一种用于岩层横向与纵向位移测量方法及系统
本发明涉及岩层横向与纵向位移测量,具体涉及一种用于岩层横向与纵向位移测量方法及系统。
背景技术:
1、在煤矿巷道的顶板岩层,横向和纵向位移的产生常受到多种因素的综合影响,这反映了岩层稳定性的复杂性和多样性。地质构造是其中至关重要的因素之一。地质构造的复杂变化可能导致岩层内部应力分布的不均匀性,从而为位移的发生创造了条件。这种不均匀性可能在特定地质构造单元内或相邻地质体之间产生不同程度的应力集中和释放,引发岩层位移现象。采矿活动也是影响岩层位移的重要因素之一。在地下开挖和支护操作过程中,岩层受到了机械力学和工程活动的直接影响,从而可能引发岩层的位移。采矿活动所造成的地表和地下工程变形不仅仅影响了岩层的稳定性,还可能通过岩层之间的相互作用传递应力,进而导致巷道顶板岩层的横向和纵向位移。地下水位的变化也是岩层位移的重要影响因素之一。地下水对岩层的孔隙水压力和地下水位的变化可能会影响岩层的稳定性。尤其是在季节性或长期性的地下水位变化情况下,地下水对岩层的渗透和承载能力可能会产生显著影响,加剧了岩层的变形和位移。
2、洞室作为矿山内的空间结构,其岩层位移情况同样具有复杂性和多变性。与矿巷相比,洞室的形态和大小更加多样化,因此岩层位移可能受到更多复杂因素的影响。除了地质构造和采矿活动外,洞室周围的岩层还可能受到岩体结构、地质裂缝和断层等因素的影响,这些因素进一步增加了洞室岩层的位移风险。
3、边坡位移情况在露天开采煤矿中备受关注,这与地质构造、降雨侵蚀和人为开采等因素密切相关。边坡岩层的横向和纵向位移可能导致边坡的不稳定和塌方,对矿山生产和周边环境造成严重影响。因此,对于这些因素的综合影响对煤矿巷道顶板岩层、洞室和边坡的位移情况进行准确评估和监测,以确保矿山的安全生产和环境保护至关重要。
4、然而,现有测量方法难以满足对精度、可靠性、实时性和安全性的高要求。因此,开发一种能够准确、快速、安全地测量煤矿顶板岩层横向位移的方法和系统,对于提高煤矿生产的安全性和效率具有重要意义。
5、在所述背景技术部分公开的上述信息仅用于加强对本公开的背景的理解,因此它可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本发明的目的是提供一种用于岩层横向与纵向位移测量方法及系统,通过杆中的倾角传感器和伸缩传感器,反映监测设备在岩层中的倾角和长度变化,可以有效计算出岩层在纵向与横向的运动位移,使用倾角传感器来测量重力加速度在不同轴向上的数据,以反映物体在x、y和z轴上的角度,结合杆件长度及岩层中伸缩长度,通过将公式转换成大地坐标系下的角度并计算各杆件中节点初始空间坐标,以监测设备的节点1为监测设备坐标原点构建大地坐标系,通过矢量累加获得各节点相对节点1处的坐标,再通过运动前后坐标点即可计算各节点相对初始状态的位移,通过前后获取的累加后节点n处的坐标值,能够准确计算该节点发生的位移情况及位移空间方向,通过比较不同时间点的坐标值,可以确定节点的位移量和位移方向,从而深入了解该处结构的变化和演化过程,以解决上述背景技术中的问题。
