一种天线环境变化情况下的多路径误差修正方法及装置
本发明涉及gnss高精度定位算法,具体涉及一种天线环境变化情况下的多路径误差修正方法及装置。
背景技术:
1、gnss载波差分定位技术以其无需通视、低成本、高精度、实时、连续等优势,在地表变形监测领域中得到了广泛应用。对于短基线而言,算法通过双差数学模型的设计模式,极大地消弱了卫星端、接收机端、电离层与对流层等系统性误差的影响,剩余残差中仅包含多路径误差与随机噪声。在复杂的监测应用环境中,如山体滑坡、大坝沉降等,多路径误差无法被直接忽略,必须进行削弱处理。
2、多路径误差是指卫星信号在传播过程中,除了直射信号直接被地表定位天线所接收外,部分卫星信号经由地表定位天线周围的环境反射或折射后进入天线内,与原始直射信号叠加而形成带有干扰信号的干涉信号,信号中包含的干扰信号即为多路径信号,其对原始信号产生的误差称为多路径误差。针对gnss卫星信号中多路径信号带来的误差影响,众多专业人员进行了大量的针对性研究。削弱多路径误差对定位结果影响的方式主要分为基于硬件设计的方法与基于软件的方法两大类。基于硬件设计的方法是指对gnss硬件设备进行特殊设计,如使用扼流圈天线、双极化天线、多路径估计延迟锁定环、“窄相关器”延迟锁定环,以削弱多路径误差的影响。该类方法可改善天线增益模式以削弱多路径,但削弱效果有限,而且硬件成本较高。基于软件的方式通过特定的数据处理技术将载波与伪距观测值中的多路径误差进行提取并削弱,包括数据后处理与实时多路径模型改正两类。数据后处理方法包括利用gnss观测值中的信噪比snr方法、小波分析方法、卡尔曼滤波方法、经验模态分解方法、具有交叉验证的vondrak滤波器等;实时多路径模型改正主要利用多路径效应在不变环境下具有强时空重复性这一特征,基于一段时期的历史数据将多路径误差值进行提取并建模,用以后续计算过程的实时多路径误差改正,主要包括sf模型与mhm模型等。sf方法基于每个恒星日gps卫星的重复星座的特点,利用改正值去削弱后续恒星日内对应历元的观测值多路径。随后,maf、asf等模型被相继开发出来。mhm模型基于多路径效应具有空间域重复性的特征而建立。卫星信号在不同轨道周期内从相同的方位角和高度角位置入射所产生的多路径效应是一致的。mhm模型在方位角与高度角两个维度将天空图划分为等间距格网,常用的格网分辨率有1o*1o,2o*2o以及5o*5o,并通过格网内所有卫星信号的验后残差值提取出对应的多路径校正值。
3、在利用gnss定位技术进行地表变形监测的应用中,监测目标一般处于环境较为复杂多变的山区或人为干扰严重的施工现场,例如在植被茂密的山区进行变形监测时,gnss天线周围的植被随季节而周期性变化,导致经其表面反射或折射的信号传输路径也发生变化,进行引发多路径误差的改变。此外,在人工活动干预较大的场景中,例如施工中的基坑变形监测,在gnss监测天线周围常伴随采挖或回填等活动,也容易导致多路径误差的改变。已有关于多路径误差模型均基于天线周围环境不变的假设而建立,一旦天线周围环境发生改变,已有多路径误差模型即不再适用。
