具有力控制机构的机械机芯手表的制作方法
1.本发明涉及一种具有力控制机构(例如当佩戴手表时由于重力产生的力)的跳秒类型的机械机芯手表。优选地,所述力控制机构可以是围绕擒纵机构安装的陀飞轮机构。陀飞轮的笼架/框架容纳擒纵机构,优选地,笼架每分钟执行一次完整的旋转,特别是执行60个一秒跳跃。
背景技术:
2.需要指出的是,在钟表制造业中,陀飞轮(也称为“旋转笼架”)是钟表的一个复杂机构,它被添加到擒纵机构中,旨在通过抵消地球引力对谐振器等时性的干扰来提高机械手表的精度。区分陀飞轮的基本标准,尤其是关于卡罗素的基本标准,是陀飞轮的笼架啮合在其上的固定轮系的存在。通常,陀飞轮的笼架安装成在两个附接点之间旋转。
3.为了补偿对谐振器等时性的任何干扰,还考虑了重力。擒纵机构耦接到谐振器。在每个振荡周期,擒纵机构都会与谐振器相互作用一次或两次。谐振器在相互作用过程中行进的角度称为升角。谐振器的其余行程称为补充角或补充弧。
4.在补充弧期间,谐振器可以与擒纵机构接触(摩擦休止擒纵机构),也可以不接触(自由擒纵机构)。在升角期间,擒纵机构执行两个主要阶段,即解锁(或计数)阶段和冲击(或维持振荡)阶段。
5.在一种钟表复杂机构中,跳秒机构的目的是以一整秒的步级来显示秒,这在60秒刻度盘上对应于每秒6
°
的角度。这种跳秒机构通常与恒力机构相关联,该恒力机构利用了跳秒的独特设计特征。独立秒或固定秒机构也类似于这些设计,其具有能够像计时码表一样随意停止秒的独特特征。
6.钟表文献和专利中存在多种跳秒机构,并已应用。在一些例子中,在jacquet droz手表中,具有blancpain 1195机芯。对于breguet的marie antoinette手表,具有独立秒机构。
7.wo专利申请no.2011/157797 a1公开了一种以周期性跳跃使枢转式笼架前进的机构,该枢转式笼架承载擒纵轮和小齿轮以及与所述擒纵轮和摆轮/游丝机构配合的擒纵叉。此外,它包括保持装置,以根据所述保持装置运动与否来允许或阻止所述笼架枢转。还存在止动机构,以根据所述止动机构的角位置来允许或阻止所述保持装置的枢转。恒力装置周期性地使保持装置配合。该恒力装置包括摆动件,其设置为执行完整的回转。
8.所描述的这些机构的原理是通过一个机构来保持在擒纵机构和秒轮之间的运转轮系,而附加的弹簧在停止阶段以恒定的力保持擒纵机构。在由擒纵机构计数的一秒结束时,被释放的轮系使得可以前进一秒。因此,显示器前进,并且机构在跳跃阶段被重置。
9.在这种以接近一秒的频率运行的机构中,钟表中可用的扭矩非常低。这就是为何这些机构难以生产的原因,而且一般不太可靠。
10.在blancpain 1195机芯的机构中,存在止动系统,其在停止阶段的锁定中分配一部分扭矩来补偿摩擦。这给出了对于80%的跳跃在停止阶段具有大约20%的角位移的跳
秒。
11.也可以设想降低频率并执行独立分钟而非独立秒,这有利于构造。
12.这些机构中的一些可能在完全的弹簧松弛/能量耗散后失去同步,并移动到锁定位置。这需要与动力储备机构相关联的止动系统,它将在完全的弹簧松弛/能量耗散之前停止该机构。
13.在欧洲专利no.1528443b1描述的机构中,提出了一种用于具有独立秒的手表的恒力装置。这种装置使得在由储能弹簧驱动的杆上移动轮组的心轴成为可能,该储能弹簧倾向于使杆枢转。该装置包括机芯的第一秒轮的小齿轮,该小齿轮与安装成在该杆上枢转的中介轮啮合,并且与限定该轮组的第二秒轮的小齿轮啮合。承载指状件的所述杆必须适于与止动轮的棘轮齿圈配合,该止动轮与第一秒轮啮合。当指状件与棘轮的径向侧面啮合时,特别是包括第一秒轮和中介轮的轮系被锁定,而不传递来自第一秒轮和中介轮的力。第二秒轮由擒纵机构控制,并且只有在擒纵机构被摆轮移动时才会旋转。通过所述杆在相反方向上的移动来对弹簧上条,由此,当止动轮被释放时,弹簧施加在所述杆上的扭矩小于发条盒发条施加在所述杆上的扭矩。因此,该装置使得可以根据止动轮的齿数来调整上条/松弛周期。这种装置可以确保跳秒功能,但主要缺陷是不容易生产出执行此操作所需的大量组成部件。此外,在跳秒的时刻存在轮组的运动,这是不希望的。
