一种数字变PI控制器的制作方法
一种数字变pi控制器
技术领域
1.本发明涉及自动控制领域,尤其涉及一种数字变pi控制器。
背景技术:
2.pi控制器具有优良的动态特性和稳态特性,广泛应用于电力电子领域的闭环控制。但是在性能要求较高的场合,单纯采用固定的pi控制器难以满足要求,由于数字控制器的灵活性,可以采用变pi控制器。常规的数字变pi控制器采用多级pi参数,这种方案一般能兼顾动态性和稳态性,但是在pi参数切换暂态,调节量会产生突变,从而使被控对象也产生较大的扰动。并且pi参数分级越少,切换瞬间产生的扰动就越大;pi参数分级越多,虽然会减小切换瞬间的扰动,但是分级多一方面控制器的设计相对复杂,另一方面分级多会导致每级之间的判断条件比较接近,可能引起误判断导致系统进一步发散。
技术实现要素:
3.有鉴于此,针对以上技术问题,本发明提供了一种数字变pi控制器。本发明。
4.本发明提供的一种数字变pi控制器,具体包括以下:变pi控制单元和pi控制器;所述变pi控制单元通过检测目标量与反馈量之间的偏差,将系统状态划分为稳态区间和动态区间;所述pi控制器根据当前系统状态,输出预设的pi参数。
5.进一步地,当检测目标量与反馈量之间的偏差超出预设的边界范围时,系统进入动态区间。
6.进一步地,当检测目标量与反馈量之间的偏差从动态区间反向过0时,系统进入稳态区间。
7.进一步地,当系统处于稳态区间时,所述pi控制器增益g
v
为1。
8.当系统处于动态区间时,所述pi控制器的增益g
v
为:其中k为变pi增益的斜率;u
border
为稳态区间的边界;u
error
为检测目标量与反馈量之间的偏差。
9.本发明提供的有益效果是:能够完全兼顾系统的动态性和稳态性,能够明显提升系统的性能。相比于现有技术,一方面由于稳态区间的设置,无需担心发散问题,所以可以在动态区间设置较大的pi参数来抑制被控对象的超调;另一方面从动态区间切换到稳态区间时调节量连续变化,所以被控对象不会发生扰动,调节过程更为平滑。
附图说明
10.图1是本发明一种数字变pi控制器的区间切换示意图;
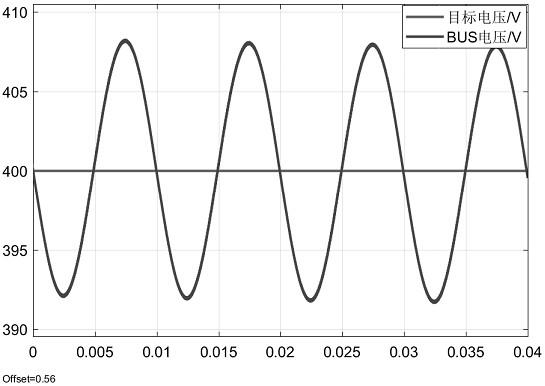
图2是单相pfc稳态时输出电压示意图;图3为突加满载时输出电压与变pi增益的对应关系图;图4是本发明一种数字变pi控制器的控制方法流程图。
具体实施方式
11.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明实施方式作进一步地描述。
12.一种数字变pi控制器,包括以下:变pi控制单元和pi控制器;所述变pi控制单元通过检测目标量与反馈量之间的偏差,将系统状态划分为稳态区间和动态区间;所述pi控制器根据当前系统状态,输出预设的pi参数。
13.请参考图1,图1是数字变pi控制器区间切换示意图;当检测目标量与反馈量之间的偏差超出预设的边界范围时,系统进入动态区间。
14.当检测目标量与反馈量之间的偏差从动态区间反向过0时,系统进入稳态区间。
15.处于稳态区间,采用较小的pi参数以满足系统的稳态性能,比如输出电压纹波。动态区间,采用较大的pi参数以满足系统的动态性能,比如输出电压超调。
16.下面,本申请以单相pfc为例,对本申请的内容进一步解释说明;请参考图2,图2是单相pfc稳态时输出电压示意图;图2中,目标电压为水平直线;bus电压为含交流分量的正弦曲线;单相pfc由于其输出电容由于体积和成本的限制容量不可能无限大,所以稳态时输出电压存在一定的纹波。为了避免电压环引入较大的3次谐波到电流环,电压环的带宽一般设计较小,而为了保证系统的动态性,电压环的带宽需要设计较大,为了解决以上矛盾,可采用变pi控制器。
17.为了保证动态时的电流波形质量,稳态区间的边界u
