一种力矩单向输出机构的制作方法
本技术属于力矩传动,尤其是涉及一种力矩单向输出机构。
背景技术:
1、带有自动上弦功能的机械手表又细分为全自动机械手表和半自动机械手表,在半自动机械手表中,手表的摆锤朝向一个方向转动时能通过齿轮传动使得上弦,而摆锤朝向另一个方向转动时,则通过专门的棘轮和棘爪的配合,阻止力矩的传动,或通过齿轮径向的运动使得齿轮脱离齿轮组的啮合;现有技术中,为了使用棘轮阻止齿轮转动,往往会将棘轮和齿轮组成二联齿的形式使用,如此一来,增加了齿轮组的厚度,不利于减小产品体积,而移动齿轮的结构又需要产品具有较高的精度以及合理的布置,增加了设计难度;
2、现有技术中存在一些单向的力矩传动结构,但是其结构大多较为复杂,不利于组装,而手表内部空间有限,尤其是对于自动上弦系统而言,更应该尽量的减少占地,过于复杂的组件的小型化不利于产品的加工和组装,同时也导致零件强度较低,影响产品使用寿命;而传统齿轮的齿型与棘爪配合时,由于齿轮的齿面呈弧形,容易导致棘爪与齿牙脱钩,降低了结构的可靠性。
技术实现思路
1、有鉴于此,本实用新型旨在提出一种力矩单向输出机构,以更简单的结构实现力矩的单向传递,降低加工和组装难度,降低产品厚度。
2、为达到上述目的,本实用新型的技术方案是这样实现的:
3、一种力矩单向输出机构,包括
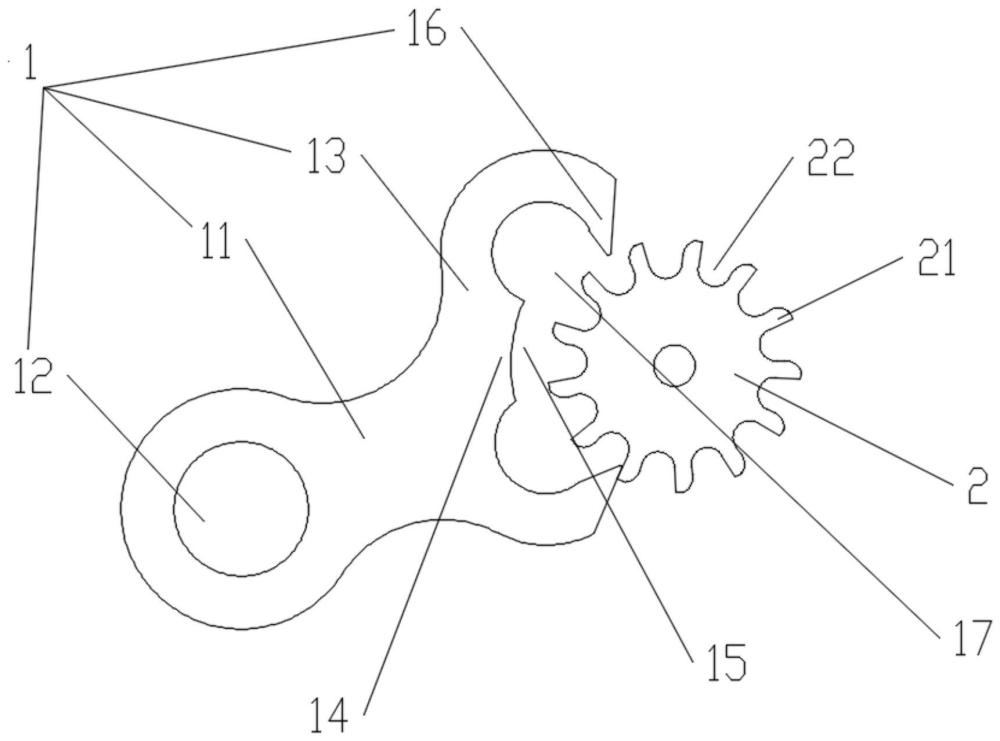
4、止逆爪,其包括转动部和分别置于转动部两侧的爪脚,且两爪脚之间留有容纳空间,每个所述爪脚分别包括止逆面和避让面;
5、单向转动齿轮,其周侧均匀设有多个单向啮合齿牙,每相邻的两个单向啮合齿牙之间留有止逆空间,至少有一个单向啮合齿牙在容纳空间内,且两个爪脚的端部交替的进入止逆空间内,每个单向啮合齿牙分别包括依次连接的啮合齿面和止逆齿面,所述止逆齿面为平面,且当单向转动齿轮沿第一方向转动时,啮合齿面顶部能与置于止逆空间内的爪脚的避让面接触,并将该爪脚向外推出止逆空间,当单向转动齿轮沿第二方向转动时,置于止逆空间内的爪脚的止逆面能紧抵于止逆齿面上。
6、进一步的,所述止逆爪还包括摆动杆,所述摆动杆能绕自身一端转动,另一端向两侧延伸出悬臂,两爪脚分别固设于悬臂的端部。
7、进一步的,悬臂中部还设有结构加强部,所述结构加强部朝向单向转动齿轮一侧开有弧形槽。
8、进一步的,止逆面靠近齿根处向外延伸出齿根加强部。
9、进一步的,当单向转动齿轮沿第二方向转动时,其中一个爪脚的止逆面能与止逆齿面贴合。
10、进一步的,在啮合齿面和止逆齿面之间设有齿顶面,且齿顶面为弧形,且齿顶面与啮合齿面之间倒有圆角。
11、进一步的,每个爪脚的避让面的朝向与单向转动齿轮的第一转动方向相对,每个爪脚的止逆面分别与单向转动齿轮的第二转动方向相同。
12、进一步的,其中一个爪脚的止逆面朝向容纳空间,另一个爪脚的避让面朝向容纳空间。
13、进一步的,所述单向转动齿轮的啮合齿面能与齿轮啮合。
14、进一步的,两个所述爪脚分别置于摆动杆远离单向转动齿轮的一端与单向转动齿轮的连线的两侧。