14.中国实用新型209014916u公开了一种具有齿轮的陀飞轮机构。齿轮包括用于心轴通过的中心部分,该心轴通过弹簧状金属线圈连接到具有外周齿的冠轮的内壁。
15.欧洲专利no.3356690b1公开了一种钟表部件,该钟表部件具有公知类型的柔性枢轴,该柔性枢轴具有单独的交叉条带,并且该钟表部件具有用于调节条带的交叉点位置的装置。
技术实现要素:
16.本发明寻求以更简单的方式通过恒定力实现跳秒显示,而不必移动轮组,并且没有在上条循环结束时失去同步的风险,从而对于特别是在陀飞轮机芯中的应用来限制摩擦。
17.因此,本发明的一个目的是通过提供一种具有力补偿或控制机构的跳秒类型的机械机芯手表来克服现有技术的缺陷,该机械机芯手表克服了上述现有技术装置的缺陷。
18.为此,本发明涉及一种具有力补偿或控制机构的跳秒类型的机械机芯手表,其包括独立权利要求1中限定的特征。
19.在从属权利要求2至18中还描述了具有力补偿或控制机构的跳秒类型的机械机芯手表的特定实施例。
20.根据本发明的具有力补偿或控制机构的机械机芯手表的一个优点在于,它包括用于累积能量的秒轮,该能量对于通过振荡器保持擒纵机构的多次振荡是必要的,特别是在切换到跳跃模式之前的停止模式中。根据配备于传统擒纵机构的谐振器的频率,在来自发条盒的一部分轮系不被驱动的情况下,所述秒轮维持谐振器或振荡器的几次振荡。优选地,所述秒轮在一定数量的振荡之后释放锁定元件,诸如摆动件(flirt),以便沿顺时针方向(sam)移动陀飞轮的笼架6
°
,并且来自发条盒的运转轮系限定跳秒类型的秒轮。在根据一个示例性实施例的陀飞轮的情况下,在2.5hz的振荡器的至少第五次冲击时,摆动件被释放,
籍此,连接到摆动件的中介轮(intermediate wheel)、中间轮(medium wheel)、中间大轮和发条盒在与秒轮的累积相反的方向上驱动陀飞轮的笼架行进6
°
的步级。首要地,陀飞轮的笼架可以在限定一秒钟的一定数量振荡之后被角向移动。通过这种避免移动轮组的布置,不会影响在上条结束时失去同步的风险。
21.有利的是,在连接到瑞士杠杆型擒纵机构的振荡器的游丝的一些振荡之后,秒轮旨在于停止阶段移动一定数量的小步级。在此停止阶段或停止模式中,秒轮沿逆时针方向旋转,同时被预上条的具有弹性条带的整体式铰接结构或柔性轴承(flexure bearing)驱动旋转。此柔性轴承的可移动部分被紧固到秒轮的一个表面,而此柔性轴承的固定部分被紧固到钟表机芯的支撑件,例如机板。此柔性轴承的可移动部分优选直接紧固在秒轮下方。柔性轴承穿过轴向开口与秒轮小齿轮同轴安装,该秒轮小齿轮是秒轮和陀飞轮的小齿轮。
22.有利的是,具有弹性条带(带簧)的柔性轴承包括连接更坚硬部分的串联的若干弹性条带,包括柔性轴承的可移动部分和固定部分,以及可能的其他中间部分。因此,具有串联弹性条带的柔性轴承可以制成为具有更坚固的结构,该结构能够通过返回扭矩确保秒轮的旋转,以有利地用来代替力控制机构的弹簧,并且具有更好的轴向保持。此外,这种具有弹性条带的柔性轴承除了没有游隙之外,还确保没有摩擦、磨损和能量耗散,并确保精确引导。
附图说明
23.在下面特别是参照附图的描述中,具有力补偿或控制机构的机械机芯手表的目的、优点和特征将更加清楚地呈现,其中:
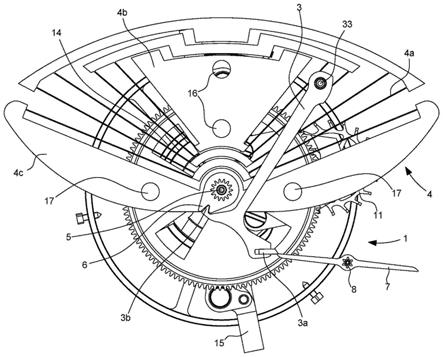
24.图1示出了根据本发明的具有力控制机构的跳秒型手表机芯的主要元件的仰视三维视图。
25.图2示出了根据本发明的具有力控制机构的跳秒型机械手表机芯的仰视图,但是没有中间轮和中介轮。
26.图3a、3b和3c示出了根据本发明的用于连接到秒轮的具有弹性条带的柔性轴承或具有柔性条带的枢轴的三个实施例的平面图,其具有更高的扭矩和更好的轴向保持。
27.图4示出了传统机械手表机芯的另一示意性实施例的仰视图,其具有不带陀飞轮的运转轮系,以及根据本发明的力控制机构。
28.图5示出了在陀飞轮中心处的所述机构从底部到顶部的截面图,如以上图1中部分所示。
具体实施方式
29.在下面的描述中,将仅简要描述具有力控制机构的跳秒类型的机械手表机芯的那些在本技术领域中众所周知的各种构件或元件。
