星载激光雷达高精度守时方法及系统与流程
本发明涉及卫星总体,具体地,涉及一种星载激光雷达高精度守时方法及系统。
背景技术:
1、传统的卫星被动光学遥感技术对太阳散射光依赖严重,只能在光照区进行成像测量,但以星载激光雷达为代表的卫星主动探测技术,不受光照影响,可进行全天时测量,且不受云和气溶胶遮挡影响,优势明显,因此已广泛应用与卫星遥感领域。
2、星载激光雷达通过周期性发送激光脉冲进行主动探测,高精度反演对雷达的时间精度提出了较高要求,且由于激光能量强,若因守时方案不佳导致出光频率过高,很可能导致激光器受损,影响激光雷达安全。
3、在公开号为cn107092183a的中国专利文献中,公开了一种基于gps秒脉冲的高精度校时实现方法,其包括以下步骤:步骤一:由星载计算机软件对接收到的gps时间码,进行有效性检查;若通过有效性检测,则进入步骤二;若不通过有效性检测,则进入步骤四;步骤二:由星载计算机软件对接收到的gps时间码,判定是否为上一周期值;若接收到的gps时间码,不是上一周期值,则进入步骤三;若接收到的gps时间码,是上一周期值,则gps时间码+1,然后进入步骤三。但该专利文献主要解决漏秒时卫星数管如何进行校时的问题,未针对同时接收秒脉冲和数管广播的载荷的守时问题。
4、在公开号为cn105890591b的中国专利文献中,公开了一种利用秒脉冲信号计算高精度星敏感器曝光时刻的方法,记录星载计算机发出秒脉冲信号的时间t_aocc和已发出的秒脉冲个数sync_aocc,从星敏感器读取姿态四元素和四元素对应的秒脉冲个数synccnt,以及距离最近一个秒脉冲的时间间隔datation,根据时间间隔datation确定脉冲差标志δsync_flag的有效性及计算脉冲个数差δsync,根据秒脉冲信号的时间t_aocc、秒脉冲的时间间隔datation和脉冲个数差δsync计算得到星敏感器曝光时刻对应的星载计算机时间t_st。但该专利文献解决的是使用秒脉冲对星敏高精度校时以确定卫星姿态的问题,与本发明解决的问题具有本质性不同。
5、在公开号为cn116073935a的中国专利文献中,公开了一种基于ieee1588协议的时钟同步系统及方法,包括:时间戳确定模块,用于接收一外部输入的秒脉冲信号,并确定秒脉冲信号在本地时钟时标下对应的时间戳;差值计算模块,连接时间戳确定模块,用于根据时间戳计算得到包含有频差信息的时间差值;调整模块,连接差值计算模块,用于在本地时钟作用下对时间差值进行处理,并在本地时钟的最大频率满足一预设频差阈值时输出一调整值;步进值确定模块,连接调整模块,用于根据调整值对一预先步进值进行处理,得到频差比率步进值,并根据频差比率步进值调整本地时钟对应的时间计数器的步进值,以使本地时钟与主时钟的频率同步。该专利文献用于使用秒脉冲信号生成时间戳,而本发明是针对导航和数管广播可能存在各种异常导致的时间间隔不符合问题为星载激光雷达量身定制了守时方案,与该专利文献采用的技术具有本质性不同。