4、综上所述,现有的技术与应用发展存在以下问题:已有多路径误差模型条件较为苛刻,无法满足变形监测实际工程应用的场景需求;在gnss天线周围环境发生改变后,传统的多路径误差修正模型需要重新积累5~7个卫星轨道重复周期(对于gps为5~7天,对于北斗则超过1个月)的观测数据进行重新建模,这期间原有多路径误差模型不再适用,无法保证定位精度的可靠性。
技术实现思路
1、针对现有技术中存在的缺陷,本发明的目的在于提供一种天线环境变化情况下的多路径误差修正方法及装置,能够解决现有技术中gnss天线周围环境发生改变后,传统的多路径误差修正模型需要长时间的数据进行重新建模,导致无法保证定位精度可靠性的问题。
2、为达到以上目的,本发明采取的技术方案是:
3、一方面,本发明提供一种天线环境变化情况下的多路径误差修正方法,包括以下步骤:
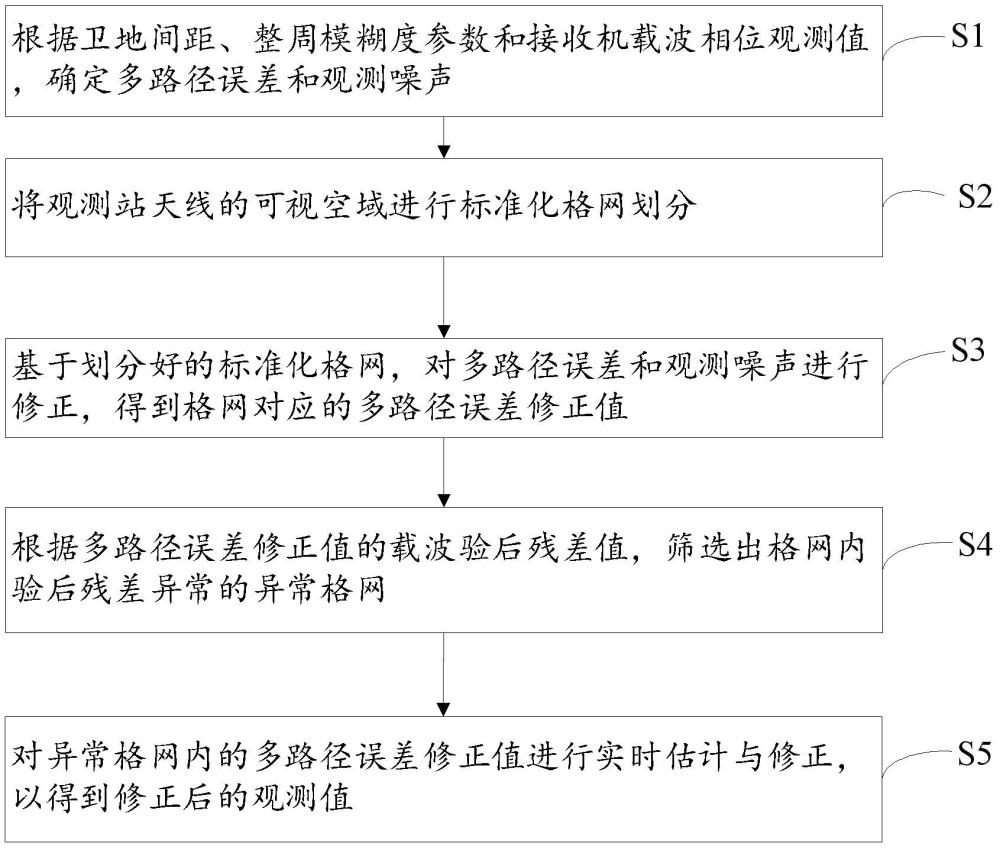
4、根据卫地间距、整周模糊度参数和接收机载波相位观测值,确定多路径误差和观测噪声;
5、将观测站天线的可视空域进行标准化格网划分;
6、基于划分好的标准化格网,对多路径误差和观测噪声求均值,得到格网对应的多路径误差修正值;
7、根据多路径误差修正值修正后的载波验后残差值,筛选出格网内验后残差异常的异常格网;
8、对异常格网内的多路径误差修正值进行实时估计与修正,以得到修正后的定位结果。
9、在一些可选的方案中,所述的根据卫星与观测站之间间距、整周模糊度参数和接收机载波相位观测值,确定多路径误差和观测噪声,包括:
10、根据公式,确定多路径误差和观测噪声;
11、其中,为流动站;为基准站;为信号频点;为观测卫星;为基准卫星;为双差计算符号;表示载波信号波长;表示接收机载波相位观测值;为卫星与观测站之间间距;为整周模糊度参数;为载波多路径误差;为的未模型化误差和观测噪声。
12、在一些可选的方案中,将观测站天线的可视空域按照1o*1o、2o*2o或者5o*5o进行标准化格网划分。
13、在一些可选的方案中,所述的基于划分好的标准化格网,对多路径误差和观测噪声求均值,得到格网对应的多路径误差修正值,包括:
14、根据公式,确定格网对应的多路径误差修正值;
15、其中,表示格网中心点方位角为az,高度角为el;为对应格网的多路径误差修正值;为格网内信号总数;为格网内信号序号;为格网内第条信号对应的多路径误差项;为格网内第条信号对应的噪声项。
16、在一些可选的方案中,所述的根据多路径误差修正值修正后的载波验后残差值,筛选出格网内验后残差异常的异常格网,包括:
17、基于多路径误差修正值,根据卫地间距、整周模糊度参数和接收机载波相位观测值,确定多路径误差修正值的载波验后残差值;
18、根据多路径误差修正值的载波验后残差值是否符合高斯分布,筛选出格网内验后残差异常的异常格网。
19、在一些可选的方案中,根据公式,确定多路径误差修正值的载波验后残差值;
