基于北斗星基增强和精密星历服务的高精度时间溯源方法
1.本技术涉及时间溯源技术领域,特别是涉及一种基于北斗星基增强和精密星历服务的高精度时间溯源方法。
背景技术:
2.时间频率系统是促进国民经济和国防建设发展的重要战略资源,在国防军事、交通电力、金融证券等关键领域,均需要国家标准时间提供支撑,建设统一而稳定的时间频率系统符合国家发展的战略需要。由于时频设备的送检与校准工作难度增大,并且设备运输途中容易造成损坏,因此研究高精度远程时间频率溯源技术成为军事计量研究领域的重要课题。
3.基于全球导航卫星系统(global navigation satellite system,gnss)的时间溯源技术具备高精度、全天候、全覆盖等优点,是现阶段远程时间溯源的主要手段。目前我国国家时间频率计量标准装置的远程溯源主要依靠北斗二号卫星导航系统,该系统由5颗地球溯源轨道卫星、5颗倾斜地球溯源轨道卫星和4颗中轨道地球卫星组成。受卫星数量限制,北斗二号系统基本满足我国及周边地区的导航定位与授时服务,基本服务授时精度约为50纳秒。随着卫星导航系统建设步伐不断加快,我国于2020年7月建成覆盖全球的北斗三号卫星导航系统。与北斗二号系统相比,北斗三号在卫星数量、信号调制、服务类型等方面全面升级,基本服务授时精度可以达到10-20纳秒,并且在基本导航服务的基础上,还进一步提供星基增强、精密星历等亚米级高精度定位服务,新频率、新体制的北斗导航信号和北斗新服务在授时与远程时间溯源方面的潜力亟待开发研究。
4.近年来,基于精密星历服务的精密单点定位(precision point positioning,ppp)技术成为时频计量领域的研究热点,该技术使用伪距和高精度的载波相位观测值,在精密星历辅助下进行时间传递与溯源。不同于广播星历每两个小时播发一次,精密星历播发间隔为5至60秒,并且星历精度较广播星历显著提升,因此ppp时间传递的不确定度可以达到亚纳秒量级,国际计量局(bureau international des poids et mesures,bipm)与众多时间频率实验室广泛运该方法进行协调世界时和国家标准时间的计算维持。但受载波相位模糊度等因素影响,ppp时间溯源方法需要30分钟收敛时间,收敛时间较慢,严重制约基于北斗三号系统的高精度时间溯源和时间同步应用普及,因此研究基于北斗精密星历服务和星基增强服务的混合时间溯源方法对时间计量装置升级换代、时间溯源性能提升具有重要研究意义。
技术实现要素:
5.基于此,有必要针对上述技术问题,提供一种兼顾高精度、高收敛速度时间溯源方法。
6.一种基于北斗星基增强和精密星历服务的高精度时间溯源方法,包括:
7.获取当前时刻的伪距观测值以及载波相位观测值,所述伪距观测值以及载波相位
观测值根据原子钟输出的当前时刻本地时间生成本地时间戳;其中,所述伪距观测值以及载波相位观测值由双模态的全球卫星导航系统得到;
8.获取广播星历数据、精密星历改正数据以及星基增强改正数据;其中两种星历改正数据均包括系统时间;
9.根据所述伪距观测值、载波相位观测值、广播星历数据以及精密星历改正数据进行钟差计算,得到估计方差;
10.根据所述估计方差与预设值进行判断,若所述估计方差大于预设值,则根据所述伪距观测值、广播星历数据、星基增强改正数据进行粗控制钟差计算得到当前时刻的本地时间和系统时间之间的标准钟差;
11.若所述估计方差小于预设值,则根据所述伪距观测值、载波相位观测值、广播星历数据以及精密星历改正数据进行精控制钟差计算,得到当前时刻的本地时间和系统时间之间的精密钟差;
12.根据所述标准钟差或精密钟差对原子钟输出的当前时刻的本地时间进行调整,得到下一时刻的本地时间;其中下一时刻的本地时间用于生成下一时刻获取伪距观测值和载波相位观测值的本地时戳;
13.直至下一时刻的本地时间收敛于所述系统时间,则所述本地时间完成与系统标准时间溯源。
