一种船舶轴系支撑结构的监测方法及系统
本发明属于数据采集、船舶轴系,具体涉及一种船舶轴系支撑结构的监测方法及系统。
背景技术:
1、船舶轴系由推力轴、中间轴、尾轴、螺旋桨轴、联轴器、推力轴承、中间轴承以及尾管轴承组成,作用于将电机产生的动力转变为船舶航行的推力。当轴系发生故障时则导致摩擦和振动增加,进而降低轴系效率并影响整个船舶推进系统的效率和安全性。
2、传统船舶设计通常将轴系和电机安装在刚性支撑结构上,然而随着船舶减振技术的发展传统的刚性支撑已经无法满足要求,轴系产生的振动能量会通过刚性支撑结构传递到船体,引发多通道振动并产生声辐射,从而影响船舶的减振和隐蔽性能。因此当代船舶倾向采用柔性结构作为支撑,将主机及轴系安装在柔性筏架上并在筏架上配置多个气囊隔振器。
3、传统的轴系故障监测方法通过在不同轴承上安装各种传感器,监测压力、温度、转速等参数以判断轴系是否发生故障。然而这种传统监测方法只考虑到轴系本身受到的外界应激影响,忽略了内部结构中柔性支撑对轴系的直接影响,进而在进行动力学分析时会引起分析误差,传统监测方法通常为在实验室模拟试验中获得气囊隔振器的固定气压参数,而并不会根据海上环境和工况变化做出实时的调整,也不会监测柔性支撑发生的形变,即对柔性结构的适应性分析程度并不完整。柔性支撑在受到水流冲击、海水腐蚀、温度变化、工况变化等外界影响时会发生的形变,会直接影响到其支撑的轴系的稳定性,引发轴承发生变位,为船舶推进系统的效率和安全性带来风险。因此在轴系健康监测中须全面考虑柔性支撑结构对轴系的影响,以实现更全面和准确的故障诊断。
技术实现思路
1、本发明的目的在于提出一种船舶轴系支撑结构的监测方法及系统,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
2、为了实现上述目的,根据本发明的一方面,提供一种船舶轴系支撑结构的监测方法,所述方法包括以下步骤:
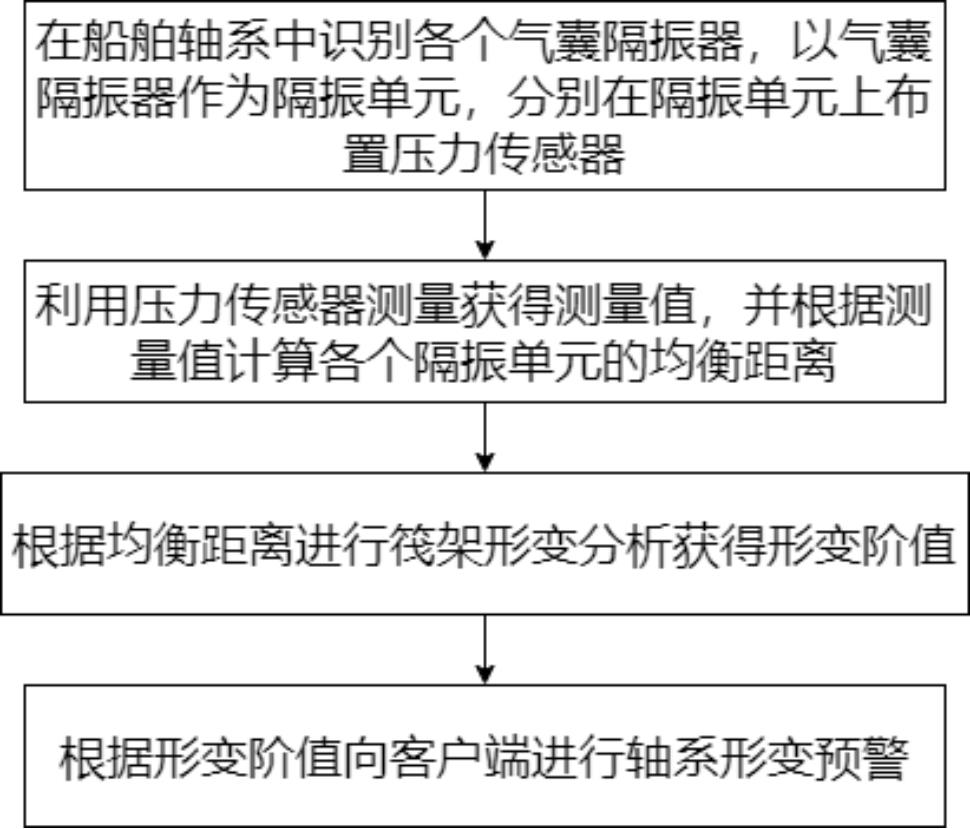
3、s100,在船舶轴系中识别各个气囊隔振器,以气囊隔振器作为隔振单元,分别在隔振单元上布置压力传感器;
4、s200,利用压力传感器测量获得测量值,并根据测量值计算各个隔振单元的均衡距离;
5、s300,根据均衡距离进行筏架形变分析获得形变阶值;
6、s400,根据形变阶值向客户端进行轴系形变预警。
7、进一步地,在步骤s100中,在船舶轴系中识别各个气囊隔振器,以气囊隔振器作为隔振单元,分别在隔振单元上布置压力传感器的方法是:船舶的轴系安装在柔性筏架上,柔性筏架的肋板或者下板安装有若干个气囊隔振器,以安装在下板的气囊隔振器作为隔振单元,分别在各个隔振单元上布置压力传感器;其中气囊隔振器包括鼓型橡胶气囊隔振器和长圆形囊式气囊隔振器中的任意一种;在每个气囊隔振器的位置均安装一个压力传感器;压力传感器为荷重传感器、应力传感器或压电式传感器中的任意一种。