30.首先,应该指出的是,具有力控制机构的跳秒类型的机械机芯手表可以如下文所述具有陀飞轮,该陀飞轮的笼架容纳振荡器和擒纵机构,或者如同传统机械机芯那样没有陀飞轮,这将在后面参考图4进行解释。
31.图1和图2示出了机械手表机芯1的一部分,其示出为没有能量源,例如发条盒,该发条盒作为主发条并且在这种情形下连接到(均力)圆锥轮(fusee),该圆锥轮通过链条连
接到条盒轮以对其驱动。也没有示出中间大轮(medium large wheel),根据一个常规实施例,该中间大轮被圆锥轮的外周齿圈驱动旋转。此能量作为扭矩施加在中间轮10的小齿轮上。
32.因此,图1和图2示出了机械手表机芯的一部分,其包括运转轮系5、8、9、10,在其中设置有机械手表机芯1的力控制机构。该力控制机构可以类似于恒力装置。运转轮系布置在未示出的能量源和擒纵机构之间,该能量源优选为发条盒和主发条,该擒纵机构例如为瑞士杠杆式擒纵机构13,其具有轮形式的擒纵轮组11,擒纵轮组11由振荡器14交替地保持和释放,振荡器14优选为摆轮/游丝机构,其从所述擒纵轮组11接收能量以维持其振荡。擒纵轮组11被布置成能够在振荡器14的每个半振荡/半周期时以相同的旋转方向旋转。
33.擒纵轮组11与秒轮2啮合,秒轮2在下文中还被称为固定秒轮sfa。此秒轮2被称为固定秒轮sfa,即使它在运行中不是静止的。此固定秒轮sfa 2可以在停止模式下沿逆时针方向(siam)旋转以便保持关联到振荡器的擒纵机构的运行,以及在跳跃模式下沿顺时针方向(sam)旋转以便执行对应于1秒的跳跃。在具有陀飞轮的实施例和在没有陀飞轮的实施例两者中,都总是存在停止阶段和跳跃阶段,以便在显示器上实现对应于一秒钟的跳跃。
34.为此,固定秒轮sfa2优选地包括与和所述擒纵轮组11同轴的擒纵小齿轮12啮合的外周齿圈。如下文所述,在运转轮系的停止阶段中,固定秒轮sfa2借助于柔性轴承4的复位力沿逆时针方向(siam)旋转,并在振荡器14的每个半振荡时经由擒纵小齿轮12驱动擒纵轮组11,以便在该停止阶段期间维持振荡器和擒纵机构的运行。
35.在此停止阶段期间,固定秒轮sfa2围绕陀飞轮的笼架15在其柔性轴承4上逆时针(siam)枢转,而不接触该笼架15,并且该笼架15被停止。sfa2的这种siam枢转继续执行到运转轮系5、8、9、10被释放的时刻,由此通过陀飞轮笼架15及其秒轮小齿轮5执行一秒跳跃,伴随着在跳跃阶段沿顺时针方向(sam)驱动与擒纵轮组11连接的固定秒轮sfa2。
36.为了限定停止阶段和跳跃阶段,所述力控制机构一方面包括优选旋转式的锁定元件7,该锁定元件7被布置成在停止模式下与和固定秒轮sfa2相连接的止动构件3协作。如图1和2所示,该止动构件3可以是支架(rack,类似于擒纵叉)3,支架3在其第一端处围绕心轴33可旋转地安装,心轴33例如设置在机芯组件机板和中间轮桥夹板(未示出)之间。支架3的第二自由端包括在一个锁定部中的指形的边缘部分3b,其自由地布置在凸轮6的两个齿之间的导向腔部内。凸轮6靠近所述固定秒轮sfa2的中心固定地安装到所述固定秒轮sfa2上,以便驱动支架3在每个方向上旋转。支架3的第二自由端还包括止动件3a,例如擒纵钻(pallet-stone,类似于擒纵叉瓦)3a,其布置在边缘部分3b的相对侧,并且布置成在停止模式下阻挡旋转式锁定元件7。擒纵钻3a可以由减少与锁定元件7的摩擦的硬质材料制成,锁定元件7在停止阶段与擒纵钻3a接触。此止动件(其为擒纵钻3a)可以由减少摩擦的材料制成,例如红宝石。
37.为了特别是在停止模式下驱动固定秒轮sfa2旋转,预上条的具有弹性条带4a或带簧的柔性轴承4直接连接到固定秒轮sfa 2。柔性轴承4像弹簧一样作用在固定秒轮sfa 2上。为此,柔性轴承4包括可移动部分4c,该可移动部分4c具有至少一个开口17,但优选两个开口17,用于附接到固定秒轮sfa 2的一个面。优选地,柔性轴承4紧固到固定秒轮sfa 2的下表面。
38.应当指出,弹性条带4a是被限定的,这些条带可以具有矩形、六边形或圆形的横截
面。这些弹性条带具有一定几何形状:长度和横截面必须被清楚确定为确保弹簧功能,以便以需要的扭矩驱动固定秒轮sfa 2旋转。可以参考下面提到的w.h.wittrick的著作来制造具有弹性条带4a的柔性轴承4。