14.在其中一实施例中,采用精控制钟差计算所述精密钟差之前还包括:在上一时刻是采用粗控制钟差计算标准钟差之后,需连续预设次数所述估计方差小于预设值,才采用精控制钟差计算所述精密钟差。
15.在其中一实施例中,所述双模态的全球卫星导航系统包括:北斗卫星导航系统、gps。
16.在其中一实施例中,所述根据伪距观测值、载波相位观测值、广播星历数据以及精密星历改正数据进行钟差计算,得到估计方差包括:
17.基于伪距观测值、载波相位观测值、各类星历数据进行计算得到卡尔曼滤波估计参数以及对应的估计方差。
18.在其中一实施例中,所述粗控制钟差计算包括:
19.根据所述伪距观测值、广播星历数据以及星基增强改正数据进行标准单点定位计算得到所述标准钟差。
20.在其中一实施例中,所述精控制钟差计算包括:
21.根据所述伪距观测值、载波相位观测值、广播星历数据以及精密星历改正数据利用精密单点定位计算得到所述精密钟差。
22.在其中一实施例中,利用精密单点定位计算得到所述精密钟差时,其中采用精密钟差计算数学模型,对其进行求解后得到所述精密钟差,所述精密钟差计算数学模型为:
23.[0024][0025]
在公式(1)以及公式(2)中:
[0026]
上标g、c和分别表示gps、bds系统;
[0027]
上标s表示卫星;
[0028]
下标r表示接收机;
[0029]
表示伪距观测值(m);
[0030]
表示载波相位观测值(周);
[0031]
φ表示接收机天线与卫星天线相位中心之间的几何距离(m);
[0032]
dtr和dts表示接收机和卫星时钟的钟差(s);
[0033]
c表示真空中光速(m/s);
[0034]dr,if
和表示无电离层组合的接收机和卫星端伪距硬件延迟(m);
[0035]dr,if
和表示无电离层组合的未接收机和卫星端载波相位硬件延迟(周);
[0036]
tw表示测站对流层延迟湿分量(m);
[0037]
λ
if
表示载波波长(m);
[0038]nif
表示载波相位整周模糊度(周);
[0039]
τ
if
和υ
if
表示伪距观测值和载波相位观测值的未建模误差和噪声(m)。
[0040]
在其中一实施例中,所述根据所述标准钟差或精密钟差对原子钟输出的当前时刻的本地时间进行调整,得到下一时刻的本地时间包括:
[0041]
对所述标准钟差或精密钟差进行拟合后对应得到调整频率以及调整相位;
[0042]
根据所述调整频率以及调整相位对当前时刻的本地时间进行调整。
[0043]
本技术还提供了一种基于北斗星基增强和精密星历服务的高精度时间溯源装置,包括:
[0044]
观测值获取模块,用于获取当前时刻的伪距观测值以及载波相位观测值,所述伪距观测值以及载波相位观测值根据原子钟输出的当前时刻本地时间生成本地时间戳;其中,所述伪距观测值以及载波相位观测值由双模态的全球卫星导航系统得到;
[0045]
星历数据获取模块,用于获取广播星历数据、精密星历改正数据以及星基增强改正数据;其中两种星历改正数据均包括系统时间;
[0046]
估计方差得到模块,用于根据所述伪距观测值、载波相位观测值、广播星历数据以及精密星历改正数据进行钟差计算,并得到估计方差;
[0047]
钟差计算得到模块,用于根据所述估计方差与预设值进行判断,若所述估计方差大于预设值,则根据所述伪距观测值、广播星历数据、星基增强改正数据进行粗控制钟差计算得到当前时刻的本地时间和系统时间之间的标准钟差;若所述估计方差小于预设值,则根据所述伪距观测值、载波相位观测值、广播星历数据以及精密星历改正数据进行精控制钟差计算,得到当前时刻的本地时间和系统时间之间的精密钟差;
[0048]
本地时间调整模块,用于根据所述标准钟差或精密钟差对原子钟输出的当前时刻的本地时间进行调整,得到下一时刻的本地时间;其中下一时刻的本地时间用于生成下一
时刻获取伪距观测值和载波相位观测值的本地时戳;
[0049]