8、进一步地,在步骤s200中,利用压力传感器测量获得测量值,并根据测量值计算各个隔振单元的均衡距离的方法是:各个隔振单元通过压力传感器实时测量获得测量值;若一个时刻较其前一个时刻和其后一个时刻的测量值都大,则定义该时刻发生压力攀升;设定一个时间段作为反馈间隔rt,rt∈[1,3]分钟,每隔一个反馈间隔定义一个时刻为反馈点,定义一个反馈点与其逆时间方向的首个反馈点之间的时间区间为该反馈点的反馈区间;获取反馈区间内各个发生压力攀升的时刻对应的测量值,并计算所得各个测量值的平均值作为攀升期望,获取反馈区间内各个测量值的平均值为均衡期望;将攀升期望与均衡期望的比值记为攀升比例ovt,将同一反馈点下各个隔振单元的攀升比例的平均值记为攀升均衡度e.ovt,则该反馈点下任一隔振单元的均衡距离bds为:bds=ln(1+ovt/e.ovt)。
9、进一步地,在步骤s300中,根据均衡距离进行筏架形变分析获得形变阶值的方法是:设定一个时间段tgcb,tgcb∈[40,80]分钟;对于一个隔振单元,定义其在最近tgcb时段中均衡距离的上四分位值为第一距离,当一个反馈点下的均衡距离大于等于第一距离则定义该反馈点发生越界事件;
10、将同一反馈点下各个隔振单元的均衡距离的最大值记为第二距离;同一反馈点下发生越界事件的隔振单元的数量为该反馈点的越界阶值;若一个反馈点较其前一个和后一个反馈点的越界阶值都大,则定义该反馈点为一阶越界点;以任意一阶越界点作为当前越界点,从当前越界点逆时间方向遍历各个反馈点,直到各个隔振单元均发生越界事件,则定义最后遍历的反馈点为当前越界点的一阶回归点;当前越界点到其对应一阶回归点的各个反馈点构成集合并记为回归集;
11、以任意隔振单元作为当前隔振单元;根据均衡距离和第二距离计算一阶越界点的骤变比例ptr:;分别以sc.olst和sc.elst代表当前隔振单元在当前越界点的均衡距离和第二距离,分别以e.olst和e.elst代表当前隔振单元对应回归集中各个均衡距离和各个第二距离的平均值;计算当前隔振单元的形变阶值sv_rsk:
12、;
13、其中i1为累加变量,nfr代表回归集的数量,lopi1为第i1个回归集中反馈点的数量,ptri1代表第i1个回归集的骤变比例;xta代表当前隔振单元所有均衡距离的标准差,e为自然常数,tmp为当前反馈点的均衡距离;e.olsti1代表第i1个回归集中各个均衡距离的平均值。
14、由于形变阶值是通过对各个均衡距离进行分类筛选后计算获得,有效地将隔振单元下的均衡距离量化形成数据,然而在连续的均衡距离变化较小的情况下,利用上述方法所算出的形变阶值可能会出现量化程度不足的现象,这是因为这个方法对差异较小的数据具有较弱的敏感性,无法较为准确地分类筛选这类数据,导致处理所得的形变阶值出现欠拟合问题,而目前尚未存在可行的技术来弥补这个方法带来的量化不足现象,为消除均衡距离变化较小导致分类筛选不合理对形变阶值计算出现欠拟合的影响,本发明提出了一个更优选的方案:
15、进一步地,其特征在于,在步骤s300中,根据均衡距离进行筏架形变分析获得形变阶值的方法是:设定一个时间段tgca,tgca∈[10,30]分钟,以任意隔振单元作为当前隔振单元;获取当前隔振单元tgca时间段内不同反馈点下均衡距离的值形成一个序列记作形变分析序列;将形变分析序列内极大值和极小值所对应的反馈点分别记作险变反馈点和稳变反馈点;将险变反馈点和稳变反馈点定义为第一条件时刻;计算获得形变分析序列内小于上四分位的各个均衡距离的平均值记作稳形距离;获取任一反馈点下均衡距离与稳形距离的差值并取绝对值,然后将其与稳形距离相除得到比值,将该比值记作反馈点的形变阈比;
16、若以当前反馈点逆时间搜索获得的首个第一条件时刻为稳变反馈点,则将其作为压变起点,否则将当前反馈点作为压变起点;以压变起点逆时间顺序遍历各个反馈点划分压变区间:将压变起点与遍历反馈点的均衡距离作差并取绝对值,再与遍历反馈点下的均衡距离相除,所得值为遍历反馈点的子形变阈比,当子形变阈比不小于压变起点的形变阈比,或者遍历反馈点为险变反馈点,则停止遍历并将遍历反馈点作为压变终点,将压变起点与压变终点之间的各个反馈点划分为一个压变区间;若压变终点不为险变反馈点,则定义其逆时间方向的首个反馈点为新的压变起点,否则定义其逆时间方向的首个稳变反馈点为新的压变起点,继续在形变分析序列内划分压变区间;
17、获取任一压变区间内各个均衡距离,将其中的中位值与稳形距离的差值作为该压变区间的压衡差距;若压变区间的压衡差距小于零,则将该压变区间内各个均衡距离的最大值与稳形距离的均方根值记为第一形变参,否则将该压变区间内各个均衡距离的最小值与稳形距离的均方根值记为第一形变参,将第一形变参与压变区间极差的比值记作变距调整系数;
18、对当前隔振单元的任一压变区间,分别获取各个隔振单元在该压变区间的极差记为压变负载,将各个隔振单元的压变负载的平均值和最大值记为负载阈值和负载基值,若当前隔振单元在该压变区间的压变负载大于负载阈值,则定义该压变区间为增压区间,当前隔振单元在增压区间的增压负载为的负载基值与压变负载的差值;
19、通过增压负载和变距调整系数计算隔振单元的形变阶值sv_rsk:
20、;
21、其中j1为增压区间的序号,j2为压变区间的序号,srqtlj1和srqtlj2分别为第j1个增压区间和第j2个压变区间的变距调整系数,tvdnq为形变分析序列内不属于压变区间的各个反馈点下的均衡距离的平均值,lbdj1为除第j1个增压区间的增压负载,exp()为以自然数e为底数的指数函数;sqrt()为平方根函数,通过平方根函数返回调用值的平方根值;mean{}为平均值函数,通过平均值函数返回调用数据集的平均值;exp()为自然常数e为底数的指数函数;
22、有益效果:由于形变阶值是通过在柔性筏架配置的气囊隔振器上安装的压力传感数据进行实时分析,高效量化了基于柔性筏架的船舶轴系支撑结构在外界刺激中发生的形变风险,为识别和防范柔性支撑形变引起的轴承变位等轴系故障提供可靠数理支撑,为降低单独考虑轴系本身受外界影响引起故障的诊断误差风险提供分析依据。