39.如图5所示,因此提供在开口17中或穿过开口17的至少一个附接装置27,以用于将固定秒轮sfa 2附接到柔性轴承4的可移动部分4c。优选地,该附接装置27可以是固定秒轮sfa2的至少一个材料延伸部分,以与所述轮形成单一部件。两个材料延伸部分27可以设置成例如通过力被分别插入柔性轴承4的可移动部分4c的两个开口17中,以确保良好的保持力,并且不会从每个开口17突出。还可以提供围绕每个材料延伸部分27的边缘,该边缘可以直接紧固到相应的材料延伸部分,以在固定秒轮sfa 2的下表面和柔性轴承4的上表面之间提供空间。
40.柔性轴承4还包括固定部分4b,该固定部分4b具有至少一个开口16,但优选两个开口16,以通过螺钉和螺母组件(未示出)安装和固定在手表机芯支撑件上,例如机板上。除了可能在可移动部分4c和固定部分4b之间的中间部分之外,若干弹性条带4a或弹性条带部分也将可移动部分4c连接到固定部分4b。柔性轴承4穿过轴向开口安装,与秒轮小齿轮5同轴,并围绕与秒轮小齿轮5的轴线同轴的固定秒轮sfa 2的轴向管。
41.还应当指出,可以设想在固定秒轮sfa2中设置两个附接开口,用于通过强制插入以与上述类似但相反的方式接纳柔性轴承4的可移动部分4c的两个材料延伸部分。附接装置也可以是穿过可移动部分和固定秒轮sfa2中的开口的螺钉和螺母组件,但是使用这种类型的组件会浪费太多空间。类似地,以秒轮sfa2附接到柔性轴承4作为例子,柔性轴承4的固定部分4b可以通过除了螺钉和螺母组件之外的其他方式附接到机板上。在休止位置,即从跳跃模式切换到停止模式之后,柔性轴承4的弹性条带4a必须被预加应力以累积机械能,以便旋转固定秒轮sfa2,特别是在逆时针方向(siam)上。
42.固定秒轮sfa2的旋转还经由与瑞士杠杆式擒纵机构13的擒纵轮组同轴的擒纵小齿轮12驱动擒纵轮组11。这样,通过具有弹性条带4a的柔性轴承4中累积的机械能作用在固定秒轮sfa2上以沿逆时针方向(siam)旋转固定秒轮sfa2,对于在此停止阶段通过振荡器14维持擒纵机构的操作是有利的。
43.支架3在没有弹簧作用的情况下连接到附接于固定秒轮sfa2的凸轮6,以根据所述固定秒轮sfa2的角位置,通过保持作为锁定元件的摆动件7来锁定或释放所述运转轮系。该摆动件7与支架3的锁定部的止动件3a接触。如上所述,该止动件是擒纵钻3a。
44.在所给出的情形中,固定秒轮sfa2能够在相反方向上旋转通过5个小的步级,其对应于代表1秒的6
°
角度。摆动件7本身由运转轮系驱动,并由止动件3a保持。一旦在停止阶段结束时被释放,支架3的旋转就释放摆动件7,这会启动跳跃阶段。在跳跃阶段期间,摆动件7执行对应于1秒跳跃的旋转,在所示的情况下,其被运转轮系驱动半圈。运转轮系还经由秒轮小齿轮5和固定秒轮sfa2沿顺时针方向(sam)驱动陀飞轮笼架15,这样再次对柔性轴承4上条。固定秒轮sfa2的柔性轴承4被设置成:当所述固定秒轮sfa2在跳跃阶段期间被顺时针sam驱动时累积能量,并且在停止阶段期间将所述能量返回给所述固定秒轮sfa2以使其逆时针siam旋转。
45.通常,在停止阶段,在运转轮系释放之前发生振荡器14的多个半振荡。这意味着振荡器14的频率通常高于1hz,例如在本例中,可以建立在2.5hz。由于固定秒轮sfa2在停止阶
段以对应于一个半振荡(半周期)的每个小的步级旋转,因此可以在停止阶段计数振荡器14的5个半振荡,直到旋转式锁定元件7被释放以用于跳跃阶段。因此,连接于固定秒轮sfa2的柔性轴承4必须在振荡器14的所述5个半振荡期间或笼架被停止的期间提供能量,并且必须在所述笼架15的跳跃期间被重新上条。
46.图2中所示的柔性轴承4包括固定部分4b,其设置在可移动部分4c中的具有宽的v形开口的腔部内,所述可移动部分4c包括与秒轮小齿轮5的轴线同轴的轴向开口。两个贯通开口16设置在固定部分4b中,并与所述轴向开口布置在同一条线上。两个贯通开口17设置在可移动部分4c中,并且实际上与所述轴向开口布置在同一条线上。
