一种基于北斗时钟信号的高精度时间同步系统及同步方法
1.本发明涉及一种时间同步系统及同步方法,尤其涉及一种基于北斗时钟信号的高精度时间同步系统及同步方法。
背景技术:
2.北斗卫星导航系统需要高精度的系统时间,系统时间的建立不仅依赖于精密频率源还依赖于高精度的时间同步技术。所谓时间同步是指两个周期性信号之间的时间差被消除或被最小化处理,并且处理后的时间差不会随时间延伸而发生改变的过程,时间同步最大的特征是两信号之间的时间差具有恒定不变性。目前的高精度时间同步方法建立在精密时间间隔测量技术之上,传统的时间间隔测量方法有时间扩展计数法、时间-幅度转换法、时间游标法、差分延时线法等,这些测量方法具有很高的测量分辨率,但电路结构复杂且在时间测量过程中存在
±
1个字的计数误差,无法满足北斗卫星1pps信号之间优于10ps级测量分辨率的超短时间间隔测量,大大降低了北斗卫星导航系统的可靠性以及授时和定位服务能力。
技术实现要素:
3.本发明的目的是提供一种基于北斗时钟信号的高精度时间同步系统及同步方法,采用差分延迟相位同步技术,能够大幅度提高北斗卫星与地面主控站之间的时间同步精度,加强北斗卫星导航系统的健壮性和授时服务能力。
4.本发明采用下述技术方案:
5.一种基于北斗时钟信号的高精度时间同步系统,包括北斗时钟信号产生模块、调理整形模块、fpga可编程计数器模块、时间转换器与测量模块、差分延迟相位同步模块、闸门控制器与数据处理模块、同步结果显示模块和电源模块;北斗时钟信号产生模块的信号输出端连接调理整形模块的信号输入端,调理整形模块的信号输出端分别连接fpga可编程计数器模块的信号输入端、时间转换器与测量模块的信号输入端、差分延迟相位同步模块的信号输入端和闸门控制器与数据处理模块的信号输入端,fpga可编程计数器模块的信号输出端、时间转换器与测量模块的信号输出端、差分延迟相位同步模块的信号输出端同时连接闸门控制器与数据处理模块的信号输入端,闸门控制器与数据处理模块的信号输出端分别连接调理整形模块的信号输入端和同步结果显示模块的信号输入端;
6.所述的北斗时钟信号产生模块采用北斗星载铷原子钟,用于产生10.23mhz频率信号和1pps时间信号即北斗时钟信号或北斗秒脉冲信号;
7.所述的调理整形模块由触发器74ls375n芯片、反相器74ls04n芯片、逻辑与门74ls08d芯片组成,用以将北斗时钟信号转换为北斗线脉冲信号;
8.所述的fpga可编程计数器模块采用cyclone iv芯片ep4ce75,用以产生可编程计数器(通过verilog硬件描述语言编程实现)和74ls系列芯片的逻辑功能,实现北斗线脉冲信号之间的时间间隔测量即10ns级分辨率的时间间隔测量;
9.所述的时间转换器与测量模块由电流源tny264pn芯片、开关2n7002芯片、小电容2220x7r芯片、mos管2sa1615 a1615芯片和集成有数模转换器的单片机msp430f248芯片组成,主要用于fpga可编程计数器模块部分量化误差时间间隔的测量,即100ps级分辨率的时间间隔测量;
10.所述的差分延迟相位同步模块由差分延迟单元组(其中每个差分延迟单元完全相同,每个差分延迟单元由两根完全相同且长度不等的低损耗同轴电缆线组成,两根同轴电缆线的长度差可调范围为0.2-2mm。)、逻辑与门74ls08d芯片、锁存器74ls279n芯片和单片机msp430f248芯片组成,主要用于时间转换器与测量模块部分量化时间误差的测量,即10ps级分辨率的时间间隔测量;