直至下一时刻的本地时间收敛于所述系统时间,则所述本地时间完成与系统标准时间溯源。
[0050]
一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
[0051]
获取当前时刻的伪距观测值以及载波相位观测值,所述伪距观测值以及载波相位观测值根据原子钟输出的当前时刻本地时间生成本地时间戳;其中,所述伪距观测值以及载波相位观测值由双模态的全球卫星导航系统得到;
[0052]
获取广播星历数据、精密星历改正数据以及星基增强改正数据;其中两种星历改正数据均包括系统时间;
[0053]
根据所述伪距观测值、载波相位观测值、广播星历数据以及精密星历改正数据进行钟差计算,得到估计方差;
[0054]
根据所述估计方差与预设值进行判断,若所述估计方差大于预设值,则根据所述伪距观测值、广播星历数据、星基增强改正数据进行粗控制钟差计算得到当前时刻的本地时间和系统时间之间的标准钟差;
[0055]
若所述估计方差小于预设值,则根据所述伪距观测值、载波相位观测值、广播星历数据以及精密星历改正数据进行精控制钟差计算,得到当前时刻的本地时间和系统时间之间的精密钟差;
[0056]
根据所述标准钟差或精密钟差对原子钟输出的当前时刻的本地时间进行调整,得到下一时刻的本地时间;其中下一时刻的本地时间用于生成下一时刻获取伪距观测值和载波相位观测值的本地时戳;
[0057]
直至下一时刻的本地时间收敛于所述系统时间,则所述本地时间完成与系统标准时间溯源。
[0058]
一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
[0059]
获取当前时刻的伪距观测值以及载波相位观测值,所述伪距观测值以及载波相位观测值根据原子钟输出的当前时刻本地时间生成本地时间戳;其中,所述伪距观测值以及载波相位观测值由双模态的全球卫星导航系统得到;
[0060]
获取广播星历数据、精密星历改正数据以及星基增强改正数据;其中两种星历改正数据均包括系统时间;
[0061]
根据所述伪距观测值、载波相位观测值、广播星历数据以及精密星历改正数据进行钟差计算,得到估计方差;
[0062]
根据所述估计方差与预设值进行判断,若所述估计方差大于预设值,则根据所述伪距观测值、广播星历数据、星基增强改正数据进行粗控制钟差计算得到当前时刻的本地时间和系统时间之间的标准钟差;
[0063]
若所述估计方差小于预设值,则根据所述伪距观测值、载波相位观测值、广播星历数据以及精密星历改正数据进行精控制钟差计算,得到当前时刻的本地时间和系统时间之间的精密钟差;
[0064]
根据所述标准钟差或精密钟差对原子钟输出的当前时刻的本地时间进行调整,得
到下一时刻的本地时间;其中下一时刻的本地时间用于生成下一时刻获取伪距观测值和载波相位观测值的本地时戳;
[0065]
直至下一时刻的本地时间收敛于所述系统时间,则所述本地时间完成与系统标准时间溯源。
[0066]
上述基于北斗星基增强和精密星历服务的高精度时间溯源方法,通过获取双模态的gnss观测值,并根据对估计方差进行判断后采用相应方法计算钟差从而对本地时间进行调整,使得本地时间与系统时间进行溯源。这样的时间溯源方法溯源时间更快、精度更高,适用于要求更高的精密时间频率系统中。
附图说明
[0067]
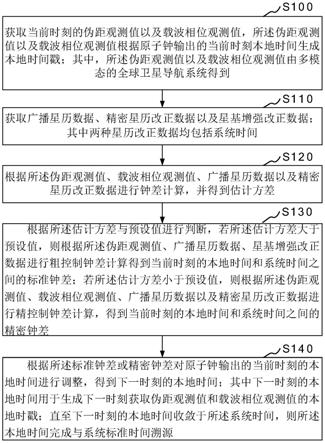
图1为一个实施例中时间溯源方法的流程示意图;
[0068]
图2为一个实施例中传统gnss时间溯源实验的结果示意图;
[0069]
图3为一个实施例中基于北斗星基增强和精密星历服务的时间溯源实验结果示意图;
[0070]
图4为一个实施例中时间溯源装置的结构框图;
[0071]
图5为另一个实施例中时间溯源装置的结构框图;
[0072]
图6为一个实施例中计算机设备的内部结构图。
具体实施方式
