深度学习风廓线雷达全波束的三维风场反演方法及系统与流程
本技术涉及气象探测与数据处理,特别涉及一种深度学习风廓线雷达全波束的三维风场反演方法及系统。
背景技术:
1、风是灾害性天气形成和演变的关键因子,观测的风场信息对局地中小尺度系统的分析与预报有着十分关键的作用。传统的探空观测虽能提供不同高度的风场信息,但不仅时间分辨率低,一般每日两次观测,而且空间分辨率也非常低。常规地面观测能提供逐小时近地面风场观测,但是缺少对风场垂直结构的完整描述,且地面风观测资料的质量控制也是一个问题。为了完善三维风场信息的观测,风廓线雷达最大的探测优势是具有高时空分辨率,探测周期不超过6分钟,垂直分辨率为几十米到几百米,可以很好地弥补常规观测时空密度不高的缺陷。
2、由于风廓线雷达主要是利用大气湍流对电磁波的散射作用来进行大气风场等要素的探测,因此,当大气湍流信号较弱时容易受到各种非气象目标物的干扰,造成对风廓线雷达资料的污染,影响雷达数据的质量,进而影响雷达探测水平风的精度。此外,三维风场不仅与测站上空的风廓线雷达采样功率谱数据密切相关,还与风廓线雷达原始数据rad各个方向探测波束(径向速度、谱宽和信噪比)等息息相关。然而在目前常用的风廓线雷达质量控制方法中,风场的订正主要基于单一的回波功率谱密度数据质控方法,很少涉及风廓线雷达原始数据rad全波束(各个方向)的三维探测数据。而利用解超定方程组的新方法对风廓线雷达全波束进行反演得到三维反演风,能有效提高三维反演风的计算质量。
3、近年来,随着人工智能算法的快速发展和海量气象数据的不断积累,基于人工神经网络的风廓线雷达质控方法变得可行,其旨在采用机器学习方法从数据中自动提取更有效的信息,并在改善不同高度的水平风场(3d)上展现出了巨大的潜能。深度学习模型cu-net是一种基于卷积神经网络的深度学习方法,将要素的偏差订正问题,转换为适合于深度学习的“图像到图像”的气象信息翻译问题,并且可对海量数据结果进行非线性特征学习和偏差订正,但目前很少被用于风廓线雷达反演风的订正中。
4、因此,现有的三维风场反演方法没有考虑风的逐小时变化误差和复杂地形对风场的影响,同时在训练模型上,现有的深度学习的神经网络收集深浅层特征的能力不足,使得计算出的三维反演风的订正值不够准确,影响探测的三维风场质量。
技术实现思路
1、基于此,本技术提出一种深度学习风廓线雷达全波束的三维风场反演方法及系统,旨在解决现有的三维风场反演方法没有考虑风的逐小时变化误差和复杂地形对风场的影响,同时在训练模型上,现有的深度学习的神经网络收集深浅层特征的能力不足,使得计算出的三维反演风的订正值不够准确,影响探测的三维风场质量的问题。
2、实施例的第一方面提供了一种深度学习风廓线雷达全波束的三维风场反演方法,包括:
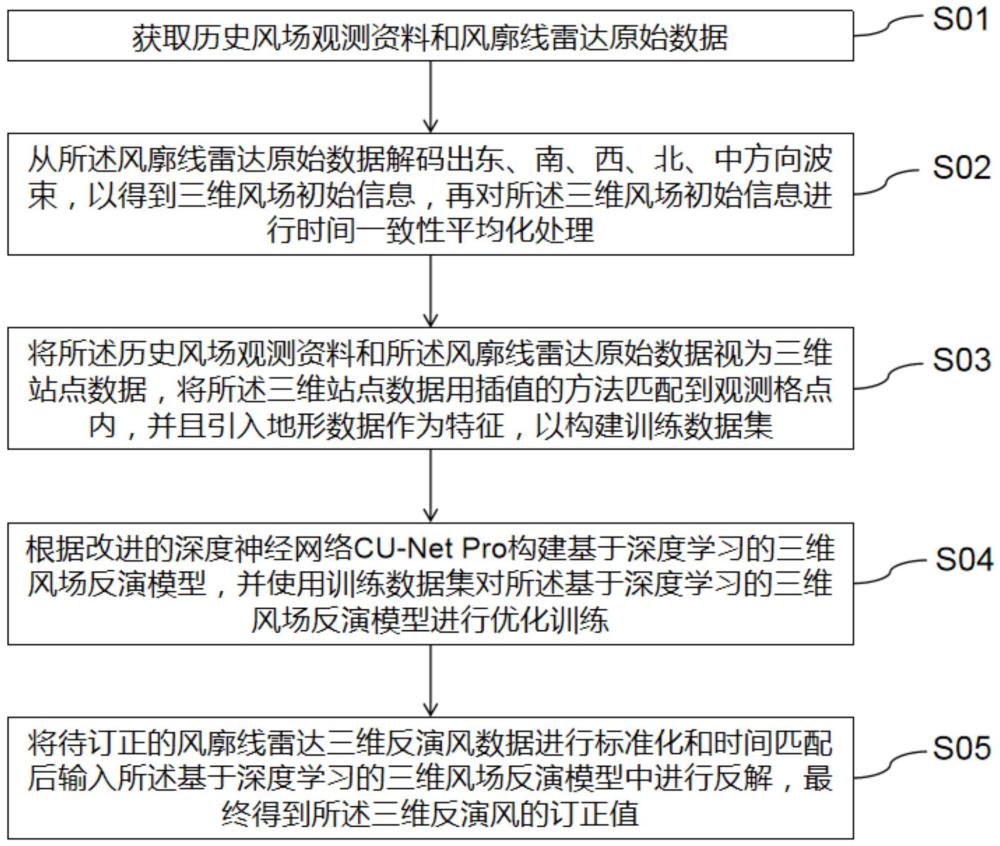
3、获取历史风场观测资料和风廓线雷达原始数据;
4、从所述风廓线雷达原始数据解码出东、南、西、北、中方向波束,以得到三维风场初始信息,再对所述三维风场初始信息进行时间一致性平均化处理;
5、将所述历史风场观测资料和所述风廓线雷达原始数据视为三维站点数据,将所述三维站点数据用插值的方法匹配到观测格点内,并且引入地形数据作为特征,以构建训练数据集;