11.所述的闸门控制器与数据处理模块采用单片机msp430f248芯片,用于不同级别分辨率时间间隔测量中闸门开关信号的控制、北斗卫星1pps信号之间的时间同步调整和时间间隔测量数据的处理和计算;
12.所述的同步结果显示模块由lcd液晶显示器组成,用以输出北斗时钟信号时间同步检测的结果并进行显示。
13.电源模块对整个系统进行供电,可采用开关电源,相比于模拟电源具有输出稳定的优点。
14.传统的时间同步方法建立在时间间隔测量基础之上,相对于传统的时间同步技术,本发明消除了传统时间间隔测量中存在
±
1个字的计数误差,利用基于单片机控制的相位重合检测技术能够大幅度提高时间间隔测量和时间同步的精度,北斗卫星时钟信号的产生更加稳定,本发明中的电路结构简单,成本低廉,相位噪声低。由于采用了区别于传统时间间隔测量方法的差分延迟相位同步技术,本发明的时间间隔测量分辨率和时间同步精度均得到了大幅度提高,系统更加健壮,稳定性、可靠性更高,任意时刻北斗卫星1pps信号之间的时间同步精度优于10ps。
15.一种利用基于北斗时钟信号的高精度时间同步系统的同步方法,依次包括以下步骤:
16.a:对北斗时钟信号进行调理整形,使北斗秒脉冲信号转换为北斗线脉冲信号,转换前后,北斗秒脉冲信号和北斗线脉冲信号具有相同的相位,首先将北斗秒脉冲信号分别送入触发器74ls375n芯片的信号输入端和逻辑与门74ls08d芯片的a信号输入端,其次北斗秒脉冲信号经触发器74ls375n芯片延迟后送入反相器74ls04n芯片的信号输入端进行相位取反,然后将相位取反后的北斗秒脉冲信号送入逻辑与门74ls08d芯片的b信号输入端与原北斗秒脉冲信号进行逻辑与,最终将北斗秒脉冲信号转换为北斗线脉冲信号;
17.b:利用fpga技术,在单片机msp430f248芯片的控制下,设立可编程计数器的参考闸门,由fpga内部时钟频率锁相倍频获得的100mhz时基脉冲(分辨率10ns)对北斗卫星1pps信号之间的时间间隔进行填充,在实际闸门时间内对所填充的时基脉冲进行计数,获得被测时间间隔的粗测值;
18.由于用于时间间隔测量的时基脉冲信号的分辨率为10ns,故称为10ns级分辨率的时间间隔测量;由于在10ns级分辨率的时间间隔测量中存在
±
1个字的计数误差或者说时基脉冲与实际闸门开关信号的不同步,导致北斗时钟信号之间时间间隔测量的量化误差(不超过10ns),该量化误差包括两部分:一部分为实际闸门开门信号与实际闸门开启后第
一个时基脉冲信号之间的时间间隔,另一部分为实际闸门关门信号与实际闸门关闭后第一个时基脉冲信号之间的时间间隔,因此该过程测量的时间同步精度为ns量级;
19.c:在北斗时钟信号10ns级分辨率时间间隔测量的同时,利用时间转换器与测量模块对量化误差时间间隔进行测量;在单片机msp430f248芯片的控制下,利用tny264pn电流源通过2n7002开关在量化误差短时间间隔内对2220x7r小电容进行充电,由于充电时间即量化误差时间间隔极短,所以量化误差时间间隔与小电容上的充电电压成线性关系且相等,接着通过msp430f248单片机所集成的数模转换器对小电容上的充电电压进行高速采集并同时进行电压-时间转换,进而获得量化误差时间间隔的测量值;
20.由于msp430f248单片机所集成数模转换器的采集分辨率为100ps,故在量化误差时间间隔测量中称为100ps级分辨率的时间间隔测量;
