避障性能的检测方法、装置、设备和存储介质与流程
本发明涉及机器人,尤其涉及一种避障性能的检测方法、装置、设备和存储介质。
背景技术:
1、当机器人生成完毕后,需要对机器人的避障性能进行检测。然而,现有的避障性能检测方式需要耗费较多的人力,无法实现对机器人避障性能的快速检测。
技术实现思路
1、有鉴于此,本发明实施例提供一种避障性能的检测方法、装置、设备和存储介质,以实现机器人避障性能的自动化检测。
2、第一方面,本发明实施例提供了一种避障性能的检测方法,包括:
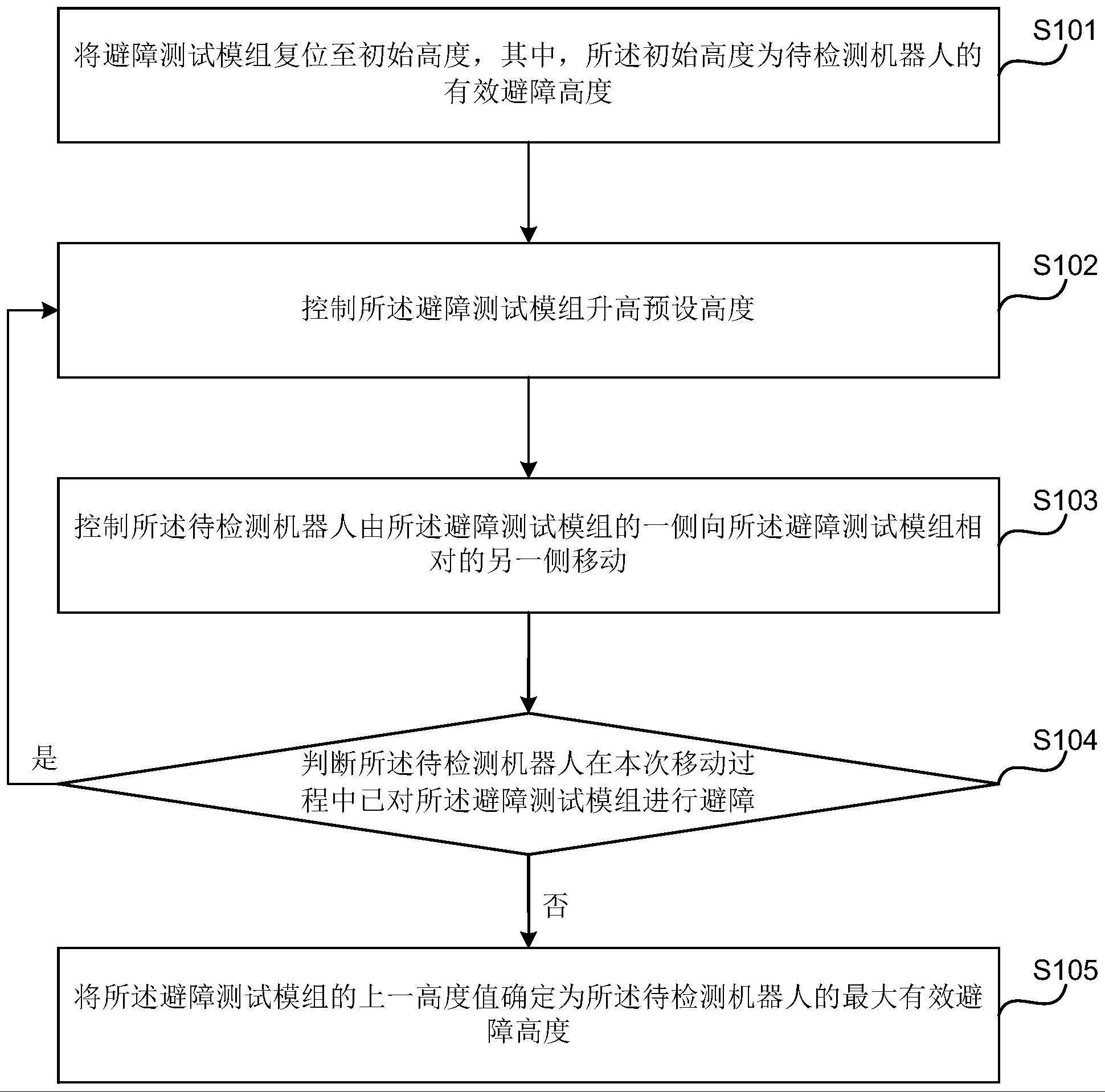
3、将避障测试模组复位至初始高度,其中,所述初始高度为待检测机器人的有效避障高度;
4、控制所述避障测试模组升高预设高度;
5、控制所述待检测机器人由所述避障测试模组的一侧向所述避障测试模组相对的另一侧移动;
6、如果所述待检测机器人在本次移动过程中已对所述避障测试模组进行避障,则返回执行控制所述避障测试模组升高预设高度的操作;
7、否则,则将所述避障测试模组的上一高度值确定为所述待检测机器人的最大有效避障高度。
8、第二方面,本发明实施例提供了一种避障性能的检测装置,包括:
9、第一复位模块,用于将避障测试模组复位至初始高度,其中,所述初始高度为待检测机器人的有效避障高度;
10、第一模组控制模块,用于控制所述避障测试模组升高预设高度;
11、第一移动控制模块,用于控制所述待检测机器人由所述避障测试模组的一侧向所述避障测试模组相对的另一侧移动;
12、第一高度确定模块,用于如果所述待检测机器人在本次移动过程中已对所述避障测试模组进行避障,则返回所述第一模组控制模块;否则,则将所述避障测试模组的上一高度值确定为所述待检测机器人的最大有效避障高度。
13、第三方面,本发明实施例提供了一种避障性能的检测设备,包括:
14、一个或多个处理器;
15、存储器,用于存储一个或多个程序,
16、当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如本发明实施例所述的避障性能的检测方法。
17、第四方面,本发明实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如本发明实施例所述的避障性能的检测方法。
