时更新,得到船舶动态优化航线;
7、获取目标船舶周边安全距离,在目标船舶航行过程中对目标船舶周边安全距离内出现的其他船舶进行分类,并基于分类结果对其他船舶进行防范处理。
8、进一步的,本发明的一个较佳实施例中,所述获取目标船舶的所有可行航线,并对目标船舶的所有船舶航线进行可行性分析,并根据可行性分析结果得到船舶初步航线,具体为:
9、获取目标船舶的起始位置和终点位置,并在大数据网络中获取目标船舶的规格数据,将所述目标船舶的起始位置和终点位置以及目标船舶的规格数据导入历史数据库进行船舶航线检索,得到所有船舶航线;
10、在大数据网络中获取所有船舶航线的平均航行时间,同时获取目标船舶的目标航行时间,并将平均航行时间大于目标航行时间的船舶航线筛除,得到平均航行时间不大于目标航行时间的船舶航线,定义为一类船舶航线;
11、基于一类船舶航线,获取一类船舶航线经过的所有水域,并基于大数据网络判断一类船舶航线经过的所有水域是否存在目标船舶限行水域,若是,则获取目标船舶限行水域的限行时间段;
12、结合一类船舶航线的平均航行时间,分析在不同一类船舶航线下,目标船舶是否在目标船舶限行水域的限行时间段内航行在目标船舶限行水域,若是,则将对应的一类船舶航线筛除,并将剩余的一类船舶航线定义为二类船舶航线;
13、对二类船舶航线进行航线长度分析,并将航线长度最短的二类船舶航线定义为船舶初步航线。
14、进一步的,本发明的一个较佳实施例中,所述在目标船舶航行过程中,对船舶航线上各水域的天气情况进行分析,并基于分析结果得到不可航行水域和可航行水域,具体为:
15、控制目标船舶基于船舶初步航线航行,并在目标船舶航行期间实时获取所有船舶航线上各水域的天气情况集;
16、基于网络气象平台,获取船舶航行会遇到的所有天气情况,并将船舶航行会遇到的所有天气情况进行随机组合,得到船舶航行天气情况集;
17、预设目标船舶的最大摇晃程度和目标船舶的航行标准能见度,并实时获取目标船舶的摇晃程度和目标船舶的航行能见度,当目标船舶的摇晃程度大于最大摇晃程度,或目标船舶航行能见度小于航行标准能见度,则将目标船舶的航行状态标定为危险航行状态;
18、基于历史数据检索,获取在不同船舶航行天气情况集下,目标船舶航行出现危险航行状态的概率,并将目标船舶航行出现危险航行状态的概率大于预设值的对应的船舶航行天气情况集定义为不可航行天气情况集;
19、计算船舶航线上各水域的天气情况集与不可航行天气情况集的相似度,将天气情况集与不可航行天气情况集的相似度大于预设值的船舶航线上的水域定义为不可航行水域,并将天气情况集与不可航行天气情况集的相似度小于预设值的船舶航线上的水域定义为可航行水域。
20、进一步的,本发明的一个较佳实施例中,所述在目标船舶航行过程中,结合不可航行水域对船舶初步航线进行实时更新,得到船舶动态优化航线,具体为:
21、在目标船舶航行过程中,实时监测船舶初步航线是否途径不可航行水域,若否,则控制目标船舶一直基于船舶初步航线航行;
22、若是,则实时监测其他船舶航线是否途径不可航行水域,若存在船舶航线不途径不可航行水域,则将不途径不可航行水域的船舶航线定义为可航行船舶航线,并结合可航行船舶航线的平均航行时间、航线长度和目标船舶限行水域的限行时间段进行综合分析排序,得到船舶第一优化航线;
23、若所有船舶航线均途径不可航行水域,则预测船舶初步航线上所有不可航行水域转变成可航行水域的时间,定义为一类时间,并预测其他船舶航线上所有不可航行水域转变成可航行水域的时间,定义为二类时间;
24、若一类时间小于二类时间,则控制目标船舶一直基于船舶初步航线航行,并在目标船舶航行进入不可航行水域之前停止航行,当不可航行水域中的天气情况集与不可航行天气情况集的相似度小于预设值后,控制目标船舶继续基于船舶初步航线航行;
25、若一类时间大于二类时间,则将其他船舶航线的平均航行时间、航线长度、目标船舶限行水域的限行时间段以及二类时间导入卷积神经网络中进行预测,得到船舶第二优化航线,控制目标船舶一直基于船舶第二优化航线航行,并在目标船舶航行进入不可航行水域之前停止航行,当不可航行水域中的天气情况集与不可航行天气情况集的相似度小于预设值后,控制目标船舶继续基于船舶第二优化航线航行;
26、结合所述船舶第一优化航线、船舶第二优化航线和船舶初步航线,得到船舶动态优化航线,将所述船舶动态优化航线导入目标船舶中,使目标船舶基于船舶动态优化航线航行。