[0073]
为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处描述的具体实施例仅用以解释本技术,并不用于限定本技术。
[0074]
在上文中提到,在现有的溯源技术中,gnss时间溯源是目前时间溯源技术中效果较好的。然而,该方法存在收敛速度慢、无法快速应用于纳秒级时间溯源等实时应用场景。而无法达到纳秒级时间溯源精度的原因在于:第一,传统gnss时间溯源所使用的广播星历误差较大,其中卫星轨道精度为米级、卫星钟差精度为纳秒级;第二,传统gnss时间溯源使用伪距观测值传递时间信息,而伪距测量精度约为
±
3m左右,并且易受多径误差影响;第三,传统gnss溯源对电离层、对流层等延迟误差改正精度较低。
[0075]
针对上述问题,如图1所示,本技术提供了一种基于北斗星基增强和精密星历服务的高精度时间溯源方法,具体包括以下步骤:
[0076]
步骤s100,获取当前时刻的伪距观测值以及载波相位观测值,所述伪距观测值以及载波相位观测值根据原子钟输出的当前时刻本地时间生成本地时间戳;其中,所述伪距观测值以及载波相位观测值由双模态的全球卫星导航系统得到;
[0077]
步骤s110,获取广播星历数据、精密星历改正数据以及星基增强改正数据;其中两种星历改正数据均包括系统时间;
[0078]
步骤s120,根据伪距观测值、载波相位观测值、广播星历数据以及精密星历改正数据进行钟差计算,并得到估计方差;
[0079]
步骤s130,根据估计方差与预设值进行判断,若估计方差大于预设值,则根据伪距观测值、广播星历数据、星基增强改正数据进行粗控制钟差计算得到当前时刻的本地时间
和系统时间之间的标准钟差;
[0080]
若估计方差小于预设值,则根据伪距观测值、载波相位观测值、广播星历数据以及精密星历改正数据进行精控制钟差计算,得到当前时刻的本地时间和系统时间之间的精密钟差步骤s140,根据所述标准钟差或精密钟差对原子钟输出的当前时刻的本地时间进行调整,得到下一时刻的本地时间;其中下一时刻的本地时间用于生成下一时刻获取伪距观测值和载波相位观测值的本地时戳;
[0081]
直至下一时刻的本地时间收敛于所述系统时间,则所述本地时间完成与系统标准时间溯源。
[0082]
在本实施例中,通过本方法对本地时间进行不断的调整使其与系统时间溯源,而在进行调整参数的计算时,利用了双模态的gnss观测值、比广播星历数据更为精准的精密星历改正和星基增强改正数据计算本地时间和系统时间的钟差,使得计算得到的钟差更为准确,并且还针对计算钟差时过程较慢,通过对估计方差进行判断,先通过粗控制钟差计算,再采用精控制钟差计算的方式,以加快溯源时间。
[0083]
在步骤s100和s110中,伪距观测值以及载波相位观测值根据原子钟输出的当前时刻本地时间生成本地时间戳,而广播星历数据以及精密星历数据均包含有系统时间,这样在后续利用观测值及星历数据进行计算时,可以得到本地时间和系统时间之间的钟差,同时也体现在根据精密星历数据、伪距观测值以及载波相位观测值进行计算得到估计方差中。
[0084]
而为增加时间溯源方法的可靠性,利用了双模态的全球卫星导航系统以获取观测数据。
[0085]
在其中一实施例中,双模态的全球卫星导航系统也就是双模态的gnss包括:北斗卫星导航系统、gps。
[0086]
在步骤s110中,广播星历数据和星基增强改正数据用于后续进行粗控制钟差计算,而精密星历改正数据用于后续进行精控制钟差计算。
[0087]
由于在计算钟差时,采用的是精密单点定位算法,而该算法收敛时需要一定的时间,而在收敛前的精密单点算法的计算精度无法满足高精度调整需求,为加快时间溯源的速度,在本实施例中,以精密单点定位参数估计的钟差估计方差作为参考指标,将对本地时间进行调整的过程划分为粗调整阶段以及精调整阶段。
[0088]