2、为了实现上述目的,本发明提供如下技术方案:一种用于岩层横向与纵向位移测量方法,包括以下步骤:
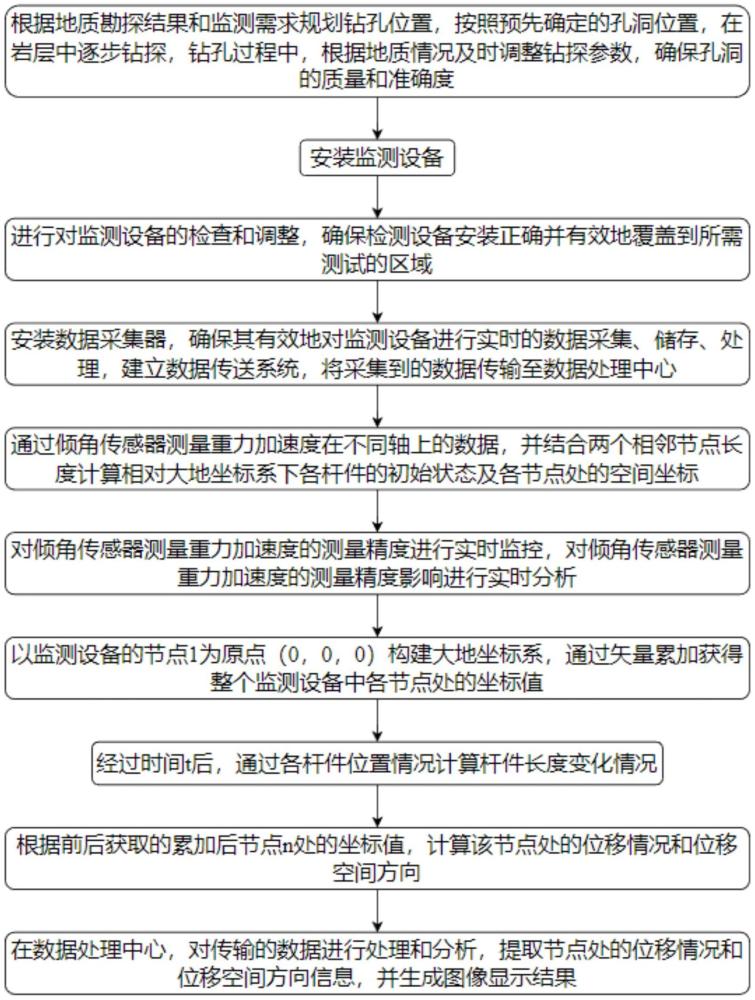
3、根据地质勘探结果和监测需求规划钻孔位置,按照预先确定的孔洞位置,在岩层中逐步钻探,钻孔过程中,根据地质情况及时调整钻探参数,确保孔洞的质量和准确度;
4、安装监测设备;
5、进行对监测设备的检查和调整,确保检测设备安装正确并有效地覆盖到所需测试的区域;
6、安装数据采集器,确保其有效地对监测设备进行实时的数据采集、储存、处理,建立数据传送系统,将采集到的数据传输至数据处理中心;
7、通过倾角传感器测量重力加速度在不同轴上的数据,并结合两个相邻节点长度计算相对大地坐标系下各杆件的初始状态及各节点处的空间坐标;
8、对倾角传感器测量重力加速度的测量精度进行实时监控,对倾角传感器测量重力加速度的测量精度影响进行实时分析;
9、以监测设备的节点1为原点(0,0,0)构建大地坐标系,通过矢量累加获得整个监测设备中各节点处的坐标值;
10、经过时间t后,通过各杆件位置情况计算杆件长度变化情况;
11、根据前后获取的累加后节点n处的坐标值,计算该节点处的位移情况和位移空间方向;
12、在数据处理中心,对传输的数据进行处理和分析,提取节点处的位移情况和位移空间方向信息,并生成图像显示结果。
13、优选的,安装监测设备的具体步骤如下:
14、操作人员将准备好的阵列式监测设备带至现场,并准备好所需的测试杆和配件,其中倾角传感器及伸缩传感器使用rs485通讯线缆连接;
15、逐一将测试杆放入预制的孔洞中,确保监测设备准确覆盖到需要测试的区域;
16、通过特定卡扣将测试杆固定在指定位置,并根据布局图纸将测试杆按照特定排列方式安装到孔洞中。
17、优选的,设定时间间隔g,基于时间间隔g记录各杆件因岩层运动与x轴、y轴、z轴产生的倾斜角度,并将倾斜角度分别记为α、β、γ,以每根杆上端节点为原点,通过下式转换成大地坐标系下的角度进行计算各杆件中杆末端节点大地坐标,因此节点n相对节点n-1的坐标系中表示为(lnx,lny,lnz),其中,rzyx=rz(γ)*ry(β)*rx(α),rzyx表示旋转矩阵,用于计算坐标的变换,rx(α),ry(β),rz(γ):分别是绕x轴旋转α角度,绕y轴旋转β角度以及绕z轴旋转γ角度的旋转矩阵,每个旋转矩阵都与一个特定的轴和角度相对应。
18、优选的,在监测系统中,(lnx,lny,lnz)表示的是从一个监测节点n-1到另一个节点n的三维空间位移,这些值是基于倾角传感器测量的结果,用来计算节点n相对于节点n-1的空间位置,lnx=l*cos(β)*cos(α),lny=l*cos(β)*sin(α),lnz=l*sin(β);
