一种配电线路隐患识别系统、方法及电子设备与流程
本发明涉及线路巡检,具体涉及一种配电线路隐患识别系统、方法及电子设备。
背景技术:
1、配电网是电网通往用电单位的最后一环节,分布范围广、设备基数大,种类、型号繁多,新旧设备混杂运行,质量良莠不齐,运维压力极大。
2、我国现存配电网网架结构仍以架空线路为主,配电变压器、配电开关等多种设备沿线路大量配置,线路及沿线设备常年暴露在户外,不同地区电网建设水平不同,运维可投入的人力物力也各有差别;受气候、环境温湿度、空气污染等因素影响,配电线路常年发生大量隐患缺陷引起的停电故障。据统计,配网架空线路及沿线设备故障中,绝缘故障在其中占绝大多数,而这些绝缘故障全部由多种表征明显的缺陷和表征不明显的隐患引起。目前,在配电线路分布广、线路分支多的情况下,人员沿线手持移动设备步行巡检的方式效率极低,现有人力仅能对很小一部分比例的线路完成检测,大量的隐患缺陷被遗漏造成故障率居高不下。因此,亟需一种检测准确且高效的识别系统及识别方法。
技术实现思路
1、本发明的主要目的是提供一种配电线路隐患识别系统、方法及电子设备,旨在解决现有技术中配电线路隐患识别效率低、准确性低的技术问题。
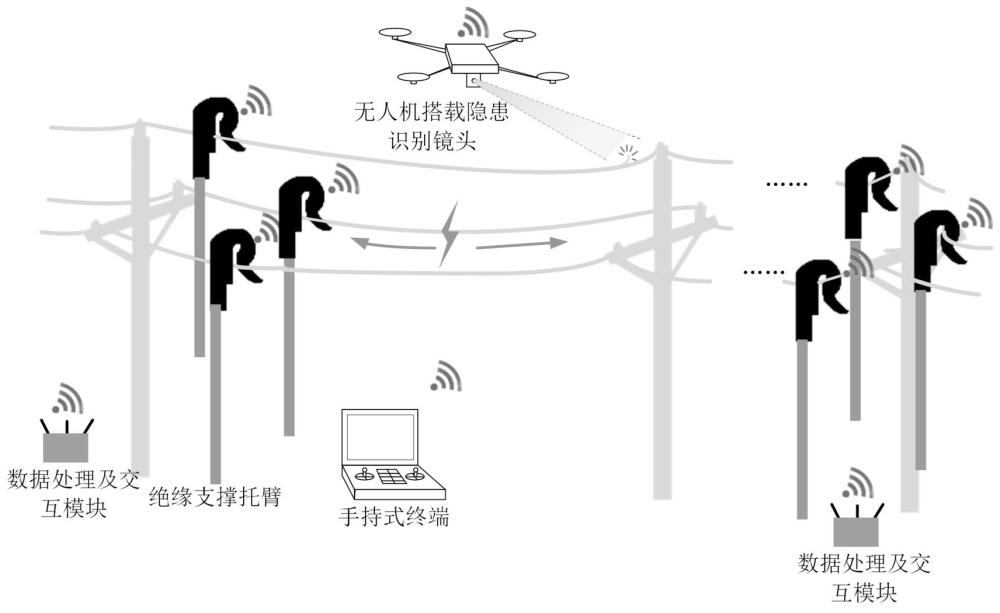
2、为实现上述目的,第一方面,本技术实施例中提供了一种配电线路隐患识别系统,用于配电线路的隐患识别,所述配电线路沿长度方向具有多个节点,所述系统包括:
3、信号传感模块,所述信号传感模块分别设于所述配电线路的多个节点上,用于获取配电线路的局部放电脉冲电流信号;
4、无人机,所述无人机用于获取配电线路的外观缺陷及发热缺陷,包括摄像模块及红外热检测模块;
5、数据处理交互模块,所述数据处理交互模块与所述信号传感模块对应设置并行通信,用于接收并处理信号传感模块和无人机发送的数据或信号;
6、手持终端,所述手持终端用于控制所述无人机的飞行,以及接收数据处理交互模块和无人机发送的数据或信号。
7、进一步的,所述数据处理交互模块包括远距离匹配单元、滤波单元、数据处理单元以及无线通讯同步单元,其中,所述无线通讯同步单元用于与信号传感模块、无人机进行无线通讯,所述远距离匹配单元用于不同节点位置的各个数据处理交互模块间的远程匹配协同,所述滤波单元用于滤除电流信号中的干扰电磁信号,所述数据处理单元用于对电流信号和/或数据进行分析处理。
8、进一步的,所述系统还包括辅助安装架,所述辅助安装架包括绝缘支撑托臂及与所述绝缘支撑托臂连接的卡钳,所述卡钳被配置为连接所述信号传感模块、数据处理交互模块以将所述信号传感模块、数据处理交互模块装配在配电线路上。
9、第二方面,本技术实施例中还提供了一种配电线路隐患识别方法,应用于隐患识别系统,所述隐患识别系统包括固定检测设备及飞行检测设备,所述固定检测设备包括信号传感模块及数据处理交互模块,所述飞行检测设备包括无人机及手持终端,所述方法包括:
10、基于配电线路的长度信息及分支信息确定所述固定检测设备的目标节点位置;
11、响应于所述目标节点位置配置有所述固定检测设备,获取所述目标节点上固定检测设备感测到的局部放电脉冲电流信号;
12、基于所述局部放电脉冲电流信号确定配电线路放电隐患位置信息;
13、基于所述配电线路放电隐患位置信息确定与所述配电线路放电隐患位置相关联的非放电隐患位置信息;
14、控制所述飞行检测设备在所述放电隐患位置及非放电隐患位置进行缺陷检测,其中,所述缺陷检测包括外观缺陷检测及发热缺陷检测。
15、进一步的,所述基于配电线路的长度信息及分支信息确定所述固定检测设备的目标节点位置,包括:
16、控制无人机飞行巡检以获取配电线路中目标长度跨度参数及目标分支参数;
17、在所述目标长度跨度参数及目标分支参数满足预设参数值时,确定所述目标长度跨度参数对应的跨度中间位置为所述目标节点位置,以及确定所述目标分支参数对应的分支位置为所述目标节点位置。