47.在此实施例中,五个连续的弹性条带4a将可移动部分4c的第一内侧连接到固定部分4b的第一内侧。来自可移动部分4c的第一弹性条带4a连接到第一中央中间部分。来自第一中央中间部分的第二弹性条带4a连接到第一外围中间部分。来自第一外围中间部分的第三弹性条带4a连接到第二中央中间部分。来自第二中央中间部分的第四弹性条带4a连接到第二外围中间部分。来自第二外围中间部分的第五弹性条带连接到固定部分4b的第一内侧。
48.五个连续的弹性条带4a将可移动部分4c的第二内侧连接到固定部分4b的第二内侧。来自可移动部分4c的第二弹性条带4a连接到相同的第一中央中间部分。来自所述相同的第一中央中间部分的第二弹性条带4a连接到相同的第一外围中间部分。来自第一外围中间部分的第三弹性条带4a连接到相同的第二中央中间部分。来自第二中央中间部分的第四弹性条带4a连接到相同的第二外围中间部分。来自第二外围中间部分的第五弹性条带连接到固定部分4b的第一内侧。
49.可以看出,固定部分4b布置在可移动部分4c和两个外围中间部分之间的内部。此外,两个中央中间部分形成以秒轮小齿轮5的轴线为中心的圆弧,并且类似地,两个外围中间部分也以秒轮小齿轮5的轴线为中心。
50.然而,根据振荡器14的振荡频率,可以在停止阶段提供振荡器14的更多或更少的半振荡。对于2.5hz的振荡器,每个半振荡必须等于0.2秒。因此,可以仅针对大于1hz的振荡器频率选择振荡器的半振荡次数n,例如对于1.5hz,至少n=3个半振荡,或者对于2.5hz,n=5。在停止阶段由固定秒轮sfa2执行的小步级的数量必须对应于在跳跃阶段的1秒跳跃。
51.还可以设想周期大于1秒的跳跃,这将上述规则扩展到高于显示器跳跃频率的振荡器频率。这样,可以设想每分钟跳跃一次。
52.参照图1和2所示的实施例,旋转式锁定元件7是形式为杆的摆动件,其在中心可旋转地安装。该摆动件与轴向锁定小齿轮8成一体,以便与运转轮系的中介轮9啮合。锁定支架3可旋转地安装在与锁定部相对的第一端处,该锁定部包括锁定擒纵钻3a。如上文所述,旋转式锁定支架3在第二端包括边缘部分3b,该边缘部分3b是指状件3b,该指状件3b在与固定秒轮sfa 2成一体的凸轮6中制成的腔部内被引导。此凸轮6由两个齿形成,在两个齿之间具有所述腔部,并且此凸轮6控制支架3的枢转,支架3包括设置在与指状件3b相对的一侧上的锁定擒纵钻3a。如上文所述,该擒纵钻3a可以由减少与锁定元件7的摩擦的硬质材料制成,所述锁定元件7在停止阶段与擒纵钻3a接触。
53.擒纵钻3a被布置成与所述锁定元件7(其是摆动件)以抵靠方式配合,以便在停止阶段锁定所述运转轮系,或者在跳跃阶段释放所述锁定元件7和所述运转轮系。摆动件7包
括关于其中心的第一锁定杆部分和第二锁定杆部分,所述中心包括轴向锁定小齿轮8。一旦在跳跃阶段擒纵钻3a不再与摆动件7的第一杆部分或摆动件7的第二杆部分接触,摆动件7就被设定为旋转并旋转180
°
,以允许运转轮系旋转,之后运转轮系在停止模式下处于新的锁定位置。在跳跃模式下,陀飞轮的笼架15被运转轮系驱动以顺时针(sam)旋转6
°
,以使时间增加一秒。固定秒轮sfa2由连接到同轴秒轮小齿轮5的笼架15驱动通过6
°
的角度,以对支架sfa的柔性轴承4重新上条。固定秒轮sfa2由笼架15驱动,因为擒纵机构也与笼架一起旋转。柔性轴承4的重新上条非常快速,这意味着一旦摆动件7已经旋转了180
°
,则摆动件7的端部就直接回到与止动擒纵钻3a接触。在再次发生锁定的时刻,新的停止阶段的操作开始。
54.应当理解,在新的停止阶段之前的摆动件7的180
°
旋转直接地且动态地与运动部件的惯性相关联。特别地,转动最快的摆动件7的惯性非常重要。因此,摆动件7的低惯性设计将是优选的,从而它可以用镍或磷镍合金通过liga制造手段来获得,或者用硅通过drie制造手段来获得。这些制造手段允许以对于限制摆动件7的惯性有利的精确几何形状来制造摆动件7。
55.在停止阶段期间,擒纵轮组11由固定秒轮sfa2沿第一旋转方向(siam)驱动,这对应于被维持的振荡器14的每个半振荡。由固定秒轮sfa2借助于擒纵小齿轮12驱动旋转的擒纵轮组11行进5个小的步级。这使得柔性轴承4松弛,柔性轴承4驱动固定秒轮sfa2,并在释放摆动件7的方向上移动所述擒纵钻3a。