6、在公开号为cn115175297a的中国专利文献中,公开了一种卫星载荷秒脉冲自主恢复同步方法具体包括以下步骤:步骤s1:秒脉冲同步及初始化基准差值计算;步骤s2:异常判决及秒脉冲修正差值测量;步骤s3:秒脉冲自主补偿恢复。但该专利文献需载荷提供返向脉冲信号,实现复杂,且未针对仅有数管广播时间这一状态制定守时方案。
7、在公开号为cn115047748b的中国专利文献中,公开了一种基于卫星导航信号的授时装置和方法,该装置包括本地参考源、信号接收与源差测量模块、可控分频模块、参数生成模块和可控延时模块,信号接收与源差测量模块接收卫星导航信号,对本地参考信号进行源差测量,得到本地参考信号的源差值;本地参考信号还输入到可控分频模块产生主时钟,参数生成模块利用本地参考信号的源差值产生输出频率调整值,对主时钟进行分频产生秒脉冲信号,再输入到可控延时模块,得到相对于卫星时校准的可控秒脉冲输出。但该专利文献在收到导航秒脉冲后输出秒脉冲,由于激光雷达直接对导航秒脉冲进行同步存在安全隐患,因此不适用于星载激光雷达。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种星载激光雷达高精度守时方法及系统。
2、根据本发明提供的一种星载激光雷达高精度守时方法,包括:
3、步骤s1:在激光雷达内设置寄存器;所述寄存器存放计数;
4、步骤s2:根据激光雷达的接收状态对激光雷达进行校准,完成激光雷达预设精度的自守时;所述接收状态包括接收卫星平台提供的秒脉冲、无法接收秒脉冲但接收bc广播时间和无法接收bc广播时间。
5、优选的,所述步骤s1包括设置第一寄存器和第二寄存器;所述第一寄存器存放整秒计数i;所述第二寄存器存放秒内0.1ms计数j。
6、优选的,所述步骤s2包括以下子步骤:
7、步骤s2.1:激光雷达处于接收卫星平台提供的秒脉冲状态时,使用经过合法性判断的秒脉冲对i和j进行校准,达到预设精度的自守时并发射激光脉冲,将时间戳i+j标记于每个激光脉冲回波信号遥感包中;
8、步骤s2.2:激光雷达处于无法接收秒脉冲但接收bc广播时间状态时,使用经过合法性判断的广播时间对i和j进行校准,达到预设精度的自守时并发射激光脉冲,将时间戳i+j标记于每个激光脉冲回波信号遥感包中;
9、步骤s2.3:激光雷达处于无法接收bc广播时间状态时,根据自身维持的时间进行守时并发射激光脉冲,将时间戳i+j标记于每个激光脉冲回波信号遥感包中。
10、优选的,所述步骤s2.1包括以下子步骤:
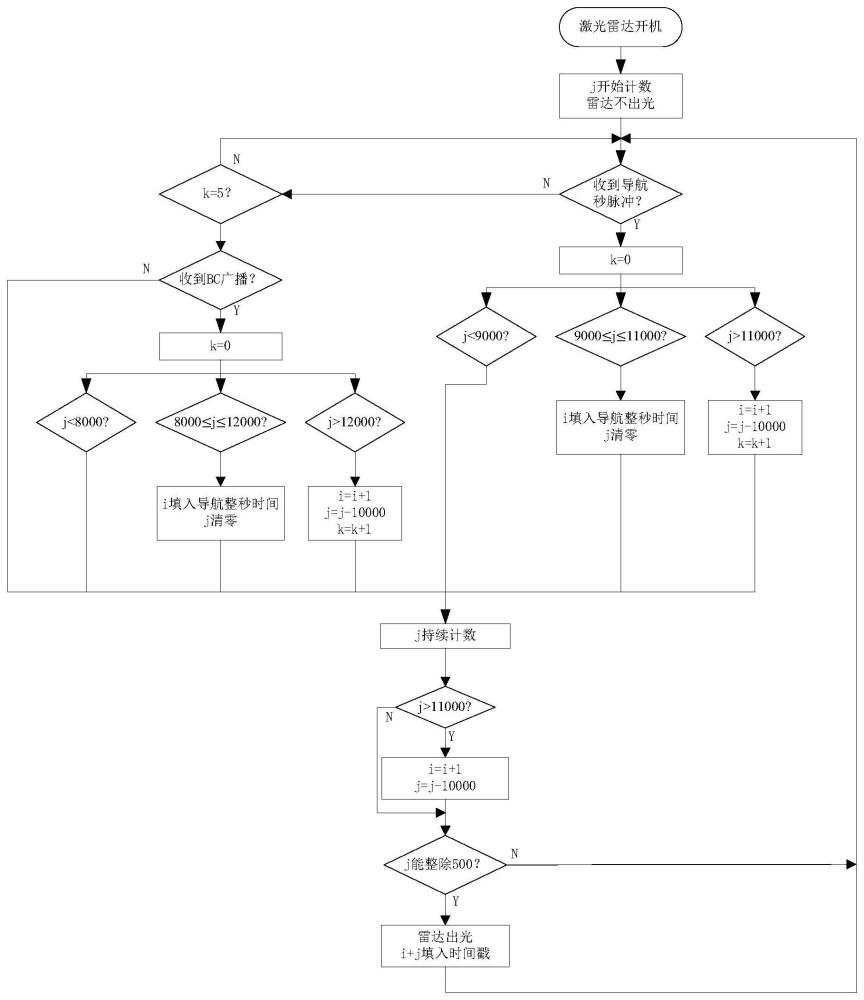
11、步骤s2.1.1:激光雷达开机,j开始进行0.1ms计数;
12、步骤s2.1.2:在收到首个秒脉冲时,将秒脉冲整秒时刻赋值给i,将j清零;
