自主移动体的控制装置以及自主移动体的制作方法
本公开涉及自主移动体的控制装置以及自主移动体。
背景技术:
1、专利文献1公开了自主移动体。该自主移动体基于前轮与后轮之间的转速差来检测搭乘了乘客输送机的梯级。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开平5-80840号公报
技术实现思路
1、发明要解决的问题
2、然而,在专利文献1所记载的自主移动体中,不对乘入乘客输送机的梯级的时机进行控制。因此,存在自主移动体不能适当地搭乘乘客输送机的情况。
3、本公开是为了解决上述课题而完成的。本公开的目的在于提供一种能够使自主移动体容易地乘入乘客输送机的梯级的自主移动体的控制装置以及自主移动体。
4、用于解决问题的手段
5、本公开所涉及的自主移动体的控制装置具备控制部,该控制部基于自主移动体的驱动轮或被驱动轮的转速的变化,检测所述自主移动体开始移动至乘客输送机的梯级的情况。
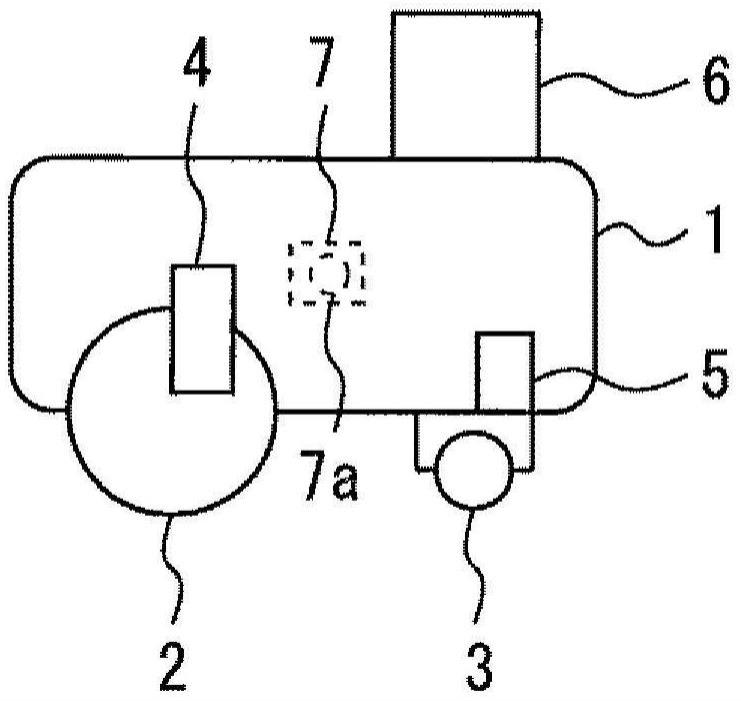
6、本公开的自主移动体具备:主体,其形成外廓;驱动轮,其设置于所述主体,产生旋转驱动力;被驱动轮,其设置于所述主体,不产生旋转驱动力;以及所述控制装置,其设置于所述主体,通过使所述驱动轮旋转来控制所述主体的移动。
7、发明的效果
8、根据本公开,控制装置基于自主移动体的驱动轮或被驱动轮的转速的变化,检测所述自主移动体开始移动至乘客输送机的梯级的情况。因此,能够使自主移动体容易地乘入乘客输送机的梯级。
技术特征:
1.一种自主移动体的控制装置,其中,
2.根据权利要求1所述的自主移动体的控制装置,其中,
3.根据权利要求1所述的自主移动体的控制装置,其中,
4.根据权利要求1所述的自主移动体的控制装置,其中,
5.根据权利要求1所述的自主移动体的控制装置,其中,
6.根据权利要求5所述的自主移动体的控制装置,其中,
7.根据权利要求5或6所述的自主移动体的控制装置,其中,
8.根据权利要求5或6所述的自主移动体的控制装置,其中,
9.一种自主移动体,其中,
技术总结
提供能够使自主移动体容易地乘入乘客输送机的梯级的自主移动体的控制装置。自主移动体的控制装置具备控制部,该控制部基于自主移动体的驱动轮或被驱动轮的转速的变化,检测所述自主移动体开始移动到乘客输送机的梯级的情况。根据该结构,控制装置基于自主移动体的驱动轮或被驱动轮的转速的变化,检测所述自主移动体开始移动至乘客输送机的梯级的情况。因此,能够使自主移动体容易地乘入乘客输送机的梯级。
技术研发人员:熊谷诚一,水野大辅,堀淳二
受保护的技术使用者:三菱电机楼宇解决方案株式会社
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!