56.由于除了固定秒轮sfa2之外运转轮系被锁定在停止模式,因此,连接到固定秒轮sfa2的柔性轴承4释放能量以使所述固定秒轮sfa2旋转,以便驱动擒纵轮组11。在跳跃模式中,一旦摆动件7不再与擒纵钻3a接触,则借助于摆动件7的轴向锁定小齿轮8的运转轮系就布置成通过秒轮小齿轮5和陀飞轮笼架15使所述固定秒轮sfa2枢转。此固定秒轮sfa2随着陀飞轮笼架15在第二旋转方向上旋转通过6
°
的角度,该第二旋转方向是与对应于一秒的角度跳跃的运动中由固定秒轮sfa2赋予擒纵轮组11的所述第一旋转方向相反的顺时针方向(sam)。在跳跃模式中,陀飞轮的笼架15沿顺时针方向(sam)被枢转通过6
°
的角度,其枢转方向与固定秒轮sfa2在停止阶段的枢转方向相反。在跳跃结束时,摆动件7返回至停靠在擒纵钻3a上,以便再次锁定运转轮系,但是固定秒轮sfa2除外。具有相同长度的两个杆部分的摆动件7执行180
°
旋转,以从跳跃模式切换到下一个停止模式。
57.应该指出的是,摆动件7通过中介轮9连接到运转轮系以及发条盒,以使摆动件7在每个1秒跳跃模式下绕其中央轴线旋转,并释放运转轮系5、8、9、10,以及本实施例中的陀飞轮笼架15。驱动运转轮系的一个或多个发条的力大于柔性轴承4中累积的机械能。因此,运转轮系一旦被释放就被立即触发,这使得能够保持随着时间的良好同步性,还考虑到擒纵机构和振荡器14在停止阶段期间继续运行,即使除了固定秒轮sfa2之外运转轮系被锁定。
58.上述力控制机构的所有元件都安装在机板、中间轮桥夹板、摆动件桥夹板上,其没有被示出以避免附图过载。
59.如上文已经提到的,固定秒轮sfa2包括与和擒纵轮组11同轴的带齿擒纵小齿轮12啮合的外周齿圈。包含于运转轮系中的中间轮10具有与带齿的轴向秒轮小齿轮5啮合的外周齿圈,秒轮小齿轮5与固定秒轮sfa2同轴,并且秒轮小齿轮5的心轴连接到陀飞轮笼架15。同样包含于运转轮系中的中介轮9包括与中间轮10的外周齿圈啮合的带齿轴向中介小齿轮19。中介轮9包括用于与所述轴向锁定小齿轮8啮合的外周齿圈,所述轴向锁定小齿轮8与旋
转式锁定元件7成一体,所述元件7是摆动件。在跳跃阶段中,当所述运转轮系被释放时,带齿轴向中介小齿轮19被布置成允许中间轮10旋转,以使中间轮10能够经由秒轮小齿轮5使陀飞轮笼架15在所述第二旋转方向sam上枢转。在此第二旋转方向上,秒轮小齿轮5通过使固定秒轮sfa2在方向sam上旋转来提供要累积在柔性轴承4中的能量。
60.为了确定特定的尺寸值以适配上述元件,可以提及的是,通过自中间轮10的轮系和大直径的摆动件7来实现锁定。这使得能够限制在秒钟功能期间的移动,能够限制摩擦,以及能够从陀飞轮笼架在机板上占据的表面上移除摆动件7的枢转。
61.中间轮的0.116rpm和摆动件的0.5rps(30rpm)之间的高比率需要中介轮组,即中介轮9。例如,这给出了中间轮10和中介轮9之间的比率z=120/7和m=0.07mm,以及中介轮9和摆动件7之间的比率z=90/6和m=0.07mm。
62.在一种替代方案中,可以从陀飞轮笼架15直接驱动摆动件7。这需要制造一种其外部齿圈与轴向锁定小齿轮8啮合的陀飞轮笼架,该轴向锁定小齿轮8是摆动件小齿轮。笼架15的1rpm与摆动件7的0.5rps(30rpm)之间的比率可以通过直接传动轮系来实现。外部陀飞轮齿圈与摆动件小齿轮之间的比率为z=180/6,其中m=0.079mm,并且摆动件的位置与前一方案相同。然而,陀飞轮笼架的美观性受到此外部齿圈的影响。
63.在支架3的擒纵钻3a上的锁定量(停止阶段)为0.08mm,这对于杠杆式擒纵机构是合适的,但是考虑到支架的长度可能相当小。通过增加擒纵钻3a的工作半径,该设计可以容易地增益25%。在任何情况下,增加在擒纵钻3a上的移动(为了安全性)都会增加与摩擦相关的风险。
64.需要提醒的是,例如参考图2,在停止阶段,通过摆动件7停靠在支架3的擒纵钻3a上来锁定运转轮系,并且擒纵轮组11及其擒纵小齿轮12被具有柔性轴承4的固定秒轮sfa2驱动。在跳跃阶段,支架3的擒纵钻3a释放运转轮系。秒轮小齿轮5旋转6
°