23、进一步地,在步骤s400中根据形变阶值向客户端进行轴系形变预警的方法是:把所有隔振单元在同一个反馈点下获得的形变阶值构成元组并记为该反馈点的形变风险组;任一形变风险组内各个元素的平均值和极差分别记为风险组水平和风险组振幅;预设第一时间区间tsz,tsz∈[1,2]小时;预设第二时间区间tsz_s为tsz_s=1/4×tsz;
24、定义任一反馈点前tsz时段中各风险组水平的平均值为风险组基值;若一个反馈点的风险组水平大于风险组基值,并且该反馈点较其前一个反馈点的风险组水平大,则定义该反馈点满足第一异常条件;若一个反馈点较其前一个反馈点的风险组振幅大,则定义该反馈点发生振幅增溢;定义任一反馈点前tsz_s时段内各反馈点中,发生振幅增溢的反馈点的比例为增益比例;
25、如果当前反馈点的增益比例较其前tsz_s时段内所有增益比例都大,则向管理员的客户端发送轴系形变预警;将当前反馈点的形变风险组作为实时组,将当前tsz时段内各个满足第一异常条件的反馈点对应形变风险组作为观测组,将实时组和观测组发送到管理员客户端。
26、进一步地,服务器通过搜集的实时组和观测组进行机器学习模型建立,其中机器学习模型为梯度提升树模型或者支持向量机模型;通过构建模型可进一步提升预警精确性。
27、优选地,其中,本发明中所有未定义的变量,若未有明确定义,均可为人工设置的阈值。
28、本发明还提供了一种船舶轴系支撑结构的监测系统,所述一种船舶轴系支撑结构的监测系统包括:处理器、存储器及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现所述一种船舶轴系支撑结构的监测方法中的步骤,所述一种船舶轴系支撑结构的监测系统可以运行于桌上型计算机、笔记本电脑、掌上电脑及云端数据中心等计算设备中,可运行的系统可包括,但不仅限于,处理器、存储器、服务器集群,所述处理器执行所述计算机程序运行在以下系统的单元中:
29、传感器预设单元,用于在船舶轴系中识别各个气囊隔振器,以气囊隔振器作为隔振单元,分别在隔振单元上布置压力传感器;
30、数据测量单元,用于利用压力传感器测量获得测量值,并根据测量值计算各个隔振单元的均衡距离;
31、形变分析单元,用于根据均衡距离进行筏架形变分析获得形变阶值;
32、预警触发单元,用于根据形变阶值向客户端进行轴系形变预警。
33、本发明的有益效果为:本发明提供一种船舶轴系支撑结构的监测方法及系统,通过在柔性筏架配置的气囊隔振器上安装的压力传感数据进行实时分析,高效量化了基于柔性筏架的船舶轴系支撑结构在外界刺激中发生的形变风险,为识别和防范柔性支撑形变引起的轴承变位等轴系故障提供可靠数理支撑,为降低单独考虑轴系本身受外界影响引起故障的诊断误差风险提供分析依据。通过对柔性结构的适应性分析程度完善,对船舶轴系内部结构中柔性支撑对轴系的直接影响进行实时监测,进而提高了支撑的轴系的稳定性,保证船舶推进系统的安全性可长期运行下的船舶轴系状态稳定。
- 还没有人留言评论。精彩留言会获得点赞!