21.d:将10ns级分辨率的时间间隔测量结果和100ps级分辨率的时间间隔测量结果送入msp430f248单片机,在msp430f248单片机的控制下,对两个北斗卫星1pps信号之间的时间间隔进行调整,使之接近同步,然后将调整后的两个北斗卫星1pps信号送入差分延迟相位同步模块对它们之间的时间间隔进行测量;首先将调整后接近同步的两个北斗卫星1pps信号送入差分延迟单元组,其次在每个差分延迟单元后使用逻辑与门74ls08d芯片对两个北斗卫星1pps信号之间的相位重合状态进行检测并将检测结果存储在对应的锁存器74ls279n中(若两个北斗卫星1pps信号在比对过程中完全相位重合,锁存器74ls279n存储1,否则存储0。),然后将差分延迟相位同步模块中所有锁存器74ls279n的存储数据送入msp430f248单片机进行处理,根据数据处理结果对北斗卫星1pps信号之间的时间间隔再次进行调整,最终获得优于10ps量级的高精度时间同步结果;
22.由于在差分延迟单元中两个北斗卫星1pps信号的延迟时间不同,这种延迟的积累最终会导致两个北斗卫星1pps信号之间的时间间隔通过同轴电线长度的延伸出现两个北斗卫星1pps信号之间相位的完全重合,而差分延迟单元中两根同轴电缆线的长度差范围(0.2-2mm)所对应的延迟时间范围(1-10ps)正是时间间隔测量分辨率的范围,因此在差分延迟相位同步模块中的时间间隔测量称为10ps级分辨率的时间间隔测量。
23.本发明的有益效果为:北斗时钟信号之间的时间同步检测,既要兼顾北斗卫星1pps信号之间时间间隔测量的范围和精度,也要兼顾测量的稳定性和系统的复杂度,本发明采用fpga技术、单片机调整和控制技术,实现了北斗卫星1pps信号的稳定输出,采用低噪声、低损耗的差分延迟相位同步检测方法,实现了北斗卫星1pps信号之间优于10ps级分辨率的时间间隔测量以及北斗卫星与地面主控站之间的高精度时间同步。
附图说明
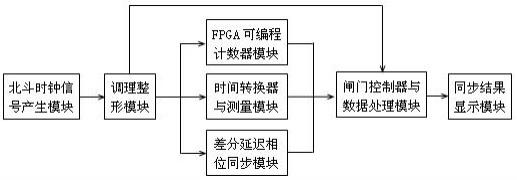
24.图1为本发明所述基于北斗时钟信号的高精度时间同步系统的原理框图。
具体实施方式
25.以下结合附图和实施例对本发明作以详细的描述:
26.如图1所示,本发明所述的基于北斗时钟信号的高精度时间同步系统,包括北斗时钟信号产生模块、调理整形模块、fpga可编程计数器模块、时间转换器与测量模块、差分延迟相位同步模块、闸门控制器与数据处理模块、同步结果显示模块和电源模块;北斗时钟信
号产生模块的信号输出端连接调理整形模块的信号输入端,调理整形模块的信号输出端分别连接fpga可编程计数器模块的信号输入端、时间转换器与测量模块的信号输入端、差分延迟相位同步模块的信号输入端和闸门控制器与数据处理模块的信号输入端,fpga可编程计数器模块的信号输出端、时间转换器与测量模块的信号输出端、差分延迟相位同步模块的信号输出端同时连接闸门控制器与数据处理模块的信号输入端,闸门控制器与数据处理模块的信号输出端分别连接调理整形模块的信号输入端和同步结果显示模块的信号输入端。
27.所述北斗时钟信号产生模块采用北斗星载铷原子钟,用于产生10.23mhz频率信号和1pps时间信号即北斗时钟信号(北斗秒脉冲信号);
28.所述的调理整形模块主要用于对北斗时钟信号进行脉冲变换,使北斗秒脉冲信号转换为北斗线脉冲信号,转换后所获得的北斗线脉冲信号与转换前的北斗秒脉冲信号具有相同的相位,这样更有利于北斗时钟信号之间的时间间隔测量;