18、进一步的,所述基于所述局部放电脉冲电流信号确定配电线路放电隐患位置信息,包括:
19、提取所述局部放电脉冲电流信号的特征参数,其中,所述特征参数包括信号幅值参数;
20、将所述局部放电脉冲电流信号的信号幅值参数输入距离预估模型中得到放电隐患位置与所述目标节点上固定检测设备的距离信息;
21、基于所述距离信息确定配电线路放电隐患位置信息;
22、其中,所述距离预估模型满足如下表达式:
23、fl(d0)-10nlg(d/d0) ;
24、为目标节点上固定检测设备获取的局部放电脉冲电流信号的信号幅值,fl(d0)为基准参考幅值,n为路径损耗指数,用于表征信号随距离衰减的速率,d和d0分别为实际距离和参考距离。
25、进一步的,所述将所述局部放电脉冲电流信号的信号幅值参数输入距离预估模型中得到放电隐患位置与所述目标节点上固定检测设备的距离信息之后,还包括对所述距离信息进行校正,所述对所述距离信息进行校正满足如下校正模型表达式:
26、fl(d0)-10(1+β1)nlg(d/d0) (d≥d0);
27、fl(d0)-10(1+β2)nlg(d/d0) (d<d0);
28、为目标节点上固定检测设备获取的局部放电脉冲电流信号的信号幅值,fl(d0)为基准参考幅值,n为路径损耗指数,用于表征信号随距离衰减的速率,d和d0分别为实际距离和参考距离,β1为d≥d0时的校正系数,β2为d<d0时的校正系数,并且β1>β2,β1、β2的取值与电线所处环境的粉尘颗粒度呈正相关关系。
29、进一步的,所述基于所述配电线路放电隐患位置信息确定与所述配电线路放电隐患位置相关联的非放电隐患位置信息,包括:
30、基于所述配电线路放电隐患位置信息确定配电线路的配电类型;
31、基于所述配电类型查询配电关联映射表以得到关联方位信息及关联距离信息;
32、根据所述关联方位信息、关联距离信息以及配电线路放电隐患位置信息确定所述非放电隐患位置信息。
33、进一步的,所述控制所述飞行检测设备在所述放电隐患位置及非放电隐患位置进行缺陷检测,包括:
34、基于预先训练的巡检航线控制所述飞行检测设备在所述放电隐患位置及非放电隐患位置进行缺陷检测。
35、第三方面,本技术实施例中还提供了一种电子设备,包括存储器及处理器,所述存储器用于存储程序代码,所述处理器用于调用所述程序代码,以执行如第二方面所述的方法。
36、区别于现有技术,本技术实施例提供的隐患识别系统包括固定检测设备及飞行检测设备,所述固定检测设备包括信号传感模块及数据处理交互模块,所述飞行检测设备包括无人机及手持终端,并且将信号传感模块及数据处理交互模块设置在配电线路的目标节点上,可以减少局部放电脉冲电流信号获取过程中大气环境的电磁干扰,以提高局部放电脉冲电流信号获取的准确性,从而提高隐患识别的准确性。
37、进一步,本技术实施例提供的隐患识别方法,首先基于配电线路的长度信息及分支信息确定固定检测设备的目标节点位置;然后响应于所述目标节点位置配置有所述固定检测设备,获取所述目标节点上固定检测设备感测到的局部放电脉冲电流信号;然后再基于所述局部放电脉冲电流信号确定配电线路放电隐患位置信息;再基于所述配电线路放电隐患位置信息确定与所述配电线路放电隐患位置相关联的非放电隐患位置信息;最后控制所述飞行检测设备在所述放电隐患位置及非放电隐患位置进行缺陷检测,其中,所述缺陷检测包括外观缺陷检测及发热缺陷检测。也即,首先根据配电线路的状况确定固定检测设备的目标安装位置,然后根据固定检测设备获取到的局部放电脉冲电流信号确定配电线路放电隐患位置信息,再根据配电线路放电隐患位置信息确定关联的非放电隐患位置,最后对通过无人机对放电隐患位置信息及非放电隐患位置进行全方面的缺陷检测,如此,可以提高配电线路隐患识别的准确性及识别效率。
- 还没有人留言评论。精彩留言会获得点赞!