一种无人机的定位方法及装置与流程
本说明书涉及无人驾驶领域,尤其涉及一种无人机的定位方法及装置。
背景技术:
1、随着物联网的发展,无人机对物联网技术的应用不断增加,无人机已经广泛应用到气象监测、快递运送、遥感航拍、环境保护等领域,为了更好的控制无人机的飞行高度,需要惯性测量单元、气压计、视觉里程计等传感器提供飞行数据,而飞行时间(time offlight,tof)传感器由于其测量精度高,稳定性强,测量距离远等特点,被广泛应用于无人机技术。
2、但是在无人机飞行过程中,tof传感器容易受到地形地貌的影响,导致高度测量值出现跳变。无人机卫星导航失效的飞行过程中,特别是悬停状态下,tof传感器的跳变容易拉偏甚至破坏整个多源传感器的高度融合结果,引起高度通道的控制不稳定,甚至导致飞行事故。
3、所以,如何能够确保无人机在卫星导航失效的悬停状态下定位的精准度,避免飞行事故的发生,则是一个亟待解决的问题。
技术实现思路
1、本说明书提供一种无人机的定位方法及装置,以部分的解决现有技术存在的上述问题。
2、本说明书采用下述技术方案:
3、本说明书提供了一种无人机的定位方法及装置,所述方法应用于执行无人配送业务,包括:
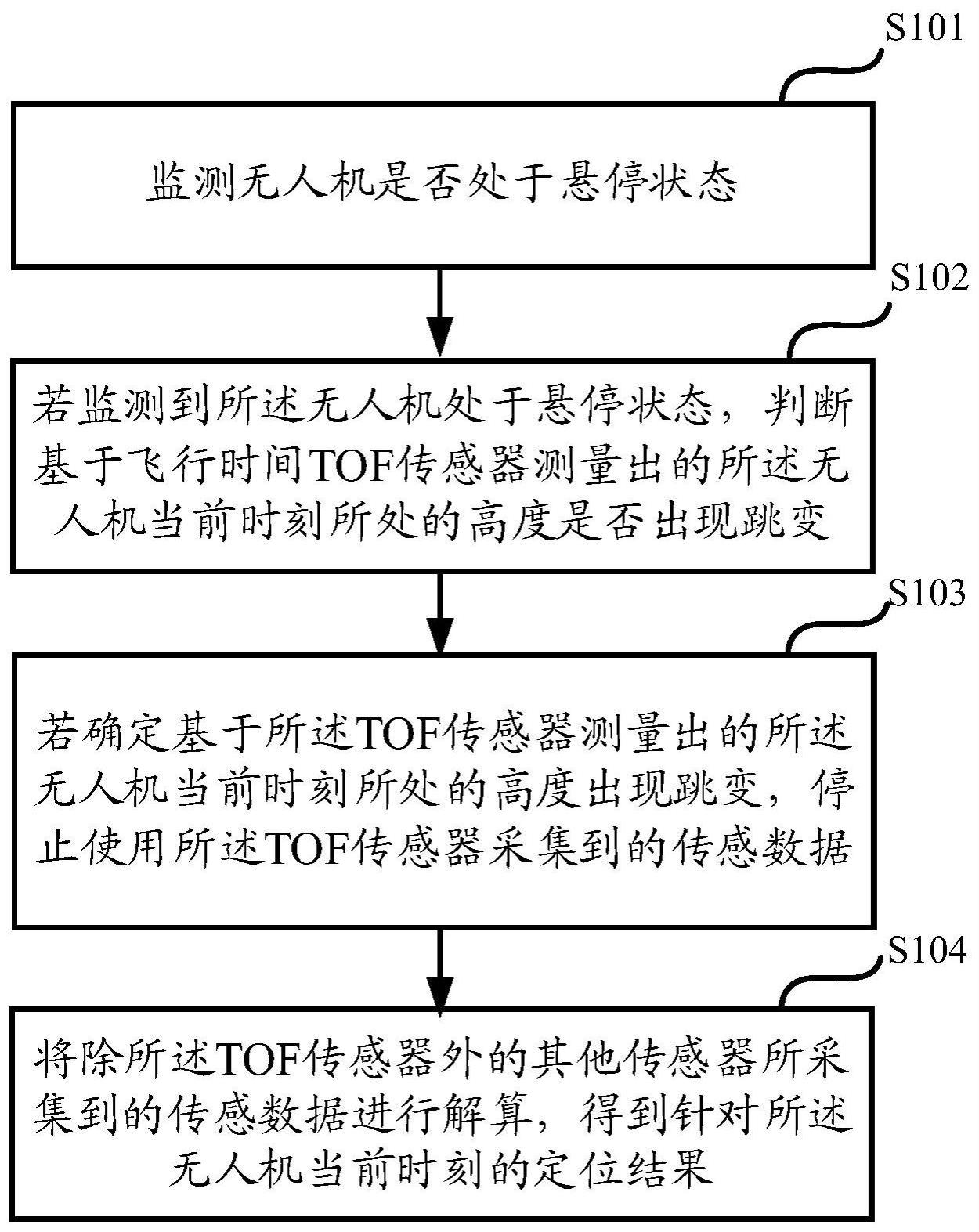
4、监测无人机是否处于悬停状态;
5、若监测到所述无人机处于悬停状态,判断基于飞行时间tof传感器测量出的所述无人机当前时刻所处的高度是否出现跳变,其中,若基于所述tof传感器测量出的所述无人机在上一时刻所处的高度,与基于所述tof传感器测量出的所述无人机当前时刻所处的高度之间的差异超过设定差异,确定基于所述tof传感器测量出的所述无人机当前时刻所处的高度出现跳变;
6、若确定基于所述tof传感器测量出的所述无人机当前时刻所处的高度出现跳变,停止使用所述tof传感器采集到的传感数据;
7、将除所述tof传感器外的其他传感器所采集到的传感数据进行解算,得到针对所述无人机当前时刻的定位结果。
8、可选地,监测无人机是否处于悬停状态,具体包括:
9、根据确定出的所述无人机的飞行状态,和/或所述无人机获取到的飞行控制指令,监测所述无人机是否处于悬停状态,其中,所述飞行状态包括:空间位置状态、速度状态中的至少一种,所述飞行控制指令包括:速度指令、定点指令中的至少一种。
10、可选地,根据确定出的所述无人机的飞行状态,监测所述无人机是否处于悬停状态,具体包括:
11、若根据所述空间位置状态,确定所述无人机上一时刻在三维空间中所处的水平位置,与所述无人机当前时刻在三维空间中所处的水平位置之间的偏差小于预设偏差,确定所述无人机处于悬停状态;
12、和/或
13、若根据所述速度状态,确定所述无人机当前时刻的速度小于预设速度阈值,确定所述无人机处于悬停状态。
14、可选地,根据所述无人机的飞行控制指令,监测所述无人机是否处于悬停状态,具体包括:
15、若所述无人机接收到所述定点指令,确定所述无人机处于悬停状态;
16、和/或
17、若根据所述无人机接收到的所述速度指令,确定所述无人机停止移动,确定所述无人机处于悬停状态。
18、可选地,若监测到所述无人机处于悬停状态,判断基于飞行时间tof传感器测量出的所述无人机当前时刻所处的高度是否出现跳变,具体包括:
19、确定通过所述tof传感器测量出的所述无人机当前时刻所处的高度,与通过所述tof传感器测量出的所述无人机上一时刻所处的高度之间的高度差异;
20、根据所述高度差异,确定所述无人机在单位时间内的差分速度,作为当前时刻对应的差分速度,即单位时间所述无人机高度的变化量;
21、根据所述当前时刻对应的差分速度,以及在所述当前时刻之前,且包含有上一时刻的连续若干时刻对应的差分速度,构建差分速度序列;
22、通过预设的滤波器,滤除差分速度序列中的噪声,得到滤波后的差分速度序列;
23、若在所述滤波后的差分速度序列中确定所述当前时刻对应的差分速度大于预设差分速度阈值,确定基于所述tof传感器测量出的所述无人机当前时刻所处的高度出现跳变。
24、可选地,所述方法还包括:
25、若所述无人机处于非悬停状态,将所述tof传感器采集到的传感数据与所述其他传感器采集到的传感数据进行解算,得到所述无人机当前时刻的定位结果。
26、可选地,所述方法还包括:
27、若基于所述tof传感器测量出的所述无人机当前时刻所处的高度未出现跳变,将所述tof传感器采集到的传感数据与所述其他传感器采集到的传感数据进行解算,得到所述无人机当前时刻的定位结果。
28、本说明书提供了一种无人机的定位装置,所述装置应用于执行无人配送业务,包括:
29、监测模块,用于监测无人机是否处于悬停状态;
30、判断模块,用于若监测到所述无人机处于悬停状态,判断基于飞行时间tof传感器测量出的所述无人机当前时刻所处的高度是否出现跳变,其中,若基于所述tof传感器测量出的所述无人机在上一时刻所处的高度,与基于所述tof传感器测量出的所述无人机当前时刻所处的高度之间的差异超过设定差异,确定基于所述tof传感器测量出的所述无人机当前时刻所处的高度出现跳变;
31、停止模块,用于若确定基于所述tof传感器测量出的所述无人机当前时刻所处的高度出现跳变,停止使用所述tof传感器采集到的传感数据;
32、定位模块,用于将除所述tof传感器外的其他传感器所采集到的传感数据进行解算,得到针对所述无人机当前时刻的定位结果。
33、本说明书提供了一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述无人机的定位方法。
34、本说明书提供了一种无人机,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述无人机的定位方法。
