基于滑动窗口的脉冲星时驯服铯原子钟的方法
1.本发明属于应用原子钟技术领域,具体涉及到一种基于滑动窗口的脉冲星时驯服铯原子钟的方法。
背景技术:
2.传统原子钟频率校准是将本地原子钟与基准原子钟信号进行比对测量,根据比对测量钟差数据,计算本地原子钟相对参考基准钟的频率偏差,将当前的频率偏差值作为下一段时间内频率偏差估计值,通过频率驾驭控制系统对原子钟频率进行校准,实现本地钟与基准钟频率一致。
3.脉冲星是致密天体,具有强磁场、强电场特性,辐射稳定的周期性脉冲信号,被誉为自然界最稳定的“天然钟”。利用天文观测技术可实现脉冲星自转参数的精确测量,目前脉冲星自转频率测量不确定度已达到10-15
量级,可作为基准频率源。当没有原子时基准频率参考信号时,利用地面脉冲星观测装置以原子钟为时间参考观测脉冲星信号,通过计时数据处理技术可获得原子钟与脉冲星时的钟差序列,若参考原子钟频率存在误差,则测量脉冲峰值相位相对于本征预报脉冲峰值相位随时间具有误差累积效应,如图1所示。利用钟差序列拟合得到原子钟频率漂移值,进而可实现对原子钟频率校准。被驯服原子钟最重要的特点是短期稳定性好,且原子时走势可预测性强,这有利于建立准确的原子时预报模型。综合各类原子钟性能及脉冲星时特点,铯原子钟的中长期稳定特性(月稳)优于氢钟,且主要表现为频率漂移。最适合用于被脉冲星时信号驯服。
4.脉冲星时特点是长期稳定性(年稳)好,产生时间可长期自主保持。但目前脉冲信号到达时间(time of arrive,toa)测量精度低,为百纳秒甚至微秒量级,原子钟测量精度已优于纳秒。利用测量噪声大的脉冲星时驾驭铯原子钟,至少需要3个月以上的脉冲星时与原子钟比对数据,才能计算得到原子钟频率漂移量。目前原子钟驾驭采用策略是原子钟建模数据与钟预报数据跨度一致,国家时间基准保持实验室的原子钟驾驭策略是建模数据跨度和预报时长均为30天。如果直接利用传统原子钟驾驭策略,基于30天跨度的脉冲星观测数据对原子钟进行建模时,由于脉冲星toa测量误差大,脉冲星时与原子钟比对数据误差大,则利用钟差比对数据计算的原子钟频率偏差值测量误差大,从而导致驾驭后原子钟时频信号准确度低。若利用脉冲星时长期稳特性好特点,以6个月以上时间跨度数据对原子钟建模,基于钟模型预报时长也为6个月以上,则由于预报时间太长而影响最终的时频信号精准度。如何有效利用脉冲星时长期稳定度高特点,又降低toa测量误差大对原子钟频率漂移量解算精度的影响是脉冲星时应用的关键。
技术实现要素:
5.本发明所要解决的技术问题在于克服现有技术的缺点,提供一种预报时间短、测量误差小、识别精度高、速度快的基于滑动窗口的脉冲星时驯服铯原子钟的方法。
6.解决上述技术问题所采用的技术方案是:一种基于滑动窗口的脉冲星时驯服铯原
子钟方法,由下步骤组成:
7.s1.脉冲星计时观测
8.以铯原子钟为参考对一颗毫秒脉冲星进行计时观测,并采集观测数据,每天观测1次,每次观测时长为30~60分钟;
9.s2.脉冲星计时数据处理
10.当观测数据时间跨度达到活动窗口大小时,利用脉冲星专业数据处理软件psrchive对观测数据进行处理,获得一系列脉冲到达时间数据序列,然后结合最新脉冲星星历表,利用计时专业数据处理软件tempo2对脉冲到达时间数据序列进行计时分析,获得脉冲星时与原子钟的钟差序列;
11.s3.利用活动窗口计算铯原子钟频率偏差
12.利用滑动窗口内脉冲星时与铯原子钟时的钟差序列,按铯原子钟模型公式(1)进行最小二乘拟合,获得铯原子钟频率偏差k;
13.基于脉冲星时观测数据建立的铯原子钟模型为:
14.x(t)=x0+(t-t0)
·
k+δ
at
+δ
pt
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
15.式中,x(t)是铯原子钟相对于脉冲星时钟差,x0为t0时刻铯原子钟相对于脉冲星时初始钟差,k为铯原子钟频率偏差,δ
at
为铯原子钟随机噪声,δ
pt
为脉冲星时噪声;
16.s4.铯原子钟频率校准
17.利用相位微调仪对铯原子钟频率进行驾驭,驾驭频度为1次/窗口滑动步长,即当观测数据每增加一个窗口滑动步长,则以当前时刻为终点,按滑动窗口大小提取观测数据,计算更新铯原子钟频率偏差k,并利用相位微调仪对铯原子钟频率进行驾驭;所述窗口滑动步长是滑动窗口的1/4~1/3倍。
18.作为一种优选的技术方案,所述的步骤s2中活动窗口大小为90天~180天。
19.作为一种优选的技术方案,所述的步骤s3中脉冲星时噪声δ
pt
选取白噪声的源。
20.本发明的有益效果如下:
21.本发明提出基于滑动窗口技术的铯原子钟相对于脉冲星钟频率偏差测量方法,解决了脉冲星脉冲到达时间测量误差大,对原子钟频率漂移测量精度影响,在窗口滑动步长不变的情况下,增加滑动窗口大小,有效提高了频率偏差测量精度。本发明将为基于脉冲星时实现原子钟的高精度频率溯源提供支撑,具有预报时间短、测量误差小、识别精度高、速度快的优点。