在步骤s120中,根据伪距观测值、载波相位观测值、广播星历以及精密星历改正数据进行钟差计算,得到估计方差。其中,伪距观测值、载波相位观测值、各类星历数据进行计算得到卡尔曼滤波估计参数以及对应的估计方差。
[0089]
在步骤s130中,通过对估计方差与预设值进行判断,若所述估计方差大于预设值,则采用粗控制钟差计算得到标准钟差;若估计方差小于预设值则认为此时精密单点定位参数估计收敛,可转入精调整阶段,对本地时间进行精调整。
[0090]
在此需要说明的是,由于本方法对本地时间是一个不断调整的过程,也就是说对每个时刻(例如,一秒接收一次)接收的数据(这里的数据包括利用双模态全球卫星导航系统接收的观测数据以及从双模态全球卫星导航系统或者网络获取的星历数据)均会进行一次钟差计算,并不断对本地时间进行调整,在这个调整的过程中,本地时间是会不断靠近系统时间的,使得两者之间无限接近。
[0091]
在采用精控制钟差计算所述精密钟差之前还包括:在上一时刻是采用粗控制钟差计算标准钟差之后,需连续预设次数所述估计方差小于预设值,才采用精控制钟差计算所述精密钟差。
[0092]
具体的,在第一时刻的本地时间和系统时间进行估计方差时,若估计方差小于预设值,则可以直接采用精控制钟差计算得到精准钟差,对本地时间进行精调整。而第一时刻计算得到的估计方差是大于的预设值,则采用粗控制钟差计算得到标准钟差,对本地时间进行粗调整,在不断对本地时间进行粗调整后,估计方差会越来越小直至小于预设值,此时还是对本地时间进行粗调整,直至连续预设次数,估计方差小于预设值,则对本地时间进行精调整。
[0093]
在其中一实施例中,粗控制钟差计算包括:根据所述伪距观测值、广播星历以及星基增强改正数据进行标准单点定位计算得到所述标准钟差。由于标准定位计算无需估计模糊度参数,钟差结果收敛速度快,但总体精度较低。
[0094]
具体的,在进行标准钟差计算时,使用双频无电离层组合的伪距观测值。且在进行钟差计算之前,还对观测数据进行预处理,剔除异常钟差数据。
[0095]
在其中一实施例中,预设值为1ns。
[0096]
在其中一实施例中,预设次数为10次。
[0097]
在其中一实施例中,精控制钟差计算包括:根据所述伪距观测值、载波相位观测值、广播星历以及精密星历改正数据利用精密单点定位计算得到所述精密钟差。
[0098]
具体的,利用精密单点定位计算得到精密钟差时,其中采用精密钟差计算数学模型,对其进行求解后得到所述精密钟差,精密钟差计算数学模型为:
[0099][0100][0101]
在公式(1)以及公式(2)中:
[0102]
上标g、c和分别表示gps、bds系统;
[0103]
上标s表示卫星;
[0104]
下标r表示接收机;
[0105]
表示伪距观测值(m);
[0106]
表示载波相位观测值(周);
[0107]
φ表示接收机天线与卫星天线相位中心之间的几何距离(m);
[0108]
dtr和dts表示接收机和卫星时钟的钟差(s);
[0109]
c表示真空中光速(m/s);
[0110]dr,if
和表示无电离层组合的接收机和卫星端伪距硬件延迟(m);
[0111]dr,if
和表示无电离层组合的未接收机和卫星端载波相位硬件延迟(周);
[0112]
tw表示测站对流层延迟湿分量(m);
[0113]
λ
if
表示载波波长(m);
[0114]nif
表示载波相位整周模糊度(周);
[0115]
τ
if
和υ
if
表示伪距观测值和载波相位观测值的未建模误差和噪声(m)。
[0116]
在其中一实施例中,gps、bds系统的工作频段分别为gps:l1、l2,bds:b1、b2。
[0117]
对于双模gnss接收机而言,同一台接收机处理来自不同导航系统信号产生的硬件延迟是不同的,这些系统之间的硬件延迟偏差也被称为系统间偏差(inter-system biases,isbs),式(1)和(2)分别对不同导航系统的硬件延迟进行区分。在双模载波相位观测值的精密钟差计算模型中,以gps系统的钟差为参考值,将其他系统钟差表示为gps钟差和isb之和的形式,即:
[0118][0119]
综上所述,双模gnss载波相位钟差计算的估计参数向量为:
[0120][0121]
估计参数包括:1个接收机钟差参数、1个gps与bds之间的isb参数、1个天顶对流层延迟湿分量、数量等于观测系统总卫星数的模糊度参数。
[0122]
在本实施例中,使用先验坐标约束方法约束测站位置,卫星观测截止高度角设置为10。
[0123]
在本实施例中,在随机模型设置方面,使用基于卫星高度角的随机模型决定观测噪声水平;钟差的初始标准差设为60m;isb参数的初始标准差设为10m;对流层延迟湿分量初始标准差设为0.6m;模糊度参数的初始标准差设为60m;gps载波相位和伪距观测值的初始标准差设为3mm和0.3m;bds和galileo相位和伪距观测值的初始标准差设为6mm和0.6m,其中bds geo卫星由于轨道钟差质量较差,载波和伪距的初始标准差设为10mm和1m。
[0124]
在步骤s140中,根据标准钟差或精密钟差对原子钟输出的当前时刻的本地时间进行调整,得到下一时刻的本地时间包括:
[0125]
对标准钟差或精密钟差进行拟合后对应得到调整频率以及调整相位;
[0126]
根据调整频率以及调整相位对当前时刻的本地时间进行调整。
[0127]
在其中一实施例中,采用直接数字频率合成技术对原子钟输出的本地时间(时间频率信号)进行频率及相位调整。
[0128]
在不断对本地时间进行调整的同时,还会输出1pps(一秒一脉冲)信号作为统一的时间供各装置使用。这里的1pps是由本地时间生成的。
[0129]
接下来,根据本技术提供的高精度时间溯源方法与传统gnss时间溯源方法的实验数据:
[0130]
如图2表示传统gnss时间溯源实验在开机工作1小时内的1pps信号测量结果,以1台设备输出1pps信号作为出发,测量得到的另1台设备输出的1pps信号相位变化。图中相位偏差的最大值为3.3ns,最小值为-8.2ns,相位偏差的均方根误差约为2.9ns。由于标准单点定位算法不依赖载波相位观测值,因此算法无需收敛,但数据总体波动幅度非常大。
[0131]
图3表示本专利提出的基于北斗星基增强和精密星历服务的高精度时间溯源方法在开机1小时内的1pps信号测量结果,以1台设备输出1pps信号作为出发,测量得到的另1台设备输出的1pps信号相位变化。其中相位偏差的最大值为1.2ns,最小值为-2.0ns,均方根误差约为0.5ns。在精密单点定位算法收敛阶段,为了缩短时间溯源设备使用的收敛时间,采用星基增强数据提升基于伪距的标准单点定位算法钟差计算精度,从而使算法收敛前设备运行同让可以具备较高的时间溯源精度。
[0132]
则综合上述实验结果得出以下结论:
[0133]
本专利提出的时间溯源方法兼顾了时间溯源精度和收敛时间,克服了传统gnss时间溯源方法的收敛慢、精度差的问题。在粗控制阶段,使用基于星基增强服务的标准单点定位算法计算钟差进行时钟控制;在精控制阶段,使用基于精密星历服务的精密单点定位算法计算钟差进行时钟控制,有效保证了粗控制阶段的时间溯源精度,同时避免了精密单点定位算法的时间收敛问题,具备较好的实际工程运用前景。
[0134]
在分布式系统各节点中采用该方法可将本地时间溯源到统一的时间基准,解决分布式系统内的亚纳秒级时间溯源问题。研究成果不仅能够满足国防军事领域对时间溯源精度与灵活性的双重要求,同时还能为跨区域精密授时、时间尺度的快速备份、甚长基线干涉测量(very long baseline interferometry,vlbi)等科学研究中的时间溯源问题提供借鉴。
[0135]