29.调理整形模块由触发器74ls375n芯片、反相器74ls04n芯片、逻辑与门74ls08d芯片组成,触发器74ls375n芯片的信号输入端和逻辑与门74ls08d芯片的a信号输入端同时连接北斗时钟信号产生模块的信号输出端,触发器74ls375n芯片的信号输出端连接反相器74ls04n芯片的信号输入端,反相器74ls04n芯片的信号输出端连接逻辑与门74ls08d芯片的b信号输入端,逻辑与门74ls08d芯片的信号输出端即为调整整形模块的信号输出端;
30.所述的fpga可编程计数器模块采用cyclone iv芯片ep4ce75,用以产生可编程计数器(通过verilog硬件描述语言编程实现)和74ls系列芯片的逻辑功能,实现北斗线脉冲信号之间的时间间隔测量即10ns级分辨率的时间间隔测量;
31.利用fpga技术,在单片机msp430f248芯片的控制下,设立可编程计数器的参考闸门,由fpga内部时钟频率锁相倍频获得的100mhz时基脉冲(分辨率10ns)对北斗卫星1pps信号之间的时间间隔进行填充,在实际闸门时间内对所填充的时基脉冲进行计数,获得被测时间间隔的粗测值;
32.由于用于时间间隔测量的时基脉冲信号的分辨率为10ns,故称为10ns级分辨率的时间间隔测量;由于在10ns级分辨率的时间间隔测量中存在
±
1个字的计数误差或者说时基脉冲与实际闸门开关信号的不同步,导致北斗时钟信号之间时间间隔测量的量化误差(不超过10ns),该量化误差包括两部分:一部分为实际闸门开门信号与实际闸门开启后第一个时基脉冲信号之间的时间间隔,另一部分为实际闸门关门信号与实际闸门关闭后第一个时基脉冲信号之间的时间间隔,因此该过程测量的时间同步精度为ns量级。
33.所述的时间转换器与测量模块主要用于fpga可编程计数器模块部分量化误差时间间隔的测量,即100ps级分辨率的时间间隔测量,由电流源tny264pn芯片、开关2n7002芯片、小电容2220x7r芯片、mos管2sa1615 a1615芯片和集成有数模转换器的单片机msp430f248芯片组成,电流源tny264pn芯片的信号输入端连接调理整形模块的信号输出端,电流源tny264pn芯片的信号输出端连接开关2n7002芯片的信号输入端,开关2n7002芯片的信号输出端连接小电容2220x7r芯片的信号输入端,小电容2220x7r芯片的信号输出端连接mos管2sa1615 a1615芯片的信号输入端,mos管2sa1615 a1615芯片的信号输出端连接集成有数模转换器的单片机msp430f248芯片的信号输入端;
34.在北斗时钟信号10ns级分辨率时间间隔测量的同时,利用时间转换器与测量模块
对量化误差时间间隔进行测量,具体测量过程为:在单片机msp430f248芯片的控制下,以实际闸门开门信号作为开门信号,以实际闸门开启后第一个时基脉冲信号作为关门信号,以及以实际闸门关门信号为开门信号,以实际闸门关闭后第一个时基脉冲信号作为关门信号对量化误差时间间隔进行测量,利用tny264pn电流源通过2n7002开关在量化误差短时间间隔内对2220x7r小电容进行充电,由于充电时间即量化误差时间间隔极短,所以量化误差时间间隔与小电容上的充电电压成线性关系且相等,接着通过msp430f248单片机所集成的数模转换器对小电容上的充电电压进行高速采集并同时进行电压-时间转换,进而获得量化误差时间间隔的测量值;
35.由于msp430f248单片机所集成数模转换器的采集分辨率为100ps,故在量化误差时间间隔测量中称为100ps级分辨率的时间间隔测量。