13、步骤s2.1.3:在收到后续秒脉冲时,对j的数值进行判断:
14、若j<9000,则不进行校时操作;
15、若9000≤j≤11000,则将秒脉冲整秒时刻赋值给i,将j清零;
16、若j>11000,则对i进行+1操作,将j-10000赋值给j;
17、步骤s2.1.4:若连续5s出现j>11000,则判定秒脉冲接收异常,使用bc广播数据对自身维持的时间进行校准。
18、优选的,所述步骤s2.2包括以下子步骤:
19、步骤s2.2.1:激光雷达开机,j开始进行0.1ms计数,不进行出光操作;
20、步骤s2.2.2:在收到首个时间广播中断时,将整秒时刻赋值给i,将j清零;
21、步骤s2.2.3:在收到后续时间广播中断时,对j的数值进行判断:
22、若j<8000,则不进行校时操作;
23、若8000≤j≤12000,则将秒脉冲整秒时刻赋值给i,将j清零;
24、若j>12000,则对i进行+1操作,将j-10000赋值给j。
25、优选的,所述激光雷达在接收到导航秒脉冲校时或bc广播时间前无时间基准,仅作自守时,不进行出光操作。
26、优选的,所述激光雷达在接收到导航秒脉冲校时或bc广播时间后依据脉冲频率,在i+j到达相应的时刻点时进行出光操作,并将i+j时刻传递至数据处理器,记录激光脉冲对应的时刻供数据反演时使用。
27、优选的,所述激光雷达的出光时刻被实时记录,若当前计算出的出光时刻与上一次出光时刻的时差小于某一影响激光器安全的阈值,则当前时刻不出光。
28、优选的,所述激光雷达在卫星时统系统出现故障时,仍保持预设精度的守时并运行,且遥感数据中记录雷达回波信号成像时间;所述故障包括秒脉冲间隔未达到预设值和广播时间未达到预设值。
29、根据本发明提供的一种星载激光雷达高精度守时系统,包括:
30、模块m1:在激光雷达内设置寄存器;所述寄存器存放计数;
31、模块m2:根据激光雷达的接收状态对激光雷达进行校准,完成激光雷达预设精度的自守时;所述接收状态包括接收卫星平台提供的秒脉冲、无法接收秒脉冲但接收bc广播时间和无法接收bc广播时间。
32、优选的,所述模块m1包括设置第一寄存器和第二寄存器;所述第一寄存器存放整秒计数i;所述第二寄存器存放秒内0.1ms计数j。
33、优选的,所述模块m2包括以下子模块:
34、模块m2.1:激光雷达处于接收卫星平台提供的秒脉冲状态时,使用经过合法性判断的秒脉冲对i和j进行校准,达到预设精度的自守时并发射激光脉冲,将时间戳i+j标记于每个激光脉冲回波信号遥感包中;
35、模块m2.2:激光雷达处于无法接收秒脉冲但接收bc广播时间状态时,使用经过合法性判断的广播时间对i和j进行校准,达到预设精度的自守时并发射激光脉冲,将时间戳i+j标记于每个激光脉冲回波信号遥感包中;
36、模块m2.3:激光雷达处于无法接收bc广播时间状态时,根据自身维持的时间进行守时并发射激光脉冲,将时间戳i+j标记于每个激光脉冲回波信号遥感包中。