19、结合上述公式得出:l表示两个相邻节点长度,lnx表示某杆件在x轴上的投影值,lny表示某杆件在y轴上的投影值,lnz表示某杆件在z轴上的投影值。
20、优选的,为了对倾角传感器测量重力加速度的测量精度进行实时监控,获取倾角传感器测量重力加速度的噪声水平指数、漂移指数、分辨率指数,将噪声水平指数、漂移指数、分辨率指数进行综合分析,生成影响指数,通过影响指数对倾角传感器测量重力加速度的测量精度影响进行实时分析。
21、优选的,噪声水平指数的计算公式为:其中,s(t)为在时间t的传感器读数,为这段时间内读数的平均值,t是总时间,nli为噪声水平指数;
22、漂移指数的计算公式为:其中,s(m)和s(0)分别是在时间m和开始时的传感器读数,漂移指数测量的是开始和结束时间的读数差,di表示漂移指数,m表示时间点的总数;
23、分辨率指数的计算公式为:δs是能被传感器检测到的最小信号变化量,δt'是时间间隔,ri为分辨率指数。
24、优选的,通过对倾角传感器测量重力加速度时生成的噪声水平指数、漂移指数、分辨率指数进行综合分析,生成测影响指数θθτ,用于评估传感器的整体性能,影响指数生成的计算公式为:
25、
26、,式中,x1、x2、x3分别为噪声水平指数nli、漂移指数di以及分辨率指数ri的预设比例系数,且x1、x2、x3均大于0。
27、优选的,将倾角传感器测量重力加速度时生成的测影响指数与预先设定的测影响指数参考阈值进行比对分析,若测影响指数大于等于测影响指数参考阈值,则生成测量精度影响信号,并对该信号发出异常提示,通知相关工作人员知晓,若若测影响指数小于测影响指数参考阈值,则生成测量精度精确信号,不对该信号发出异常提示,此时表明倾角传感器可对重力加速度精确测量。
28、优选的,将节点用n进行表示,节点n相对节点1的坐标系中表示为:(l2x+l3x+…+lnx,l2y+l3y+…+lny,l2z+l3z+…+lnz),经过时间t后,此时两个相邻节点长度为l',l'=l+δl,其中δl为伸缩传感器在岩层作用下伸长或缩短量;
29、计算部分参照步骤五、步骤六,变换后节点n处的坐标表示为(l'2x+l3'x+…+l'nx,l'2y+l3'y+…+l'ny,l'2z+l3'z+…+l'nz),通过比较前后两个时间点的坐标值变化,确定节点在空间中的位移量和位移方向。
30、一种用于岩层横向与纵向位移测量系统,包括钻孔与参数调整模块、设备检查与调整模块、数据采集与传输模块、空间坐标计算模块、测量精度监控模块、坐标系统建立模块、杆件长度变化计算模块、位移分析模块以及数据处理与显示模块;
31、钻孔与参数调整模块,根据地质勘探结果和监测需求规划钻孔位置,按照预先确定的孔洞位置,在岩层中逐步钻探,钻孔过程中,根据地质情况及时调整钻探参数,确保孔洞的质量和准确度;
32、设备检查与调整模块,进行对监测设备的检查和调整,确保检测设备安装正确并有效地覆盖到所需测试的区域;