36.所述的差分延迟相位同步模块主要用于时间转换器与测量模块部分量化时间误差的测量,由差分延迟单元组(其中每个差分延迟单元完全相同,每个差分延迟单元由两根完全相同且长度不等的低损耗同轴电缆线组成,两根同轴电缆线的长度差可调范围为0.2-2mm。)、逻辑与门74ls08d芯片、锁存器74ls279n芯片和单片机msp430f248芯片组成,差分延迟单元组的信号输入端连接调理整形模块的信号输出端,差分延迟单元组的信号输出端连接逻辑与门74ls08d芯片的信号输入端,逻辑与门74ls08d芯片的信号输出端连接锁存器74ls279n芯片的信号输入端,锁存器74ls279n芯片的信号输出端连接单片机msp430f248芯片的信号输入端;
37.差分延迟相位同步模块的测量过程为:将10ns级分辨率的时间间隔测量结果和100ps级分辨率的时间间隔测量结果送入msp430f248单片机,在msp430f248单片机的控制下,对两个北斗卫星1pps信号之间的时间间隔进行调整,使之接近同步,然后将调整后的两个北斗卫星1pps信号送入差分延迟相位同步模块对它们之间的时间间隔进行测量;首先将调整后接近同步的两个北斗卫星1pps信号送入差分延迟单元组,其次在每个差分延迟单元后使用逻辑与门74ls08d芯片对两个北斗卫星1pps信号之间的相位重合状态进行检测并将检测结果存储在对应的锁存器74ls279n中(若两个北斗卫星1pps信号在比对过程中完全相位重合,锁存器74ls279n存储1,否则存储0。),然后将差分延迟相位同步模块中所有锁存器74ls279n的存储数据送入msp430f248单片机进行处理,根据数据处理结果对北斗卫星1pps信号之间的时间间隔再次进行调整,最终获得优于10ps量级的高精度时间同步结果;
38.由于在差分延迟单元中两个北斗卫星1pps信号的延迟时间不同,这种延迟的积累最终会导致两个北斗卫星1pps信号之间的时间间隔通过同轴电线长度的延伸出现两个北斗卫星1pps信号之间相位的完全重合,而差分延迟单元中两根同轴电缆线的长度差范围(0.2-2mm)所对应的延迟时间范围(1-10ps)正是时间间隔测量分辨率的范围,因此在差分延迟相位同步模块中的时间间隔测量称为10ps级分辨率的时间间隔测量。
39.所述的闸门控制器与数据处理模块采用单片机msp430f248芯片,主要用于不同级别分辨率时间间隔测量中闸门开关信号的控制、北斗卫星1pps信号之间的时间同步调整和时间间隔测量数据的处理和计算;
40.所述的同步结果显示模块由lcd液晶显示器组成,用以输出北斗时钟信号时间同步检测的结果并进行显示。
41.电源模块对整个系统进行供电,可采用开关电源,相比于模拟电源具有输出稳定
的优点。
42.综上所述,传统的高精度时间同步方法建立在精密时间间隔测量技术之上,传统的时间间隔测量方法具有很高的测量分辨率,但电路结构复杂且在时间测量过程中存在
±
1个字的计数误差,无法满足北斗卫星1pps信号之间优于10ps级测量分辨率的超短时间间隔测量,大大降低了北斗卫星导航系统的可靠性以及授时和定位服务能力,为此本发明提供了一种基于北斗时钟信号的高精度时间同步系统及同步方法,采用差分延迟相位同步技术,能够大幅度提高北斗卫星与地面主控站之间的时间同步精度,加强北斗卫星导航系统的健壮性、授时及位置服务能力。
43.本发明中的电路结构简单,成本低廉,抗干扰能力强,由于采用了区别于传统时间同步技术的差分延迟相位同步方法,本发明的短时间间隔测量分辨率和时间同步精度均得到了大幅度提高,系统更加稳定,安全性、可靠性更高,任意时刻北斗卫星1pps信号之间的时间同步精度优于10ps。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1