房间划分方法及机器人与流程
本申请涉及计算机,特别涉及一种房间划分方法及机器人。
背景技术:
1、机器人在执行任务时可能需要遍历整个工作场所,若工作场所的范围较大,则机器人可以将工作场所划分为多个区域,在每一区域执行工作任务。目前,机器人多根据激光雷达的扫描数据建立工作场所的slam(simultaneous localization and mapping,即时定位与地图构建)环境地图,并在环境地图的基础上依据某种条件对工作场所进行划分。
2、对于住宅等存在多个房间的工作场所,可以识别出环境地图中的门,并依据门信息对环境地图进行划分,从而按照房间对工作场所进行分区。然而,这种方式对于门的识别准确性要求高,相关方案多采用匹配距离识别,识别效果差,可能给出现误识别或漏识别的问题。
技术实现思路
1、本申请实施例的目的在于提供一种房间划分方法及机器人,用于准确识别出门,并以门进行分区处理。
2、一方面,本申请提供了一种房间划分方法,包括:
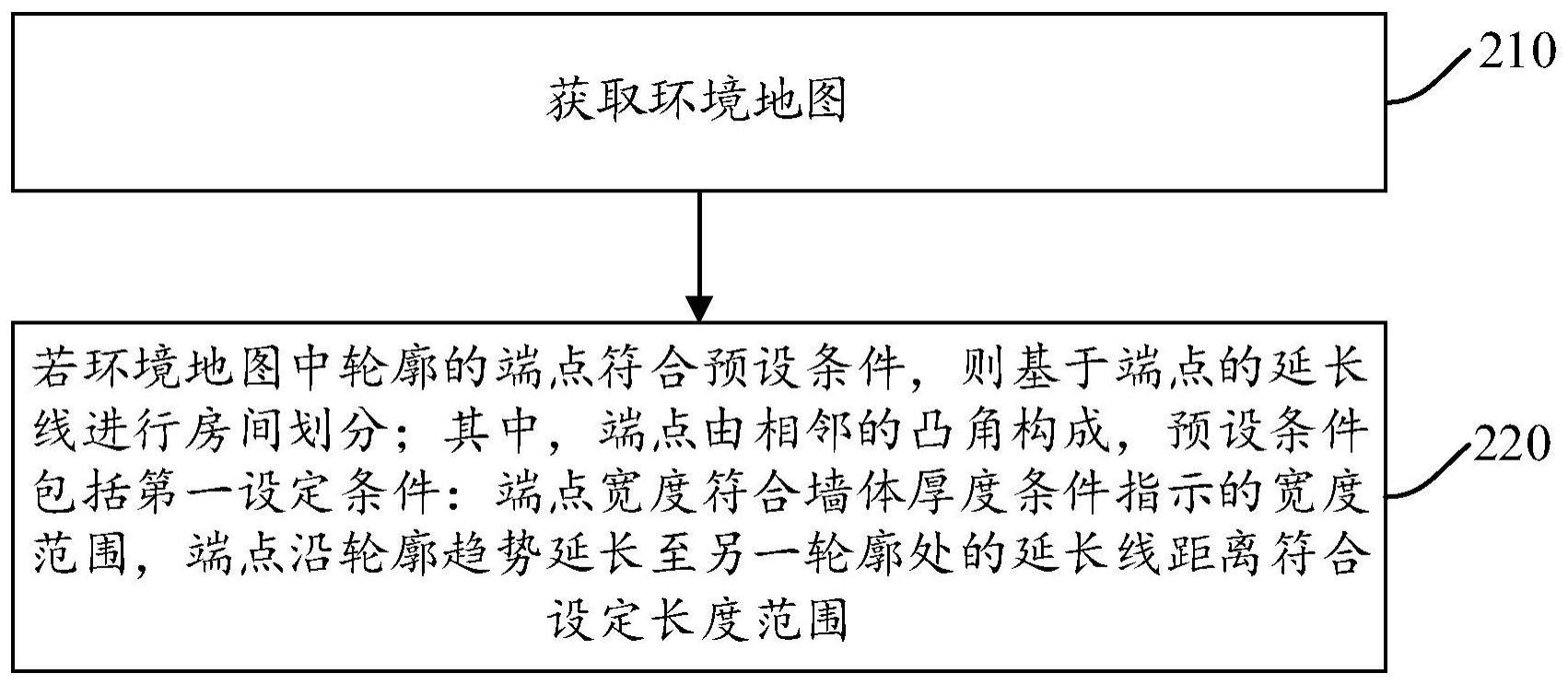
3、获取环境地图;
4、若环境地图中轮廓的端点符合预设条件,则基于所述端点的延长线进行房间划分;其中,所述端点由相邻的凸角构成,所述预设条件包括第一设定条件:端点宽度符合墙体厚度条件指示的宽度范围,端点沿轮廓趋势延长至另一轮廓处的延长线距离符合设定长度范围。
5、在一实施例中,所述预设条件还包括第二设定条件:所述延长线与轮廓划分出至少一闭合区域,所述闭合区域的尺寸符合设定尺寸条件。
6、在一实施例中,所述方法还包括:
7、基于所述环境地图确定可工作区域的外轮廓;
8、对所述外轮廓进行角点检测,获得若干凸角;
9、判断相邻的两个凸角之间的距离,是否位于所述宽度范围;
10、若是,判断所述两个凸角所构成的端点沿轮廓趋势延长至另一轮廓处的延长线距离是否符合所述长度范围;
11、若符合,判定所述两个凸角所构成的端点符合所述第一设定条件。
12、在一实施例中,所述方法还包括:
13、基于所述环境地图确定可工作区域的外轮廓;
14、对所述外轮廓进行角点检测,获得若干凸角;
15、判断相邻的两个凸角所构成的端点沿轮廓趋势延长至另一轮廓处的延长线距离,是否符合所述长度范围;
16、若符合,判断所述两个凸角之间的距离,是否位于所述宽度范围;
17、若是,判断所述两个凸角所构成的端点符合所述第一设定条件。
18、在一实施例中,所述墙体厚度条件通过如下方式获得:
19、依据第一方式确定所述墙体厚度条件;其中,所述第一方式为:获取厚度配置指令,所述厚度配置指令包含用户输入的目标厚度,根据目标厚度,确定所述墙体厚度条件;或,