33、数据采集与传输模块,安装数据采集器,确保其有效地对监测设备进行实时的数据采集、储存、处理,建立数据传送系统,将采集到的数据传输至数据处理中心;
34、空间坐标计算模块,通过倾角传感器测量重力加速度在不同轴上的数据,并结合两个相邻节点长度计算相对大地坐标系下各杆件的初始状态及各节点处的空间坐标;
35、测量精度监控模块,对倾角传感器测量重力加速度的测量精度进行实时监控,对倾角传感器测量重力加速度的测量精度影响进行实时分析;
36、坐标系统建立模块,以监测设备的节点1为原点(0,0,0)构建大地坐标系,通过矢量累加获得整个监测设备中各节点处的坐标值;
37、杆件长度变化计算模块,经过时间t后,通过各杆件位置情况计算杆件长度变化情况;
38、位移分析模块,根据前后获取的累加后节点n处的坐标值,计算该节点处的位移情况和位移空间方向;
39、数据处理与显示模块,在数据处理中心,对传输的数据进行处理和分析,提取节点处的位移情况和位移空间方向信息,并生成图像显示结果。
40、在上述技术方案中,本发明提供的技术效果和优点:
41、本发明通过杆中的倾角传感器和伸缩传感器,反映监测设备在岩层中的倾角和长度变化,可以有效计算出岩层在纵向与横向的运动位移,使用倾角传感器来测量重力加速度在不同轴向上的数据,以反映物体在x、y和z轴上的角度,结合杆件长度及岩层中伸缩长度,通过将公式转换成大地坐标系下的角度并计算各杆件中节点初始空间坐标,以监测设备的节点1为监测设备坐标原点构建大地坐标系,通过矢量累加获得各节点相对节点1处的坐标,再通过运动前后坐标点即可计算各节点相对初始状态的位移,通过前后获取的累加后节点n处的坐标值,能够准确计算该节点发生的位移情况及位移空间方向,通过比较不同时间点的坐标值,可以确定节点的位移量和位移方向,从而深入了解该处结构的变化和演化过程。
42、本发明适用于多种监测情况,包括顶板岩层、洞室和边坡,对于顶板岩层监测,本发明可用于实时监测岩层的位移情况,预警可能的岩石坍塌或顶板失稳的风险,在洞室监测方面,该发明可帮助监测洞室内部岩体的变形和位移,及时发现洞室支护结构的损坏或变形,保障洞室的稳定运行,同时,针对边坡监测。
43、本发明能够对边坡进行实时监测,及时发现并预警边坡的位移和滑坡风险,为防灾减灾提供了重要的数据支持,该监测设备适用于各种安装角度,包括横向、倾斜和纵向等各种安装条件,并且在这些情况下都能正常运行。
44、本发明通过实时监控和分析倾角传感器的测量影响指数,并与预设阈值进行比较,可以有效地提高监测系统的可靠性和精确性,这种方法使得任何超出阈值的情况能够迅速被检测并通过异常提示通知相关工作人员,从而可以及时进行设备调整或维修,避免因设备精度下降而引起的数据误差和可能的安全风险,此外,当测量指数在阈值之下时,确认系统的准确性,保证了监测数据的质量和岩层移动分析的准确性,提高了整体作业的效率和安全性。
- 还没有人留言评论。精彩留言会获得点赞!