一种矿山井下无人驾驶电机车急停控制器的制作方法
1.本实用新型涉及一种矿山井下无人驾驶电机车急停控制器,属于电子信息中微电子技术领域。
背景技术:
2.在工业4.0及中国制造2025的时代大背景下,智慧矿山建设已刻不容缓。当前矿山井下铁矿运输主要通过汽车运输或者经铲运机将采区矿石运输至附近溜井处,通过溜井将矿石下放至中间平台,中间平台通过电机车有轨铁路将各个溜井的矿石运输至卸载站,卸载站再次将矿石集中下放至最下方平台,最下方平台将铁矿石打碎通过皮带传输至地面。有的矿山虽已实现无人驾驶电机车有轨运输,但在无人驾驶有轨运输中,主控制板常常兼顾很多信号采集及主要逻辑控制,是整个无人驾驶控制的心脏,因而在无人驾驶运行过程中,不排除会出现主控板故障、网络中断等情况,影响矿山安全生产。因此有必要设计一种急停刹车控制器,实现无人驾驶控制系统外的刹车制动,防止安全事故的发生,进一步提升无人驾驶的安全性。
技术实现要素:
3.为提升无人驾驶的安全性,本实用新型提供一种矿山井下无人驾驶电机车急停制动控制器。
4.本实用新型通过下述技术方案实现:一种矿山井下无人驾驶电机车急停控制器,包括安装在无人驾驶电机车上的壳体,设置在壳体中的微控制器、电源、刹车控制器、刹车信号采集器、以太网通讯器,其特征在于微控制器与电源、刹车控制器、刹车信号采集器、以太网通讯器相连,电源与刹车控制器、刹车信号采集器相连。以便在需要停车时,通过远程按下急停按钮,并通过以太网通讯器将停车信号送微控制器,或者刹车信号采集器采集到电机电流和母线电压值异常时送微控制器,经微控制器内设置的相应软件处理后,将处理信号送刹车控制器,控制刹车电磁阀气动刹车,同时控制弓架升降电磁阀使弓架下降、脱离滑触线,从而实现刹车制动、脱离滑线而使无人驾驶电机车停止运行,保证无人驾驶电机车的安全运行。
5.所述刹车控制器包括安装在壳体中的刹车继电器、弓架升降继电器,以及安装在无人驾驶电机车上的刹车电磁阀、弓架升降电磁阀,其中:刹车继电器与刹车电磁阀相连,弓架升降继电器与弓架升降电磁阀相连,刹车继电器、弓架升降继电器的线圈通过普通io口与微控制器、电源相连,以便刹车制动时,微控制器输出电平信号驱动刹车继电器和弓架升降继电器,控制刹车电磁阀气动刹车,同时控制弓架升降电磁阀使弓架下降、脱离滑触线,从而实现刹车制动、脱离滑线而使无人驾驶电机车停止运行。
6.所述刹车信号采集器还分别与电机、母线相连,用于采集电机电流信号和母线电压信号,并将采集的信号送微控制器,用于判断信号是否异常、是否需要执行刹车动作。
7.所述微控制器通过spi接口与以太网通讯器相连,以太网通讯器通过rj45接口与
远程交换机相连,用于传递数据。
8.所述微控制器为市购普通单片机微控制器。
9.所述电源为24v电源输入,通过开关电源芯片转换为5v电源,整流滤波后再通过一个稳压芯片转化为3.3v电源,整流滤波后给单片机及其它模块供电。
10.本实用新型具有下列优点和效果:采用上述方案,可方便地在需要停车时,通过远程按下急停按钮,并通过以太网通讯器将停车信号送微控制器,或者刹车信号采集器采集到电机电流和母线电压值异常时送微控制器,经微控制器内设置的相应软件处理后,将处理信号送刹车控制器,控制刹车电磁阀气动刹车,同时控制弓架升降电磁阀使弓架下降、脱离滑触线,从而实现刹车制动、脱离滑线而使无人驾驶电机车停止运行,保证无人驾驶电机车的安全运行。结构简单,体积小易于安装,是无人驾驶电机车安全运行的第二道防线,有效提高生产安全性,能够实现远程紧急制动及现场紧急制动,实现方式多样,扩展性强。
附图说明
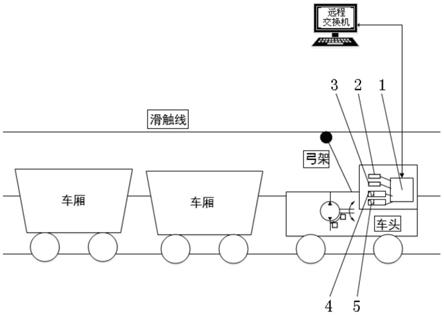
11.图1为本实用新型结构示意图。
12.图2为本实用新型的结构框图。
13.图3为微控制器电路图。
14.图4为电源电路图。
15.图5为刹车控制器电路图。
16.图6为刹车信号采集器电路图。
17.图7为以太网通讯器电路图。
具体实施方式
18.下面结合附图对本实用新型做进一步描述。
19.如图1—图7所示,本实用新型提供的矿山井下无人驾驶电机车急停控制器,包括安装在无人驾驶电机车上的壳体1,设置在壳体1中的微控制器、电源、刹车控制器、刹车信号采集器、以太网通讯器,其特征在于微控制器与电源、刹车控制器、刹车信号采集器、以太网通讯器相连,电源与刹车控制器、刹车信号采集器相连。
