一种用于精密运动控制的驱动控制系统的制作方法
本发明属于自动控制,特别是涉及在需实现精密运动控制时,通过计算机连接驱动控制装置发送串口指令,实现高精度三维方向的运动控制。
背景技术:
1、在自动控制及精密运动的技术领域,步进电机充当着非常重要的角色。目前比较成熟的步进电机驱动控制技术大多采用单片机搭配驱动电路、控制芯片及其外围电路的方式,但是该种设计方式比较固化,出现问题不易排查,而且这种设计方式很难实现电机“启动—加速”和“减速—停止”的过程,这个问题在精密运动控制中具有很大弊端。
技术实现思路
1、本发明的目的是针对现有驱动控制装置设计固化,不易改动的问题,提出一种既能支持rs232串口通信又能支持usb通信的具有高精度特点的精密运动驱动控制系统,基于便携式小型模块通过精细化运动指令的方式,通过软硬件协同设计开发取得预期效果。
2、本发明的技术方案如下:
3、一种用于精密运动控制的驱动控制系统,其特征在于:包括驱动控制硬件装置和人机交互软件界面,其中:
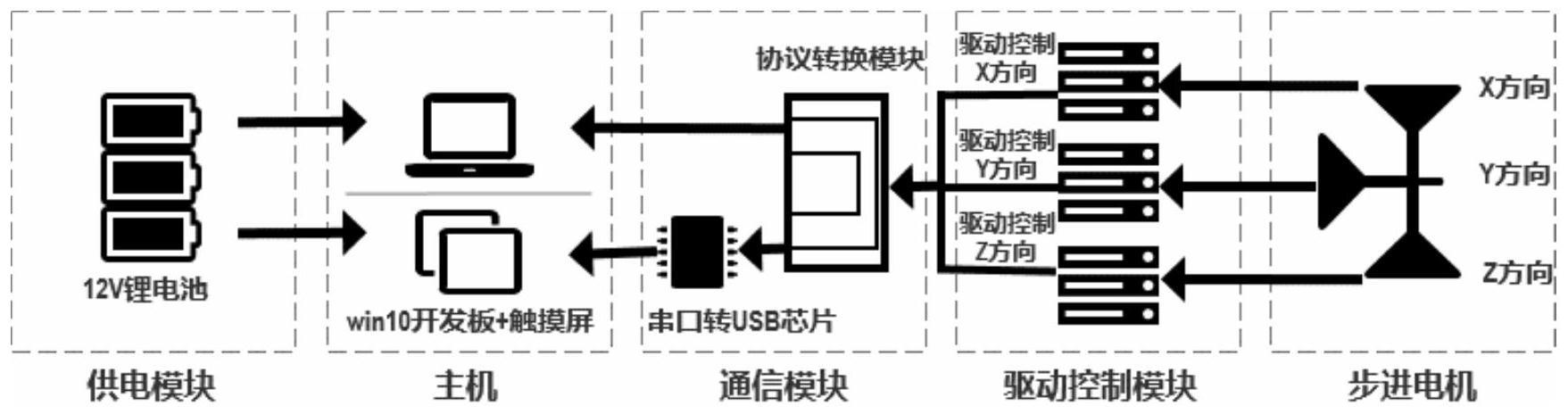
4、所述驱动控制硬件装置包括主机、供电模块、驱动控制模块、通信模块、步进电机;所述主机包含小型工控机和win10开发板+触摸屏两种方式,完成与通信模块之间实现参数配置、数据收发、数据解析、软件控制、程序运行;所述供电模块完成主机、通信模块、驱动控制模块、步进电机的电源供应;通信模块完成can总线到rs232串口通信协议的转换,进一步的通过rs232转usb协议转换芯片完成协议转换;所述驱动控制模块完成与步进电机的地址及运动参数的指令配置,完成指令与运动状态向通信模块的传达;所述步进电机完成运动控制指令的执行以及运动状态的信息反馈;
5、所述人机交互界面包含设备串口连接、串口参数配置、指令发送与指令解析、三维运动控制触发、回到运动起点一键触发;所述设备串口连接完成软件对于硬件设备的串口号选择;所述串口参数配置完成串口波特率、数据位、停止位、奇偶校验位的配置;所述指令发送与指令解析完成步进电机运动指令的发送和步进电机通过驱动控制模块返回运动状态信息指令的接收并解析;所述三维运动控制触发完成用户通过上位机来对三维运动步进电机的运动控制;所述回到运动起点一键触发完成三维运动步进电机返回到初始位置。
6、本发明采用便携式、小型化硬件方案设计,结合驱动控制协议进行数据发送及接收,能够通过上位机软件实现步进电机的精密运动控制。本发明还打包成二次开发包,将应用扩展至其他领域,提高发明的适用性和通用性。
技术特征:
1.一种用于精密运动控制的驱动控制系统,其特征在于:包括驱动控制硬件装置和人机交互软件界面,其中:
技术总结
本发明涉及一种用于精密运动控制的驱动控制系统,包括驱动控制硬件装置和人机交互软件界面,其中所述驱动控制硬件装置包括主机、供电模块、驱动控制模块、通信模块、步进电机,所述人机交互界面包含设备串口连接、串口参数配置、指令发送与指令解析、三维运动控制触发、回到运动起点一键触发。本发明采用便携式、小型化硬件方案设计,结合驱动控制协议进行数据发送及接收,能够通过上位机软件实现步进电机的精密运动控制。
技术研发人员:何璐璐,海文涛,马英红,常玉文
受保护的技术使用者:北京航天长峰科技工业集团有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!