20、其中,为流动站;为基准站;为信号频点;为观测卫星;为基准卫星;为双差计算符号;为载波信号波长;表示接收机载波相位观测值;为卫星与观测站之间间距;为整周模糊度参数;为对应格网的多路径误差修正值。
21、在一些可选的方案中,所述的根据多路径误差修正值的载波验后残差值是否符合高斯分布,筛选出格网内验后残差异常的异常格网,包括:
22、根据公式,确定载波验后残差值以格网为单位多径异常检验量,其中,为载波验后残差值以格网为单位多径异常检验量,n为格网内验后残差的个数;
23、根据公式,确定载波验后残差值以格网为单位多径异常检验量的阈值,为格网内多路径误差修正值的置信度;
24、根据载波验后残差值以格网为单位多径异常检验量及其对应的阈值,判断载波验后残差值是否符合高斯分布,以筛选出格网内验后残差异常的异常格网。
25、在一些可选的方案中,根据公式,确定格网内多路径误差修正值的置信度,n为格网内信号总数,为格网内第条信号对应的多路径误差。
26、在一些可选的方案中,所述的对异常格网内的多路径误差修正值进行实时估计与修正,以得到修正后的定位结果,包括:
27、对于部分格网为多路径异常格网的情况,将正常格网提供的多路径误差修正值带入方程作为约束条件,并将异常格网的多路径误差修正值作为待估计的位置参数,通过lambda方法求解gnss双差观测方程中的模糊度参数;
28、将模糊度参数带入gnss双差观测方程,求得异常格网多路径误差修正值,对异常格网内对应卫星载波信号进行实时多路径误差修正,同时获取多路径误差修正后参数;
29、基于概略接收机坐标,根据多路径误差修正后参数,获得修正后接收机位置坐标。
30、第二方面,本发明还提供一种天线环境变化情况下的多路径误差修正装置,包括:
31、误差噪声确定模块,其用于根据卫地间距、整周模糊度参数和接收机载波相位观测值,确定多路径误差和观测噪声;
32、格网划分模块,其用于将观测站天线的可视空域进行标准化格网划分;
33、误差修正模块,其用于基于划分好的标准化格网,对多路径误差和观测噪声求均值,得到格网对应的多路径误差修正值;
34、异常格网筛选模块,其用于根据多路径误差修正值修正后的载波验后残差值,筛选出格网内验后残差异常的异常格网;
35、观测结果修正模块,其用于对异常格网内的多路径误差修正值进行实时估计与修正,以得到修正后的定位结果。
36、与现有技术相比,本发明的优点在于:本方案通过多路径误差修正值的载波验后残差值,筛选出格网内验后残差异常的异常格网;对异常格网内的多路径误差修正值进行实时估计与修正,以得到修正后的观测值,能够解决现有多路径误差修正模型局限于天线周围环境静止不变的场景限制,主要针对地表变形监测过程中可能存在的环境改变的应用场景,在已有多路径误差修正模型的基础上对环境变化引发的多路径异常变化的信号入射区域进行提取,对异常多路径入射区域内的未知多路径进行重新估计与修正;很好地解决了传统多路径误差模型在环境改变后需要重新积累5~7个轨道周期的观测数据的局限性,具有使用度高、自主性强,且无需重新建模与数据积累的优点。
- 还没有人留言评论。精彩留言会获得点赞!