20.所述刹车控制器包括安装在壳体1中的刹车继电器、弓架升降继电器,以及安装在无人驾驶电机车上的刹车电磁阀4、弓架升降电磁阀5,其中:刹车继电器与刹车电磁阀4相连;弓架升降继电器与弓架升降电磁阀5相连,刹车继电器、弓架升降继电器的线圈通过普通io口与微控制器、电源相连,以便刹车制动时,微控制器输出电平信号驱动刹车继电器和弓架升降继电器,控制刹车电磁阀4气动刹车,同时控制弓架升降电磁阀5使弓架下降、脱离滑触线,从而实现刹车制动、脱离滑线而使无人驾驶电机车停止运行。
21.所述刹车信号采集器还分别与电机3、母线2相连,用于采集电机电流信号和母线电压信号,并将采集的信号送微控制器,用于判断信号是否异常、是否需要执行刹车动作。
22.所述微控制器通过spi接口与以太网通讯器相连,以太网通讯器通过rj45接口与远程交换机相连,用于传递数据。
23.所述微控制器主要是型号为stm32f103cbt6芯片以及外围的晶振电路、上电复位电路、和电源滤波电路。
24.所述电源为24v电源输入,通过开关电源芯片lm2596转换为5v电源,整流滤波后通过稳压芯片lm1117转化为3.3v电源向微控制器及其它部件供电。
25.所述刹车继电器为达林顿管uln2003和5v直流继电器及相关外围电路,微控制器的41、40管脚分别通过2个1k欧姆的隔离电阻和uln2003的6、7管脚相连,uln2003的12、13管脚分别与2个5v直流继电器的线圈2相连。
26.所述刹车信号采集器为5v电压采集电路,电机电流信号与微控制器的12管脚相连,母线电压信号与微控制器的13管脚相连。
27.所述以太网为enc28j60芯片、hr911105a网络变压器及其外围电路,其中enc28j60芯片管脚的6脚、7脚、8脚、9脚、10脚分别与微控制器的27脚、28脚、26脚、25脚、29脚相连,enc28j60芯片管脚的12脚、13脚、16脚、17脚、26脚、27脚分别与hr911105a网络变压器的6脚、3脚、2脚、1脚、9脚、12脚相连,实现微控制器与远程操作台的数据交换。
28.当需要停车时可通过远程交换机按下急停按钮后,通过以太网通讯器将停车信号送微控制器(或者刹车信号采集器采集到电机电流和母线电压异常需要停车时送微控制器),经微控制器内设置的相应软件处理后,将处理信号送刹车控制器,控制刹车电磁阀4气动刹车,同时控制弓架升降电磁阀5使弓架下降、脱离滑触线,从而实现刹车制动、脱离滑线而使无人驾驶电机车停止运行,保证无人驾驶电机车的安全运行。
技术特征:
1.一种矿山井下无人驾驶电机车急停控制器,包括安装在无人驾驶电机车上的壳体,设置在壳体中的微控制器、电源、刹车控制器、刹车信号采集器、以太网通讯器,其特征在于微控制器与电源、刹车控制器、刹车信号采集器、以太网通讯器相连,电源与刹车控制器、刹车信号采集器相连。2.根据权利要求1所述的矿山井下无人驾驶电机车急停控制器,其特征在于所述刹车控制器包括安装在壳体中的刹车继电器、弓架升降继电器,以及安装在无人驾驶电机车上的刹车电磁阀、弓架升降电磁阀,其中:刹车继电器与刹车电磁阀相连,弓架升降继电器与弓架升降电磁阀相连,刹车继电器、弓架升降继电器的线圈通过普通io口与微控制器、电源相连。3.根据权利要求1所述的矿山井下无人驾驶电机车急停控制器,其特征在于所述刹车信号采集器还分别与电机、母线相连。4.根据权利要求1所述的矿山井下无人驾驶电机车急停控制器,其特征在于所述微控制器通过spi接口与以太网通讯器相连,以太网通讯器通过rj45接口与远程交换机相连。
技术总结
本实用新型提供一种矿山井下无人驾驶电机车急停控制器,包括微控制器、电源、刹车控制器、刹车信号采集器、以太网通讯器,其特征在于微控制器与电源、刹车控制器、刹车信号采集器、以太网通讯器相连,电源与刹车控制器、刹车信号采集器相连。在需要停车时,通过远程按下急停按钮或者刹车信号采集器采集到电机电流和母线电压值异常时,送微控制器内设置的软件处理后,将处理信号送刹车控制器,控制刹车电磁阀气动刹车,同时控制弓架升降电磁阀使弓架下降、脱离滑触线,从而实现刹车制动、脱离滑线而使无人驾驶电机车停止运行,保证无人驾驶电机车的安全运行。车的安全运行。车的安全运行。
技术研发人员:巫乔顺 尹业华 皮坤 肖彦龙 陆广仁 刘春霖
受保护的技术使用者:云南昆钢电子信息科技有限公司
技术研发日:2020.12.16
技术公布日:2021/9/14
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1