应该理解的是,虽然图1的流程图中的各个步骤按照箭头的指示依次显示,但是这些步骤并不是必然按照箭头指示的顺序依次执行。除非本文中有明确的说明,这些步骤的执行并没有严格的顺序限制,这些步骤可以以其它的顺序执行。而且,图1中的至少一部分步骤可以包括多个子步骤或者多个阶段,这些子步骤或者阶段并不必然是在同一时刻执行完成,而是可以在不同的时刻执行,这些子步骤或者阶段的执行顺序也不必然是依次进行,而是可以与其它步骤或者其它步骤的子步骤或者阶段的至少一部分轮流或者交替地执行。
[0136]
在一个实施例中,如图4所示,提供了一种基于北斗星基增强和精密星历服务的高精度时间溯源装置,包括:观测值获取模块200、星历数据获取模块210、估计方差得到模块220、钟差计算得到模块230和本地时间调整模块240,其中:
[0137]
观测值获取模块200,用于获取当前时刻的伪距观测值以及载波相位观测值,所述伪距观测值以及载波相位观测值根据原子钟输出的当前时刻本地时间生成本地时间戳;其中,所述伪距观测值以及载波相位观测值由双模态的全球卫星导航系统得到;
[0138]
星历数据获取模块210,用于获取广播星历数据、精密星历改正数据以及星基增强改正数据;其中两种星历改正数据均包括系统时间;
[0139]
估计方差得到模块220,用于根据所述伪距观测值、载波相位观测值、广播星历数据以及精密星历改正数据进行钟差计算,并得到估计方差;
[0140]
钟差计算得到模块230,用于根据所述估计方差与预设值进行判断,若所述估计方差大于预设值,则根据所述伪距观测值、广播星历数据、星基增强改正数据进行粗控制钟差计算得到当前时刻的本地时间和系统时间之间的标准钟差;若所述估计方差小于预设值,则根据所述伪距观测值、载波相位观测值、广播星历数据以及精密星历改正数据进行精控制钟差计算,得到当前时刻的本地时间和系统时间之间的精密钟差;
[0141]
本地时间调整模块240,用于根据所述标准钟差或精密钟差对原子钟输出的当前
时刻的本地时间进行调整,得到下一时刻的本地时间;其中下一时刻的本地时间用于生成下一时刻获取伪距观测值和载波相位观测值的本地时戳;
[0142]
直至下一时刻的本地时间收敛于所述系统时间,则所述本地时间完成与系统标准时间溯源。
[0143]
关于基于北斗星基增强和精密星历服务的高精度时间溯源装置的具体限定可以参见上文中对于基于北斗星基增强和精密星历服务的高精度时间溯源方法的限定,在此不再赘述。上述利用双模态gnss观测值的时间溯源装置中的各个模块可全部或部分通过软件、硬件及其组合来实现。上述各模块可以硬件形式内嵌于或独立于计算机设备中的处理器中,也可以以软件形式存储于计算机设备中的存储器中,以便于处理器调用执行以上各个模块对应的操作。
[0144]
在另一个实施例中,如图5所示,提供了一种基于北斗星基增强和精密星历服务的高精度时间溯源装置,包括gnss接收模块、数据处理传输模块、精密调频移相模块以及原子钟模块;
[0145]
所述原子钟模块,用于输出本地时间;
[0146]
所述gnss接收模块,用于接收当前时刻双模态的伪距观测值以及载波相位观测值,伪距观测值以及载波相位观测值根据原子钟输出的当前时刻本地时间生成本地时间戳;
[0147]
所述数据处理传输模块,用于从双模态全球卫星导航系统或者网络获取广播星历以及精密星历改正和星基增强改正数据;其中两种星历改正数据均包括系统时间;根据所述伪距观测值、载波相位观测值、广播星历以及精密星历改正数据进行计算,得到估计方差;根据所述估计方差与预设值进行判断,若所述估计方差大于预设值,则采用粗控制钟差计算当前时刻的本地时间和系统时间之间的标准钟差;若所述估计方差小于预设值,则采用精控制钟差计算当前时刻的本地时间和系统时间之间的精密钟差;
[0148]
所述精密调频移相模块,用于根据标准钟差或精密钟差对原子钟输出的当前时刻的本地时间进行调整,得到下一时刻的本地时间;其中下一时刻的本地时间用于生成下一时刻获取的伪距观测值以及载波相位观测值的本地时戳;直至下一时刻的本地时间收敛于系统时间,则本地时间与系统时间溯源。