附图说明
22.图1是利用脉冲星测量原子钟误差原理图。
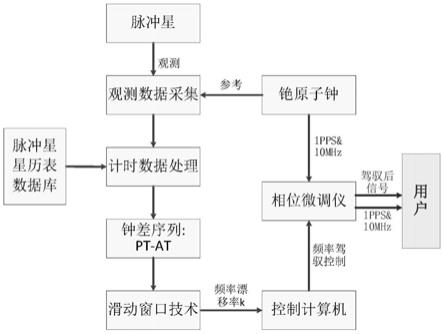
23.图2是本发明基于滑动窗口的脉冲星时驯服铯原子钟方法的流程图。
24.图3是滑动窗口的示意图。
具体实施方式
25.下面结合附图和实施例对本发明进一步详细说明,但本发明不限于下述的实施方式。
26.本实施例以基于滑动窗口利用脉冲星j0437-4715观测数据驯服铯原子钟的方法
为例,对基于滑动窗口的脉冲星时驯服铯原子钟的方法进行说明,如图2和图3,具体步骤如下:
27.s1.脉冲星计时观测
28.利用地面射电望远镜脉冲星观测系统,以铯原子钟为参考对脉冲星j0437-4715进行计时观测,并采集观测数据,每天观测1次,每次观测时长为60分钟;
29.s2.脉冲星计时数据处理
30.当观测数据时间跨度达到活动窗口大小即时,其中活动窗口大小为90天,也可以是180天,利用脉冲星专业数据处理软件psrchive对观测数据进行处理,获得一系列脉冲到达时间数据序列,然后结合最新脉冲星星历表,利用计时专业数据处理软件tempo2对脉冲到达时间数据序列进行计时分析,获得脉冲星时与铯原子钟时的钟差序列;
31.上述计时分析时,不对脉冲星星历表参数进行拟合;
32.s3.利用活动窗口计算铯原子钟频率偏差
33.利用滑动窗口内脉冲星时与铯原子钟时的钟差序列,按铯原子钟模型公式(1)进行最小二乘拟合,获得铯原子钟频率偏差k;
34.基于脉冲星时观测数据建立的铯原子钟模型为:
35.x(t)=x0+(t-t0)
·
k+δ
at
+δ
pt
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
36.式中,x(t)是铯原子钟相对于脉冲星时钟差,x0为t0时刻铯原子钟相对于脉冲星时初始钟差,k为铯原子钟频率偏差,δ
at
为铯原子钟随机噪声,δ
pt
为脉冲星计时噪声,在候选观测脉冲星时优先δ
pt
为白噪声的源,有助于降低脉冲星时噪声对铯原子钟频率偏差k拟合的影响;
37.s4.铯原子钟频率校准
38.利用相位微调仪对铯原子钟频率进行驾驭,驾驭频度为1次/窗口滑动步长,即当观测数据每增加一个窗口滑动步长,则以当前时刻为终点,按滑动窗口大小提取观测数据,计算更新铯原子钟频率偏差k,并利用相位微调仪对铯原子钟进行频率驾驭,所述窗口滑动步长为30天。
39.下面利用中科院国家授时中心自由运转的铯原子钟cs2147与国家标准时间utc(ntsc)实测钟差数据为参考,分析基于滑动窗口技术利用脉冲星时驾驭铯原子钟效果。首先分析利用utc(ntsc)驾驭cs2147钟的精度,原子钟建模数据跨度和预报时长均为30天。驾驭策略及结果见表1,驾驭后的cs2147相对于utc(ntsc)钟差rms为18.86ns,极差值即钟差数据的极大值与极小值之差为107.58ns。
40.表1.利用utc(ntsc)驾驭cs2147结果
[0041][0042]
下面以目前计时精度最高的脉冲星j0437-4715为基准,开展基于滑动窗口的脉冲
星时驾驭铯原子钟cs2147精度模拟分析。利用专业脉冲计时软件tempo2模拟昊平40米天线观测j0437-4715的计时数据,观测参考钟为cs2147,模拟数据参数设置如下:观测频次为1次/天,脉冲到达时间toa测量误差为0.1微秒。模拟观测数据跨度为铯原子钟cs2147与utc(ntsc)钟比对数据跨度。
[0043]
为了比较基于滑动窗口技术驾驭铯原子钟效果,利用模拟脉冲星数据对cs2147进行驾驭时,按以下两种方法分析:
[0044]
1)与上面utc(ntsc)驾驭cs2147策略一致;
[0045]
2)采用滑动窗口技术,设置滑动窗口大小为90天,窗口滑动步长为30天。下表为利用脉冲星j0437-4715驾驭铯原子钟cs2147的结果。
[0046]
表2.基于滑动窗口技术利用脉冲星时驾驭cs2147结果
[0047][0048]
根据上表可得知,采用传统驾驭原子钟技术,当钟建模数据跨度与预报时长一致即1个月,利用脉冲星时驾驭后的cs2147相对于utc(ntsc)极差值为246.93ns,钟差rms为44.72ns。利用滑动窗口技术,驾驭后的cs2147相对于utc(ntsc)极差值为103.5ns,rms为17.58ns。根据结果得知,利用传统驾驭策略,基于脉冲星时驾驭后的原子钟精度,明显低于采用utc(ntsc)为参考驾驭原子钟结果。当采用滑动窗口技术时,其驾驭结果略优于传统原子钟驾驭方法精度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1