一种纯电动矿车的无人驾驶整车控制方法与流程
1.本发明涉及一种用于纯电动矿车的无人驾驶整车控制方法,主要应用于大型纯电动矿用自卸车。
背景技术:
2.人类的生存需要物质,甚至在经济时代仍然离不开物质而生存。因此,采矿工业将来仍然是全球经济持续发展的基础。21世纪的矿业目标是开拓先进的采矿技术,吸收各学科的高新技术,创建一个更高效,更低成本、环境污染更小的和具有安全生产条件的矿山,以满足日益增长世界人口生活质量需求,促进社会经济可持续发展。
3.具有无人驾驶功能的矿用自卸车的使用,在大型露天矿中愈发普遍,国内各大露天矿也已开始步入大型矿卡纯电动化探索之路。
技术实现要素:
4.本发明的目的在于提供一种纯电动矿车的无人驾驶整车控制方法。
5.本发明的技术方案为:
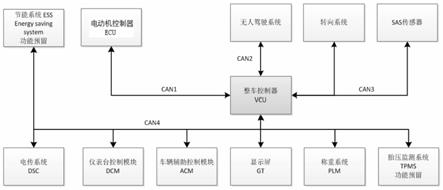
6.一种纯电动矿车的无人驾驶整车控制方法,以整车控制器作为核心器件,所述整车控制器与仪表台控制模块(dcm)、车辆辅助控制模块(acm)、电动机控制器(ecu)、转向系统、电传系统(dsc)分别连接构建车辆控制核心,实现车辆牵引、制动、转向、车厢起升、灯光控制等功能;所述整车控制器与无人驾驶系统互相连接控制,所述整车控制器还分别连接称重系统(plm)、显示屏 (gt)、胎压监测系统(tpms)、sas传感器、节能系统(ess),有人驾驶与无人驾驶的切换逻辑为核心部分,具体的控制方法如下:
7.步骤1:无人驾驶开关置上升沿,检测无人驾驶标志位,若标志位为0,进入步骤2;若标志位为1,进入步骤3;
8.步骤2:控制器报警:对无人驾驶按钮进行初始化,继续保持人工驾驶模式;
9.步骤3:与无人驾驶模块进行通讯连接,若连接失败,进入步骤4;若连接成功,进入步骤5;
10.步骤4:控制器进行自动紧急制动,并报警:自动紧急制动和can2通讯错误,当车速降至2km/h以下时,施加驻车制动,待驻车制动施加成功,转入人工驾驶模式,无人驾驶标志位置零;
11.步骤5:控制器向无人驾驶模块发送无人驾驶开启指令,若控制器接收到无人驾驶模块发回的无人驾驶开启指令,进入步骤6;否则进入步骤7;
12.步骤6:进入无人驾驶状态;
13.步骤7:进入人工驾驶状态,报警:无人驾驶功能失效,无人驾驶标志位置零;
14.步骤8:无人驾驶开关置下降沿,检测车辆状态,若处于无人驾驶状态,进入步骤9;若处于人工驾驶状态,进入步骤10;
15.步骤9:与无人驾驶模块进行通讯连接,若连接失败,进入步骤4;若连接成功,进入
步骤10;
16.步骤10:施加驻车制动,驻车制动施加成功后进入人工驾驶状态。
17.本发明实现的主要功能包括:实现整车的逻辑控制,并以模拟信号或数字信号控制电传系统;采用模拟信号控制车辆的前、后桥制动比例电磁阀,实现车辆液压制动线控化;使用数字信号实现车辆的转向控制,实现转向系统线控化;接收并辨识整车状态信号,进行车辆状态判断和车辆故障诊断;将车辆运行信息并实时反馈到人机界面、无人驾驶系统和远程监控平台。
18.本发明的有益效果在于:
19.本发明无人驾驶的纯电动矿用自卸车的使用的能源全是电能,不会排放有害气体与温室气体,减少污染,更为清洁高效;同时无人驾驶与有人驾驶功能能够灵活切换,不仅可以解放驾驶员,提高工作效率,而且能够双保险,使交通更加安全。
附图说明
20.图1是车辆控制核心通讯架构图。
21.图2是本发明的无人驾驶与人工驾驶切换逻辑图。
具体实施方式
22.下面结合附图和具体实施例对本发明做进一步详细说明,但本发明并不限于此。
23.实施例1
24.一种纯电动矿车的无人驾驶整车控制方法,以整车控制器作为核心器件,所述整车控制器分别与仪表台控制模块(dcm)、车辆辅助控制模块(acm)、电动机控制器(ecu)、转向系统、电传系统(dsc)、称重系统(plm)、显示屏(gt)、 sas传感器连接,实现车辆牵引、制动、转向、车厢起升、灯光控制等功能;所述整车控制器与无人驾驶系统互相连接控制,有人驾驶与无人驾驶的切换逻辑为核心部分,具体的控制方法如下:
25.步骤1:无人驾驶开关置上升沿,检测无人驾驶标志位,若标志位为0,进入步骤2;若标志位为1,进入步骤3;
26.步骤2:控制器报警:对无人驾驶按钮进行初始化,继续保持人工驾驶模式;
27.步骤3:与无人驾驶模块进行通讯连接,若连接失败,进入步骤4;若连接成功,进入步骤5;
28.步骤4:控制器进行自动紧急制动,并报警:自动紧急制动和can2通讯错误,当车速降至2km/h时,施加驻车制动,待驻车制动施加成功,转入人工驾驶模式,无人驾驶标志位置零;
29.步骤5:控制器向无人驾驶模块发送无人驾驶开启指令,若控制器接收到无人驾驶模块发回的无人驾驶开启指令,进入步骤6;否则进入步骤7;
30.步骤6:进入无人驾驶状态;
31.步骤7:进入人工驾驶状态,报警:无人驾驶功能失效,无人驾驶标志位置零;
32.步骤8:无人驾驶开关置下降沿,检测车辆状态,若处于无人驾驶状态,进入步骤9;若处于人工驾驶状态,进入步骤10;
33.步骤9:与无人驾驶模块进行通讯连接,若连接失败,进入步骤4;若连接成功,进入
步骤10;
34.步骤10:施加驻车制动,驻车制动施加成功后进入人工驾驶状态。
35.实施例2
36.其余同实施例1,不同的是:整车控制器还同时连接节能系统(ess)和胎压监测系统(tpms)。
技术特征:
1.一种纯电动矿车的无人驾驶整车控制方法,其特征在于,以整车控制器作为核心器件,所述整车控制器分别连接仪表台控制模块、车辆辅助控制模块、电动机控制器、转向系统、电传系统、称重系统、显示屏、sas传感器、节能系统,所述控制方法的核心为有人驾驶与无人驾驶的切换逻辑,具体如下:步骤1:无人驾驶开关置上升沿,检测无人驾驶标志位,若标志位为0,进入步骤2;若标志位为1,进入步骤3;步骤2:控制器报警:对无人驾驶按钮进行初始化,继续保持人工驾驶模式;步骤3:与无人驾驶模块进行通讯连接,若连接失败,进入步骤4;若连接成功,进入步骤5;步骤4:控制器进行自动紧急制动,并报警:自动紧急制动和can2通讯错误,当车速降至2km/h以下时,施加驻车制动,待驻车制动施加成功,转入人工驾驶模式,无人驾驶标志位置零;步骤5:控制器向无人驾驶模块发送无人驾驶开启指令,若控制器接收到无人驾驶模块发回的无人驾驶开启指令,进入步骤6;否则进入步骤7;步骤6:进入无人驾驶状态;步骤7:进入人工驾驶状态,报警:无人驾驶功能失效,无人驾驶标志位置零;步骤8:无人驾驶开关置下降沿,检测车辆状态,若处于无人驾驶状态,进入步骤9;若处于人工驾驶状态,进入步骤10;步骤9:与无人驾驶模块进行通讯连接,若连接失败,进入步骤4;若连接成功,进入步骤10;步骤10:施加驻车制动,驻车制动施加成功后进入人工驾驶状态。2.根据权利要求1所述的纯电动矿车的无人驾驶整车控制方法,其特征在于,所述整车控制器还同时连接节能系统和胎压监测系统。
技术总结
本发明公开一种纯电动矿车的无人驾驶整车控制方法。以整车控制器作为核心器件,所述整车控制器与仪表台控制模块、车辆辅助控制模块、电动机控制器、转向系统、电传系统分别连接构建车辆控制核心,实现车辆牵引、制动、转向、车厢起升、灯光控制等功能;所述控制方法的核心为有人驾驶与无人驾驶的切换逻辑。本发明无人驾驶的纯电动矿用自卸车的使用的能源全是电能,不会排放有害气体与温室气体,减少污染,更为清洁高效;同时无人驾驶与有人驾驶功能能够灵活切换,不仅可以解放驾驶员,提高工作效率,而且能够双保险,使交通更加安全。使交通更加安全。使交通更加安全。
技术研发人员:敖琢 夏云清 龙梦晓 陈磁 张晓强
受保护的技术使用者:湘潭电机股份有限公司
技术研发日:2021.12.13
技术公布日:2022/5/25
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1