6、根据改进的深度神经网络cu-net pro构建基于深度学习的三维风场反演模型,并使用训练数据集对所述基于深度学习的三维风场反演模型进行优化训练;
7、将待订正的风廓线雷达三维反演风数据进行标准化和时间匹配后输入所述基于深度学习的三维风场反演模型中进行反解,最终得到所述三维反演风的订正值。
8、与现有技术相比,本技术提供的一种深度学习风廓线雷达全波束的三维风场反演方法,本方法在对三维风场初始信息进行时间一致性平均化处理的过程、将所述历史风场观测资料和所述风廓线雷达原始数据进行匹配和标准化处理的过程以及将待订正的风廓线雷达三维反演风数据进行标准化和时间匹配的过程,需要先进行时间匹配和标准化转换等处理,大大减少了由于探测风的周期不同等造成的逐小时风变化误差;再通过引入地形数据作为特征并对应至观测格点,考虑了复杂地形对风场的影响;还根据改进的深度神经网络cu-net pro构建的基于深度学习的三维风场反演模型计算三维反演风的订正值,通过该模型不但可以学习到风场的深浅层特征,还可以充分挖掘时间和空间维度的风场变化规律。由此,本技术提出的方法能够解决现有的三维风场反演方法没有考虑风的逐小时变化误差和复杂地形对风场的影响,同时在训练模型上,现有的深度学习的神经网络收集深浅层特征的能力不足,使得计算出的三维风场的订正值不够准确,影响探测的三维风场质量的问题。
9、在本技术第一方面的一种可选实施方式,从所述风廓线雷达原始数据解码出东、南、西、北、中方向波束,以得到三维风场初始信息的步骤包括:
10、从所述风廓线雷达原始数据中解码出东、南、西、北、中方向波束,将东、南、西、北定义为倾斜波束,将中方向波束定义为垂直波束,由所述垂直波束和任意两个相邻的倾斜波束合成水平风,由此得到三维风场初始信息,其中合成水平风的超定方程组包括:
11、usinθ+wcosθ=ve,
12、vsinθ+wcosθ=vn,
13、-usinθ+wcosθ=vw,
14、-vsinθ+wcosθ=vs,
15、其中,u表示纬向风,v表示经向风,θ为倾斜波束的天顶角,θ=π/2-α,α表示仰角,ve、vw、vs、vn和w分别表示东、西、南、北和中方向的径向速度。
16、作为第一方面的一种可选实施方式,用最小二乘法对所述超定方程组进行求解的公式为:
17、,
18、其中,a表示的矩阵,x表示m维已知向量,b表示n维解向量,表示a的逆矩阵。
19、作为第一方面的一种可选实施方式,对所述三维风场初始信息进行时间一致性平均化处理的步骤包括:
20、根据时间一致性平均公式将三维风场初始信息进行时间均匀性检验,所述时间一致性平均公式为:
21、,
22、其中,表示对最大样本数组中所有的径向速度求得的平均值,表示经过一致性检验能够获取的最大样本,表示第j个样本值;
23、再将经时间一致性平均后的三维风初始信息调整为在预设探测周期下的三维风初始信息。
24、作为第一方面的一种可选实施方式,将所述历史风场观测资料和所述风廓线雷达原始数据视为三维站点数据,将所述三维站点数据用插值的方法匹配到观测格点内的步骤包括:
25、以风廓线雷达站所在位置为中心点,划定预设区域范围作为选取数据订正的范围,在所述预设区域范围内划分预设尺寸的观测格点;