15、相对于现有技术,本实用新型所述的一种力矩单向输出机构具有以下优势:
16、本实用新型采用将齿轮的单向啮合齿牙设置成一侧啮合齿面另一侧止逆齿面的形式,与止逆爪相配合,使得当单向转动齿轮反向转动时能与爪脚的止逆面抵顶,从而实现单向的力矩传输,防止使用传统齿轮与止逆爪配合过程中,容易出现的止逆爪与齿牙滑动脱钩的现象;
17、采用在止逆齿面的齿根部设置齿根加强部的方式,提高单向啮合齿牙的强度,增加齿轮的使用寿命;
18、采用将两个爪脚分别设置在摆动杆端部与单向转动齿轮连线的两侧,使得两个爪脚能交替的进入止逆空间内,防止单向转动齿轮与止逆爪分离。
技术特征:
1.一种力矩单向输出机构,其特征在于:包括
2.根据权利要求1所述的一种力矩单向输出机构,其特征在于:所述止逆爪还包括摆动杆,所述摆动杆能绕自身一端转动,另一端向两侧延伸出悬臂,两爪脚分别固设于悬臂的端部。
3.根据权利要求2所述的一种力矩单向输出机构,其特征在于:悬臂中部还设有结构加强部,所述结构加强部朝向单向转动齿轮一侧开有弧形槽。
4.根据权利要求1所述的一种力矩单向输出机构,其特征在于:所述止逆齿面靠近齿根处向外延伸出齿根加强部。
5.根据权利要求1所述的一种力矩单向输出机构,其特征在于:当单向转动齿轮沿第二方向转动时,其中一个爪脚的止逆面能与止逆齿面贴合。
6.根据权利要求1所述的一种力矩单向输出机构,其特征在于:在啮合齿面和止逆齿面之间设有齿顶面,且齿顶面为弧形,且齿顶面与啮合齿面之间倒有圆角。
7.根据权利要求1所述的一种力矩单向输出机构,其特征在于:每个爪脚的避让面的朝向与单向转动齿轮的第一转动方向相对,每个爪脚的止逆面分别与单向转动齿轮的第二转动方向相同。
8.根据权利要求1所述的一种力矩单向输出机构,其特征在于:其中一个爪脚的止逆面朝向容纳空间,另一个爪脚的避让面朝向容纳空间。
9.根据权利要求1所述的一种力矩单向输出机构,其特征在于:所述单向转动齿轮的啮合齿面能与齿轮啮合。
10.根据权利要求2所述的一种力矩单向输出机构,其特征在于:两个所述爪脚分别置于摆动杆远离单向转动齿轮的一端与单向转动齿轮的连线的两侧。
技术总结
本技术提供了一种力矩单向输出机构,包括止逆爪,其包括转动部和分别置于转动部两侧的爪脚,每个爪脚分别包括止逆面和避让面;单向转动齿轮,其每相邻的两个单向啮合齿牙之间留有止逆空间,至少有一个单向啮合齿牙在两爪脚之间,且两个爪脚交替的进入止逆空间内,每个齿牙分别包括啮合齿面和止逆齿面,止逆齿面为平面,当单向转动齿轮沿第一方向转动时,啮合齿面能将爪脚推出止逆空间,当单向转动齿轮沿第二方向转动时,其中一个爪脚的止逆面能抵于止逆齿面上。本技术采用将单向啮合齿牙通过啮合齿面和止逆齿面,便于单向转动齿轮与其他齿轮啮合传动的同时,防止使用传统齿轮与止逆爪中容易出现的止逆爪与齿牙滑动脱钩的现象。
技术研发人员:孙丙霞,赵国望,王文轩,李慧娴
受保护的技术使用者:天津海鸥表业集团有限公司
技术研发日:20231013
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!