37、优选的,所述模块m2.1包括以下子模块:
38、模块m2.1.1:激光雷达开机,j开始进行0.1ms计数;
39、模块m2.1.2:在收到首个秒脉冲时,将秒脉冲整秒时刻赋值给i,将j清零;
40、模块m2.1.3:在收到后续秒脉冲时,对j的数值进行判断:
41、若j<9000,则不进行校时操作;
42、若9000≤j≤11000,则将秒脉冲整秒时刻赋值给i,将j清零;
43、若j>11000,则对i进行+1操作,将j-10000赋值给j;
44、模块m2.1.4:若连续5s出现j>11000,则判定秒脉冲接收异常,使用bc广播数据对自身维持的时间进行校准。
45、优选的,所述模块m2.2包括以下子模块:
46、模块m2.2.1:激光雷达开机,j开始进行0.1ms计数,不进行出光操作;
47、模块m2.2.2:在收到首个时间广播中断时,将整秒时刻赋值给i,将j清零;
48、模块m2.2.3:在收到后续时间广播中断时,对j的数值进行判断:
49、若j<8000,则不进行校时操作;
50、若8000≤j≤12000,则将秒脉冲整秒时刻赋值给i,将j清零;
51、若j>12000,则对i进行+1操作,将j-10000赋值给j。
52、优选的,所述激光雷达在接收到导航秒脉冲校时或bc广播时间前无时间基准,仅作自守时,不进行出光操作。
53、优选的,所述激光雷达在接收到导航秒脉冲校时或bc广播时间后依据脉冲频率,在i+j到达相应的时刻点时进行出光操作,并将i+j时刻传递至数据处理器,记录激光脉冲对应的时刻供数据反演时使用。
54、优选的,所述激光雷达的出光时刻被实时记录,若当前计算出的出光时刻与上一次出光时刻的时差小于某一影响激光器安全的阈值,则当前时刻不出光。
55、优选的,所述激光雷达在卫星时统系统出现故障时,仍保持预设精度的守时并运行,且遥感数据中记录雷达回波信号成像时间;所述故障包括秒脉冲间隔未达到预设值和广播时间未达到预设值。
56、与现有技术相比,本发明具有如下的有益效果:
57、1、本发明针对激光雷达能够正常接收卫星平台提供的高精度秒脉冲、秒脉冲接收异常但可正常接收bc广播时间、无法正常接收bc广播时间这三种状况,分别制定了雷达守时方法,确保了星载激光雷达在卫星时统系统出现异常(如秒脉冲间隔异常、广播时间异常等)时仍然保持高精度守时和按时、安全出光,遥感数据中精确记录雷达回波信号成像时间,为激光雷达数据的高精度反演奠定了基础。
58、2、本发明实现简单,能够广泛应用于激光雷达数据在轨安全工作、遥感数据高精度反演等领域中,具有较好的实用性。
59、本发明的其他有益效果,将在具体实施方式中通过具体技术特征和技术方案的介绍来阐述,本领域技术人员通过这些技术特征和技术方案的介绍,应能理解所述技术特征和技术方案带来的有益技术效果。
- 还没有人留言评论。精彩留言会获得点赞!