border
必须大于δu
bus
,并留一定的裕量,稳态区间中变pi增益g
v
为1。
18.动态区间中,变pi增益由系统的动态要求决定,g
v
由以下公式计算得到:其中u
error
为电压环的偏差,k和b分别为变pi增益的斜率和截距。
19.为了保证pi参数变化的连续性,在稳态区间的边界u
border
处对应g
v
为1,由此计算得到:结合上面两式计算得到:实际中可根据系统对动态响应的要求调节k值即可。
20.k值越大,系统的动态响应速度越快,u
border
越大,系统的稳定性越好。请参考图3,图3为突加满载时输出电压与变pi增益的对应关系图,图3中,最上面的波形图,目标电压为
水平直线,bus电压为曲线;当输出电压跌落时,变pi增益g
v
迅速增大并快速抑制输出电压的进一步跌落。
21.请参考图4,图4是本发明一种数字变pi控制器的控制方法流程图;控制开始后,变pi控制单元获取目标量与反馈量之间的偏差,若偏差超过设定窗口,则系统切换到动态区间,根据动态区间变pi的公式计算出g
v
参数;若偏差反向过零,则系统切换到稳态区间,强制g
v
等于1。变pi控制单元输出的变增益g
v
用于修正pi控制器的比例和积分参数,然后执行pi运算,最终计算得到被控对象的调节量。
22.本发明的有益效果是:能够完全兼顾系统的动态性和稳态性,能够明显提升系统的性能。相比于现有技术,一方面由于稳态区间的设置,无需担心发散问题,所以可以在动态区间设置较大的pi参数来抑制被控对象的超调;另一方面从动态区间切换到稳态区间时调节量连续变化,所以被控对象不会发生扰动,调节过程更为平滑。
23.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
技术特征:
1.一种数字变pi控制器,其特征在于:包括:变pi控制单元和pi控制器;所述变pi控制单元通过检测目标量与反馈量之间的偏差,将系统状态划分为稳态区间和动态区间;所述pi控制器根据当前系统状态,输出预设的pi参数。2.如权利要求1所述的一种数字变pi控制器,其特征在于:系统从稳态区间切换到动态区间的判断条件为:当检测目标量与反馈量之间的偏差超出预设的边界范围时,系统进入动态区间。3.如权利要求1所述的一种数字变pi控制器,其特征在于:系统从动态区间切换到稳态区间的判断条件为:当检测目标量与反馈量之间的偏差从动态区间反向过0时,系统进入稳态区间。4.如权利要求1所述的一种数字变pi控制器,其特征在于:当系统处于稳态区间时,所述pi控制器增益g
v
为1。5.如权利要求1所述的一种数字变pi控制器,其特征在于:当系统处于动态区间时,所述pi控制器的增益g
v
为:其中k为变pi增益的斜率;u
border
为稳态区间的边界;u
error
为检测目标量与反馈量之间的偏差。
技术总结
本发明提供了一种数字变PI控制器,包括:变PI控制单元和PI控制器;所述变PI控制单元通过检测目标量与反馈量之间的偏差,将系统状态划分为稳态区间和动态区间;所述PI控制器根据当前系统状态,输出预设的PI参数。本发明能够完全兼顾系统的动态性和稳态性,明显提升系统的性能。相比于现有技术,一方面由于稳态区间的设置,无需担心发散问题,所以可以在动态区间设置较大的PI参数来抑制被控对象的超调;另一方面从动态区间切换到稳态区间时调节量连续变化,所以被控对象不会发生扰动,动态调节过程更为平滑。过程更为平滑。过程更为平滑。
技术研发人员:李武杰 潘冬华 金浩 黎先葵 姚川
受保护的技术使用者:武汉华海通用电气有限公司
技术研发日:2021.04.29
技术公布日:2021/9/6
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1