(一秒钟)并对柔性轴承4再次上条以用于秒轮2。sfa的支架3锁定运转轮系。支架3的指状件3b跟随凸轮6的运动,直到擒纵钻3a不再与摆动件7的端部接触,以便释放运转轮系。将不再对上文已经提及的在前面的图中足够清楚地示出的所有其他元件予以重复。
65.图3a、3b和3c示出柔性轴承4的三个不同实施例,其一方面可以附接在固定秒轮sfa 2的下方,另一方面可以附接在机芯的支撑件上,例如机板上。这样的实施例使获得更高的扭矩和更好的轴向保持成为可能。这三个实施例也不同于图1和图2所示以及上述的实施例。
66.图3a示出了柔性轴承4的固定部分4b和可移动部分4c,它们都通过若干弹性条带或带簧连接,优选两个v形的弹性条带。每个弹性条带4a连接每个固定部分4b和可移动部分4c的外围端部。两个贯通开口16设置在固定部分4b中以用于附接到机芯支撑件,并且两个贯通开口17设置在可移动部分4c中以用于附接到固定秒轮sfa2。这些贯通开口16、17的位置还取决于固定秒轮sfa2及其附接部件的尺寸。固定部分4b还包括轴向开口25,以用于与秒轮小齿轮5的轴线同轴地安装柔性轴承4,并且优选地安装在固定秒轮sfa2的轴向管上。
67.图3b示出了一个固定部分4b和两个可移动部分4c,每个可移动部分4c布置在固定部分的相应v形腔部中,并且彼此对称地相对。所述两个可移动部分4c还被若干弹性条带4a结合靠近柔性轴承4的轴向开口25的中间部分连接。固定部分4b中的两个贯通开口16形成在最紧凑的部分中,并且一个贯通开口17形成在每个可移动部分4c中。图3b中的这种结构
使得能够通过添加平行的成对条带来增加组件的返回扭矩和刚度。
68.最后,图3c示出了布置在可移动部分4c的具有宽的v形开口的腔部内的固定部分4b,该可移动部分4c在此例中包括轴向开口25。两个贯通开口16设置在固定部分4b中,并与轴向开口25布置在同一条线上。两个贯通开口17设置在可移动部分4c中,并且实际上与轴向开口25布置在同一条线上。在此实施例中,四个连续的弹性条带4a将可移动部分4c的第一内侧连接到固定部分4b的第一内侧,其中来自可移动部分4c的两个第一弹性条带4a被第一中央中间部分连接,而来自固定部分4b的两个第二弹性条带4a被第二中央中间部分连接,两个中间条带被第一外围中间部分连接。四个连续的弹性条带4a将可移动部分4c的第二内侧连接到固定部分4b的第二内侧,其中来自可移动部分4c的两个第一弹性条带4a被相同的第一中央中间部分连接,而来自固定部分4b的两个第二弹性条带4a被相同的第二中央中间部分连接,两个中间条带被第二外围中间部分连接。图3c的结构使得能够通过添加串联的成对条带来减小返回扭矩和增加旋转角度。
69.清楚的是,选择用来制造这些柔性轴承4的材料类型是用来制造金属弹簧的材料。在上述柔性轴承4的不同变型中,每个柔性轴承4均可以采取平板的形式,其厚度可以选择为基本上等于固定秒轮sfa2的中心部分的厚度。
70.此外,图4示出传统机械手表机芯的另一个示意性实施例,该机芯具有运转轮系和根据本发明的力控制机构。已经参照图1和2描述的一些元件再次出现在传统机芯的此实施例中,该机芯不具有陀飞轮。然而,通过柔性轴承4累积能量,该柔性轴承4具有连接到止动构件3的交叉条带4a,止动构件3连接到可旋转地安装在固定秒轮sfa2上的冠轮32。柔性轴承4包括固定基座部分和可移动部分,该固定基座部分可以用螺钉44紧固在手表机芯支撑件上,该可移动部分可以是连接到止动构件3的冠轮32本身。弹性条带4a例如通过焊点34固定在冠轮32上。在这种情况下,如上文所述,在机芯的停止阶段,柔性轴承4必须通过止动构件3沿逆时针方向(siam)来旋转固定秒轮sfa2。
71.在此实施例中,可以同样规定两个阶段,一方面是停止阶段,另一方面是跳跃阶段。在停止阶段,通过将锁定元件7的一个齿停靠在止动构件3上来锁定运转轮系5、8、9、10。通过柔性轴承4在与固定秒轮sfa2连接的止动构件3上的作用,擒纵轮组11由固定秒轮sfa2沿逆时针方向(siam)驱动。在跳跃阶段,止动构件3被移动以释放运转轮系。与此同时,秒轮小齿轮5沿顺时针方向(sam)旋转6
°