35、本说明书采用的上述至少一个技术方案能够达到以下有益效果:
36、在本说明书提供无人机定位方法中,实时对无人机是否处于悬停状态进行监测,若监测到无人机处于悬停状态,判断基于tof传感器测量出的无人机在当前时刻所处的高度是否出现跳变,若确定基于tof传感器测量出的无人机当前时刻所处的高度出现跳变,停止使用tof传感器采集到的传感数据,将除tof传感器外的其他传感器所采集到的传感数据进行解算,得到针对无人机当前时刻的定位结果。
37、从上述方法中可以看出,无人机处于悬停状态下时,一旦确定出基于tof传感器所测量出的无人机当前时刻所处的高度出现跳变,则可停止使用tof传感器所采集到的传感数据,降低了在产生跳变时tof传感器对最终解算得到的无人机的高度的不利影响,提高了无人机定位的准确性,以及保证了无人机的飞行安全。
技术特征:
1.一种无人机的定位方法,其特征在于,所述方法应用于无人配送领域,包括:
2.如权利要求1所述的方法,其特征在于,监测无人机是否处于悬停状态,具体包括:
3.如权利要求2所述的方法,其特征在于,根据确定出的所述无人机的飞行状态,监测所述无人机是否处于悬停状态,具体包括:
4.如权利要求2所述的方法,其特征在于,根据所述无人机的飞行控制指令,监测所述无人机是否处于悬停状态,具体包括:
5.如权利要求1所述的方法,其特征在于,若监测到所述无人机处于悬停状态,判断基于飞行时间tof传感器测量出的所述无人机当前时刻所处的高度是否出现跳变,具体包括:
6.如权利要求1所述的方法,其特征在于,所述方法还包括:
7.如权利要求1所述的方法,其特征在于,所述方法还包括:
8.一种无人机的定位装置,其特征在于,所述装置应用于无人配送领域,包括:
9.一种计算机可读存储介质,其特征在于,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述权利要求1~7任一项所述的方法。
10.一种无人机,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现上述权利要求1~7任一项所述的方法。
技术总结
本说明书公开了一种无人机的定位方法及装置。该无人机的定位方法包括:监测无人机是否处于悬停状态,若监测到无人机处于悬停状态,判断基于飞行时间TOF传感器测量出的无人机当前时刻所处的高度是否出现跳变,若确定基于TOF传感器测量出的所述无人机当前时刻所处的高度出现跳变,停止使用TOF传感器采集到的传感数据,将除TOF传感器外的其他传感器所采集到的传感数据进行解算,得到针对无人机当前时刻的定位结果。可见本申请可提高无人机悬停状态下的定位精度,确保无人机的飞行安全。
技术研发人员:姚贺
受保护的技术使用者:北京三快在线科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!