27、进一步的,本发明的一个较佳实施例中,所述获取目标船舶周边安全距离,在目标船舶航行过程中对目标船舶周边安全距离内出现的其他船舶进行分类,并基于分类结果对其他船舶进行防范处理,具体为:
28、基于目标船舶的规格数据,获取目标船舶周边安全距离;
29、在目标船舶航行过程中,实时监测目标船舶周边安全距离内是否存在其他船舶,若是,通过目标船舶上的摄像头,实时获取在目标船舶周边安全距离内出现的其他船舶图像;
30、对所述在目标船舶周边安全距离内出现的其他船舶图像进行图像灰度化处理和图像特征向量提取处理,得到在目标船舶周边安全距离内出现的其他船舶图像的所有图像特征向量,定义为其他船舶特征向量;
31、若目标船舶内含有辅助船舶,则获取所有辅助船舶特征向量,引入余弦度量算法计算所有其他船舶特征向量与所有辅助船舶特征向量之间的余弦值,并预设标准余弦阈值,若其他船舶特征向量与所有辅助船舶特征向量之间的余弦值不在标准余弦阈值范围内,则将对应的其他船舶特征向量定义为离群向量;
32、判断离群向量在所有其他船舶特征向量中的占比,若离群向量在所有其他船舶特征向量中的占比小于预设值,则对应的其他船舶为辅助船舶,若离群向量在所有其他船舶特征向量中的占比大于预设值,则对应的其他船舶为外来船舶;
33、对于辅助船舶,获取辅助船舶的最大航行范围,在目标船舶上实时监控辅助船舶的航行范围,若辅助船舶的航行范围大于最大航行范围,则目标船舶向辅助船舶发送第一警报信号,提醒辅助船舶航行在最大航行范围内;
34、对外来船舶进行分类处理,得到外来船舶分类结果,并基于所述外来船舶分类结果对外来船舶进行防范处理。
35、进一步的,本发明的一个较佳实施例中,所述对外来船舶进行分类处理,得到外来船舶分类结果,并基于所述外来船舶分类结果对外来船舶进行防范处理,具体为:
36、所述外来船舶包括公务船舶和非公务船舶,基于其他船舶特征向量,获取外来船舶的特征向量,并在大数据网络中检索获取所有公务船舶的特征向量;
37、引入余弦度量算法,计算外来船舶的特征向量与所有公务船舶的特征向量之间的余弦值,并基于外来船舶的特征向量与所有公务船舶的特征向量之间的余弦值获取外来船舶与所有公务船舶之间的相似度;
38、预设标准相似度,若所有的外来船舶与任意公务船舶之间的相似度大于标准相似度,则将目标船舶的航行状态标定为第一航行状态,若存在外来船舶与任意公务船舶之间的相似度小于标准相似度,则将目标船舶的航行状态标定为第二航行状态,并将与任意公务船舶之间的相似度小于标准相似度的外来船舶定义为外来非公务船舶;
39、当目标船舶的航行状态为第一航行状态,则控制目标船舶继续基于船舶动态优化航线航行;
40、当目标船舶的航行状态为第二航行状态,则通过目标船舶向外来非公务船舶发送第二警报信号,提醒外来非公务船舶驶出目标船舶周边安全距离;
41、预设外来非公务船舶最大驶出时间,若外来非公务船舶在接收第二警报信号后,且在外来非公务船舶最大驶出时间内未驶出目标船舶周边安全距离,则控制目标船舶进行报警处理。
42、本发明第二方面还提供了一种基于机器视觉的船舶航行路线优化系统,所述船舶航行路线优化系统包括存储器与处理器,所述存储器中储存有船舶航行路线优化方法,所述船舶航行路线优化方法被所述处理器执行时,实现如下步骤:
43、获取目标船舶的所有可行航线,并对目标船舶的所有船舶航线进行可行性分析,并根据可行性分析结果得到船舶初步航线;
44、在目标船舶航行过程中,对船舶航线上各水域的天气情况进行分析,并基于分析结果得到不可航行水域和可航行水域;
45、在目标船舶航行过程中,结合不可航行水域对船舶初步航线进行实时更新,得到船舶动态优化航线;
46、获取目标船舶周边安全距离,在目标船舶航行过程中对目标船舶周边安全距离内出现的其他船舶进行分类,并基于分类结果对其他船舶进行防范处理。
47、本发明解决的背景技术中存在的技术缺陷,本发明具备以下有益效果:对目标船舶的所有船舶航线进行可行性分析,得到船舶初步航线;对船舶航线上各水域的天气情况进行分析,基于分析结果得到不可航行水域和可航行水域;结合不可航行水域和可航行水域,对船舶初步航线进行航线更新,得到船舶动态优化航线,最后对目标船舶周边安全距离内出现的其他船舶进行分类处理和防范处理。本发明能够通过对目标船舶的航线和船舶的周边安全进行详细分析,保护了目标船舶上的资源不受侵害,同时保证目标船舶上的人身安全,使目标船舶能安全到达目的地。
- 还没有人留言评论。精彩留言会获得点赞!