,从而经由行星轮51、52同样沿顺时针方向驱动冠轮53,这样还对柔性轴承4再次上条。由于止动构件3返回到锁定位置,止动构件3再次锁定运转轮系,以用于新的停止阶段的操作,以便维持与振荡器相连接的擒纵机构的操作。
72.行星轮51、52还安装成与和秒轮2同轴的秒轮小齿轮5相关联。在此实施例中,止动构件3可以是围绕一个轴线枢转并被柔性轴承4驱动的弯曲板3。在停止阶段,止动构件3与锁定元件7的一个齿接触,锁定元件7在中心部分包括轴向锁定小齿轮8,其用于驱动具有外周齿圈的中介轮9。锁定元件7可以包括在其外周的多个齿,以在停止阶段与止动构件3接触。在跳跃阶段,锁定元件7被释放以便旋转通过限定秒钟跳跃的120
°
角度,这是因为具有3个锁定齿。
73.在停止阶段,擒纵轮组11由固定秒轮sfa2经由其同轴擒纵小齿轮12驱动,该擒纵小齿轮12与固定秒轮sfa2的外周齿圈啮合。在跳跃阶段,这种累积的能量被提供给运转轮系以用于秒钟跳跃。由中介轮9的中介小齿轮19驱动的中间轮10具有用于与同轴的秒轮小
齿轮5啮合的外周齿圈,以用于秒钟跳跃。在对这种跳跃阶段没有直接影响的情况下,中间大轮21具有用于与同轴中间轮小齿轮20啮合的外周齿圈。通过秒轮小齿轮5的作用,当运转轮系运行时,通过行星轮51、52和冠轮53的差动布置,能够对sfa的柔性轴承4再次上条,以便返回到停止模式,其中止动构件3通过锁定元件7的一个齿锁定该锁定元件7。
74.应指出,具有交叉弹性条带4a的柔性轴承4是公知的。在w.h.wittrick的著作“the properties of crossed flexure pivots and the influence of the point at which the strips cross”(the aeronautical quarterly ii(4),第272-292页(1951))中,已经描述了条带在其长度的八分之七处交叉的一种特殊构型。此外,特别是在simon heinein的名为“conception des guidages flexibles”(design of flexure bearings)且由ppur出版社于2001年编辑的著作中,已知并描述了具有柔性条带的枢轴。
75.所述秒轮或轮组可以在由机板承载的滚珠轴承上枢转。
76.图5示出了所述机构在陀飞轮中心处从底部到顶部的截面图,如上面参考图1或图2部分示出的。在此图中特别注意到,秒轮小齿轮5是陀飞轮的笼架15的心轴。固定秒轮sfa与陀飞轮的轴线同心地枢转,但不会接触到陀飞轮,因为它被柔性轴承系统保持就位。陀飞轮的笼架15容纳擒纵机构,该擒纵机构具有擒纵轮组11、瑞士杠杆13,并且与振荡器14相关联,该振荡器14是摆轮/游丝机构。
77.固定秒轮sfa2与擒纵小齿轮12啮合,这意味着当陀飞轮笼架15在每秒旋转时,与振荡器相关联的擒纵机构也执行旋转,并且固定秒轮sfa2也旋转。
78.柔性轴承4紧固于固定秒轮sfa2上。为了实现这一点,至少一个附接装置27因此设置在开口17中或穿过开口17,以将固定秒轮sfa2附接到柔性轴承4的可移动部分,如上文所述。这些附接装置27优选是秒轮2的中心部的材料延伸部分,使得它们可以被强制插入柔性轴承4的开口17中。这些材料延伸部分27以及围绕这些材料延伸部分的边缘与秒轮的其余部分直接成一体,以形成单一部件。
79.如上文所述,支架3的指状边缘部分3b自由地布置在图2中可见的凸轮6的两个齿之间的导向腔部内。由于凸轮6在靠近其中心处固定地紧固在所述固定秒轮sfa2上,这会驱动支架3旋转,该支架3在另一侧包括锁定擒纵钻3a,用于在停止模式下锁定摆动件7。摆动件7还包括轴向锁定小齿轮8,当摆动件7在跳跃模式下被释放时,轴向锁定小齿轮8可以被旋转。所有其他元件已经在上文解释过,不再重复。
80.从刚才给出的描述中,本领域技术人员可以设计具有力控制机构的跳秒型的机械机芯手表的多种变型,而不脱离由权利要求限定的本发明的范围。所述机械机芯可以是具有固定秒轮sfa的传统机械机芯,该固定秒轮同样被连接成在停止阶段驱动或维持利用振荡器的擒纵轮组的运行。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1