26、根据最近邻插值方法将所述预设区域范围内的自动气象站插值到所述观测格点上,设定反演风输出的三维站点风速订正数据坐标为(0,0),自动气象站插值后的位置记为(x,y),再以所述三维站点为中心向北、向西、向南、向东选取预设格点数量;
27、利用公式分别对所述历史风场观测资料和所述风廓线雷达原始数据进行标准化处理,使其在-1至1之间变化,其中表示i站点处k时刻的反演风数据或观测风数据的原始值,表示i站点处k时刻的反演风数据或观测风数据的标准化值,表示i站点处k时刻的风数据的最大值,表示i站点处k时刻的风数据的最小值。
28、作为第一方面的一种可选实施方式,所述引入地形数据作为特征的步骤包括:
29、将前一天同一时刻的订正时刻观测的地形数据误差作为第一特征h1,将当前时刻的订正时刻所对应的观测的地形数据误差作为第二特征h2,根据算法标签将所述第一特征h1和所述第二特征h2对应至所述观测格点内。
30、作为第一方面的一种可选实施方式,所述改进的深度神经网络cu-net pro由多个不同深度的cu-net子网络融合而成,以使深度神经网络学习到三维风场的非线性特征,并且在所述改进的深度神经网络cu-net pro中引入了跳跃连接,以使深度神经网络学习到三维风场的深浅层特征。
31、作为第一方面的一种可选实施方式,将待订正的风廓线雷达三维反演风数据进行标准化和时间匹配后输入所述基于深度学习的三维风场反演模型中进行反解,最终得到所述三维反演风的订正值的步骤包括:
32、利用公式反解得到待订正的三维反演风的原始值,再根据待订正的三维反演风的标准化值和原始值得到所述三维反演风的订正值,表示i站点处k时刻的风数据的最大值,表示i站点处k时刻的风数据的最小值。
33、在本技术的第二方面提供了一种深度学习风廓线雷达全波束的三维风场反演系统,该包括:
34、资料数据获取模块,用于获取历史风场观测资料和风廓线雷达原始数据;
35、雷达数据解码模块,用于从所述风廓线雷达原始数据解码出东、南、西、北、中方向波束,以得到三维风场初始信息,再对所述三维风场初始信息进行时间一致性平均化处理;
36、训练数据集构建模块,用于将所述历史风场观测资料和所述风廓线雷达原始数据视为三维站点数据,将所述三维站点数据用插值的方法匹配到观测格点内,并且引入地形数据作为特征,以构建训练数据集;
37、模型优化训练模块,用于根据改进的深度神经网络cu-net pro构建基于深度学习的三维风场反演模型,并使用训练数据集对所述基于深度学习的三维风场反演模型进行优化训练;
38、风场信息反演模块,用于将待订正的风廓线雷达三维反演风数据进行标准化和时间匹配后输入所述基于深度学习的三维风场反演模型中进行反解,最终得到所述三维反演风的订正值。
39、在本技术的第三方面提供了一种计算机设备,所述计算机设备包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的处理程序,所述处理程序被所述处理器执行时实现上述一种深度学习风廓线雷达全波束的三维风场反演方法。
40、本技术的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实施例了解到。
- 还没有人留言评论。精彩留言会获得点赞!