一种群舞机器人跌倒起身并同步动作的方法与流程
1.本发明涉及机器人技术领域,更具体地说是一种群舞机器人跌倒起身并同步动作的方法。
2.
背景技术:
3.群舞机器人是智能机器人领域的一个分支,一组群舞机器人由若干个人形机器人组成,每个人形机器人包含头部、肩部、肘部、腿部、膝盖、脚踝等可动关节,每个关节由一个伺服舵机驱动。一组群舞机器人表演时,主控制台的无线发射器发出启动指令,群组中的每台人形机器人收到指令后,执行预先编写好的舞蹈动作。
4.理想情况下,一组群舞机器人中每台人形机器人的动作都是同步的,然而由于表演场地会出现局部不平整、地毯较软等情况,导致个别机器人会在舞蹈过程中跌倒。多数群舞机器人并未考虑舞蹈中跌倒的情况,机器人跌倒后仍然在跌倒姿态执行预设的舞蹈动作,导致整体舞蹈的整齐性被破坏。即使有的群舞机器人可以在跌倒后执行起身动作,但是之后无法与其他机器人的舞蹈动作同步,影响观众的观看体验。
技术实现要素:
5.为了克服现有技术中的上述问题,本发明的目的在于提供一种群舞机器人跌倒起身并同步动作的方法。机器人在舞蹈过程中可以检测自身跌倒,跌倒后停止当前舞蹈动作,执行起身动作,起身后可以自动同步其他机器人的舞蹈动作,保证了后续舞蹈的整齐性。
6.本发明提供了一种群舞机器人跌倒起身并同步动作的方法,具体内容如下:一组群舞机器人由若干人形机器人组成,每个人形机器人包含若干由舵机驱动的可动关节;所述人形机器人内部设置有主控制器、无线收发模块、姿态传感器、存储单元;所述人形机器人的主控制器与所述舵机之间通过串行总线接口进行连接;所述人形机器人的存储单元中保存着预先编写好的若干舞蹈动作组;每个舞蹈动作组由若干动作帧构成;每个动作帧包含每个可动关节舵机的目标位置以及运动时间;所述人形机器人的主控制器中运行着多任务系统,主要任务包括无线收发任务、姿态检测任务、舞蹈任务、跌倒起身任务等;所述人形机器人的无线收发任务收到启动指令后,通知舞蹈任务;舞蹈任务从存储单元中读取对应的舞蹈动作组,从动作组中解析第一帧动作数据,然后通过串行总线接口1向每个可动关节舵机发送相应的目标位置和运动时间,之后延时与运动时间相同的时间,再解析第二帧数据发送给舵机并延时,直到最后一帧;所述姿态检测任务检测到机器人跌倒时,通知舞蹈任务和跌倒起身任务;舞蹈任务仍然按原来的顺序执行动作数据的读取和解析,但是并不通过与舵机连接的串行总线接口1发送给舵机,而是将数据发送给一个空闲的串行总线接口2;跌倒起身任务从存储单元中读取跌倒起身动作组,从动作组中逐帧解析动作数据并通过串行总线接口1发送给舵机,
直到跌倒起身动作执行完毕;所述跌倒起身任务执行完跌倒起身动作后,通知舞蹈任务;舞蹈任务仍然按原来的顺序执行动作数据的读取和解析,但不再将数据发送给空闲的串行总线接口2,而是通过与舵机连接的串行总线接口1发送给舵机,直到整个舞蹈结束;本发明一种群舞机器人跌倒起身并同步动作的方法的有益效果为:(1)机器人舞蹈过程中跌倒后可以执行起身动作自行站起,不需要人为干预;(2)机器人跌倒起身后可以与其他机器人的动作同步,保证了群舞表演的整齐性。
附图说明
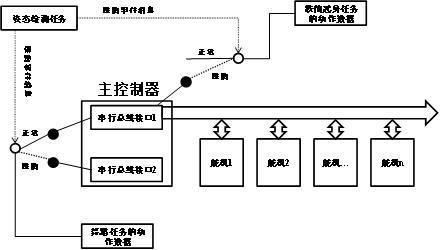
7.图1为本发明一种群舞机器人跌倒起身并同步动作的方法的的示意图;
具体实施方式
8.以下将结合附图对本发明进行详细说明。
9.具体实施方式一一组群舞机器人由若干人形机器人组成,每个人形机器人包含若干由舵机驱动的可动关节;所述人形机器人内部设置有主控制器、无线收发模块、姿态传感器、存储单元;如图1所示,所述人形机器人的主控制器与所述舵机之间通过串行总线接口1进行连接;主控制器中的串行总线接口2未连接任何外部设备;所述人形机器人的存储单元中保存着预先编写好的若干舞蹈动作组;每个舞蹈动作组由若干动作帧构成;每个动作帧包含每个可动关节舵机的目标位置以及运动时间;所述人形机器人的主控制器中运行着多任务系统,主要任务包括无线收发任务、姿态检测任务、舞蹈任务、跌倒起身任务等;所述人形机器人的无线收发任务收到启动指令后,通知舞蹈任务;如图1所示,在姿态检测任务未检测到跌倒事件时,机器人处于正常状态,舞蹈任务从存储单元中读取对应的舞蹈动作组,从动作组中解