[0149]
具体的,gnss接收模块将接收到的双模态载波相位和伪距原始观测值以串口通信的方式输出至数据处理传输模块,数据处理模块使用观测数据和无线网卡获得的实时星历数据进行钟差计算,并解算得到钟差在进行预处理后生成调整数据,将调整数据输入精密调频移相模块,精密调频移相模块根据调整数据对原始信号(也就是本地时间,例如10mhz)依次进行调频操作、同步分频和移相操作得到后1pps信号,其中驾驭后10mhz信号作为多模gnss接收模块的外接频率源。
[0150]
在其中一实施例中,原子钟模块采用外置铷原子钟和基于直接数字频率合成技术的外置时钟,该时钟的频率准确度和稳定度要高于普通晶振,并且调频和移相精度更高。
[0151]
关于基于北斗星基增强和精密星历服务的高精度时间溯源装置的具体限定可以参见上文中对于基于北斗星基增强和精密星历服务的高精度时间溯源方法的限定,在此不再赘述。
[0152]
在一个实施例中,提供了一种计算机设备,该计算机设备可以是终端。该计算机设
备包括通过系统总线连接的处理器、存储器、网络接口、显示屏和输入装置。其中,该计算机设备的处理器用于提供计算和控制能力。该计算机设备的存储器包括非易失性存储介质、内存储器。该非易失性存储介质存储有操作系统和计算机程序。该内存储器为非易失性存储介质中的操作系统和计算机程序的运行提供环境。该计算机设备的网络接口用于与外部的终端通过网络连接通信。该计算机程序被处理器执行时以实现一种基于北斗星基增强和精密星历服务的高精度时间溯源方法。该计算机设备的显示屏可以是液晶显示屏或者电子墨水显示屏,该计算机设备的输入装置可以是显示屏上覆盖的触摸层,也可以是计算机设备外壳上设置的按键、轨迹球或触控板,还可以是外接的键盘、触控板或鼠标等。
[0153]
本领域技术人员可以理解,图6中示出的结构,仅仅是与本技术方案相关的部分结构的框图,并不构成对本技术方案所应用于其上的计算机设备的限定,具体的计算机设备可以包括比图中所示更多或更少的部件,或者组合某些部件,或者具有不同的部件布置。
[0154]
在一个实施例中,提供了一种计算机设备,包括存储器和处理器,存储器中存储有计算机程序,该处理器执行计算机程序时实现上述实施例中方法的步骤。
[0155]
在一个实施例中,提供了一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现上述实施例中方法的步骤。
[0156]
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于一非易失性计算机可读取存储介质中,该计算机程序在执行时,可包括如上述各方法的实施例的流程。其中,本技术所提供的各实施例中所使用的对存储器、存储、数据库或其它介质的任何引用,均可包括非易失性和/或易失性存储器。非易失性存储器可包括只读存储器(rom)、可编程rom(prom)、电可编程rom(eprom)、电可擦除可编程rom(eeprom)或闪存。易失性存储器可包括随机存取存储器(ram)或者外部高速缓冲存储器。作为说明而非局限,ram以多种形式可得,诸如静态ram(sram)、动态ram(dram)、同步dram(sdram)、双数据率sdram(ddrsdram)、增强型sdram(esdram)、同步链路(synchlink)dram(sldram)、存储器总线(rambus)直接ram(rdram)、直接存储器总线动态ram(drdram)、以及存储器总线动态ram(rdram)等。
[0157]
以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0158]
以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1