18、本发明实施例提供的避障性能的检测方法、装置、设备和存储介质,将避障测试模组复位至初始高度,其中,该初始高度为待检测机器人的有效避障高度;控制避障测试模组升高预设高度;控制待检测机器人由该避障测试模组的一侧向该避障测试模组相对的另一侧移动;如果待检测机器人在本次移动过程中已对该避障测试模组进行避障,则返回执行上述控制避障测试模组升高预设高度的操作;如果待检测机器人在本次移动过程中未对该避障测试模组进行避障,则将该避障测试模组的上一高度确定为待检测机器人的最大有效避障高度。本发明实施例通过采用上述技术方案,通过测试设备对避障测试模组和待检测机器人进行控制,与避障测试模组和待检测机器人交替联动,能够实现对待检测机器人的最大有效避障高度的自动化检测,提高避障性能的测试效率与测试精度。
技术特征:
1.一种避障性能的检测方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述控制所述待检测机器人由所述避障测试模组的一侧向所述避障测试模组相对的另一侧移动,包括:
3.根据权利要求2所述的方法,其特征在于,在所述控制所述待检测机器人由所述避障测试模组的一侧向所述避障测试模组相对的另一侧移动之后,还包括:
4.根据权利要求1-3任一所述的方法,其特征在于,在所述将所述避障测试模组的上一高度值确定为所述待检测机器人的最大有效避障高度之后,还包括:
5.根据权利要求4所述的方法,其特征在于,所述如果所述待检测机器人在本次移动过程中已对所述避障测试模组进行避障,则返回执行控制所述避障测试模组降低预设高度的操作,包括:
6.根据权利要求5所述的方法,其特征在于,还包括:
7.一种避障性能的检测装置,其特征在于,包括:
8.根据权利要求7所述的装置,其特征在于,还包括:
9.一种避障性能的检测设备,其特征在于,包括:
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-6中任一所述的避障性能的检测方法。
技术总结
本发明实施例公开了一种避障性能的检测方法、装置、设备和存储介质。该方法包括:将避障测试模组复位至初始高度,其中,所述初始高度为待检测机器人的有效避障高度;控制所述避障测试模组升高预设高度;控制所述待检测机器人由所述避障测试模组的一侧向所述避障测试模组相对的另一侧移动;如果所述待检测机器人在本次移动过程中已对所述避障测试模组进行避障,则返回执行控制所述避障测试模组升高预设高度的操作;否则,则将所述避障测试模组的上一高度值确定为所述待检测机器人的最大有效避障高度。本发明实施例通过采用上述技术方案,能够实现对待检测机器人的最大有效避障高度的自动化检测。
技术研发人员:崔鹏
受保护的技术使用者:浙江欣奕华智能科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!