析第一帧动作数据,然后通过串行总线接口1向每个可动关节舵机发送相应的目标位置和运动时间,之后延时与运动时间相同的时间,再解析第二帧数据发送给舵机并延时,直到最后一帧;如图1所示,所述姿态检测任务检测到机器人跌倒事件时,发送消息给舞蹈任务和跌倒起身任务;舞蹈任务仍然按原来的顺序执行动作数据的读取和解析,但是并不通过与舵机连接的串行总线接口1发送给舵机,而是将数据发送给一个空闲的串行总线接口2;跌倒起身任务从存储单元中读取跌倒起身动作组,从动作组中逐帧解析动作数据并通过串行总线接口1发送给舵机,直到跌倒起身动作执行完毕;所述跌倒起身任务执行完跌倒起身动作后,通知舞蹈任务;舞蹈任务仍然按原来的顺序执行动作数据的读取和解析,但不再将数据发送给空闲的串行总线接口2,而是通过与舵机连接的串行总线接口1发送给舵机,直到整个舞蹈结束;由于在跌倒起身的过程中,舞蹈任务对动作数据的读取和解析流程并没有变化,只是把本来应该通过串行总线接口1向舵机发送的数据发送到了空闲串行总线接口2,而本来应该执行的舞蹈动作被跌倒起身任务替换成了跌倒起身动作,所以当跌倒起身动作执行完毕后,舞蹈任务执行的后续动作数据与其他机器人是完全一致的,实现了同步;
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
技术特征:
1.一种群舞机器人跌倒起身并同步动作的方法,其特征在于,一组群舞机器人由若干人形机器人组成,每个人形机器人包含若干由舵机驱动的可动关节;所述人形机器人内部设置有主控制器、无线收发模块、姿态传感器、存储单元;所述人形机器人的主控制器与所述舵机之间通过串行总线接口进行连接。2.根据权利要求1所述的一种群舞机器人跌倒起身并同步动作的方法,其特征在于,所述人形机器人的存储单元中保存着预先编写好的若干舞蹈动作组;每个舞蹈动作组由若干动作帧构成;每个动作帧包含每个可动关节舵机的目标位置以及运动时间。3.根据权利要求1所述的一种群舞机器人跌倒起身并同步动作的方法,其特征在于,所述人形机器人的主控制器中运行着多任务系统,主要任务包括无线收发任务、姿态检测任务、舞蹈任务、跌倒起身任务等。4.根据权利要求1所述的一种群舞机器人跌倒起身并同步动作的方法,其特征在于,所述人形机器人的无线收发任务收到启动指令后,通知舞蹈任务;舞蹈任务从存储单元中读取对应的舞蹈动作组,从动作组中解析第一帧动作数据,然后通过串行总线接口1向每个可动关节舵机发送相应的目标位置和运动时间,之后延时与运动时间相同的时间,再解析第二帧数据发送给舵机并延时,直到最后一帧。5.根据权利要求1所述的一种群舞机器人跌倒起身并同步动作的方法,其特征在于,所述姿态检测任务检测到机器人跌倒时,通知舞蹈任务和跌倒起身任务;舞蹈任务仍然按原来的顺序执行动作数据的读取和解析,但是并不通过与舵机连接的串行总线接口1发送给舵机,而是将数据发送给一个空闲的串行总线接口2;跌倒起身任务从存储单元中读取跌倒起身动作组,从动作组中逐帧解析动作数据并通过串行总线接口1发送给舵机,直到跌倒起身动作执行完毕。6.根据权利要求1所述的一种群舞机器人跌倒起身并同步动作的方法,其特征在于,所述跌倒起身任务执行完跌倒起身动作后,通知舞蹈任务;舞蹈任务仍然按原来的顺序执行动作数据的读取和解析,但不再将数据发送给空闲的串行总线接口2,而是通过与舵机连接的串行总线接口1发送给舵机,直到整个舞蹈结束。
技术总结
本发明涉及机器人技术领域,更具体地说是一种群舞机器人跌倒起身并同步动作的方法;机器人的内部设置有主控制器、无线收发模块、姿态传感器、存储单元;姿态检测任务可以检测到自身跌倒,舞蹈任务在跌倒时将动作数据发送到空闲串行总线接口,跌倒起身任务执行跌倒起身动作;机器人起身后可以自动同步与其他机器人的舞蹈动作,解决了群舞机器人跌倒后无法起身以及不能同步后续动作的问题。以及不能同步后续动作的问题。以及不能同步后续动作的问题。
技术研发人员:丁正正 张宇轩 张洪涛
受保护的技术使用者:灵起科技(深圳)有限公司
技术研发日:2021.12.15
技术公布日:2022/3/25
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1