20、依据第二方式确定所述墙体厚度条件;其中,所述第二方式为:获取与环境墙体性质对应的目标厚度,根据目标厚度,确定所述墙体厚度条件;或,
21、依据第三方式确定所述墙体厚度条件;其中,所述第三方式为:获取所有端点的端点宽度,并以重复率最高的端点宽度作为目标厚度,根据目标厚度,确定所述墙体厚度条件。
22、在一实施例中,所述根据目标厚度,确定所述墙体厚度条件,包括:
23、确定墙体厚度条件为墙体厚度等同于所述目标厚度;或,
24、以建图误差修改所述目标厚度,并根据修改后的目标厚度构建厚度区间;
25、确定墙体厚度条件为墙体厚度位于所述厚度区间。
26、在一实施例中,所述方法还包括:
27、若通过所述第一方式确定墙体厚度条件,确定所述第一方式对应的墙体厚度条件的优先级最高;
28、若未通过所述第一方式确定墙体厚度条件,判断所述第二方式对应的墙体厚度条件,是否包括所述第三方式对应的墙体厚度条件;
29、若是,确定所述第二方式对应的墙体厚度条件的优先级最高;
30、若否,确定所述第三方式对应的墙体厚度条件的优先级最高。
31、在一实施例中,所述方法还包括:
32、若所述环境地图中由闭合轮廓线构成墙体,对所述外轮廓进行闭操作处理。
33、在一实施例中,所述对所述外轮廓进行闭操作处理,包括:
34、以边长为指定数值的矩形框为结构元,对所述外轮廓执行闭操作处理;其中,所述指定数值根据墙体的厚度上限和建图误差确定。
35、另一方面,本申请提供了一种机器人,所述机器人包括:
36、处理器;
37、用于存储处理器可执行指令的存储器;
38、其中,所述处理器被配置为执行上述房间划分方法。
39、本申请方案,当环境地图中轮廓的端点符合预设条件,则基于端点的延长线进行房间划分;其中,端点由相邻凸角构成,预设条件包括第一条件:端点宽度符合墙体厚度条件指示的宽度范围,端点沿轮廓趋势延长至另一轮廓处的延长线距离符合设定长度范围;
40、根据墙体厚度条件指示的宽度范围,确定墙壁端点,并确定满足设定长度范围的延长线距离对应的墙壁端点,作为门位置的墙壁端点,从而以门位置的墙壁端点的延长线,作为闭合时的门体进行房间划分;通过墙体厚度条件和设定长度范围,准确识别出门,从而可根据门划分房间;
41、预设条件可以包括第二设定条件:延长线与轮廓划分出至少一闭合区域,闭合区域的尺寸符合设定尺寸条件;在延长线与轮廓划分出至少一闭合区域的情况下,确定可以实现分区效果,在闭合区域的尺寸满足尺寸条件时,确定划分出的闭合区域为房间,从而更准确地实现了房间划分。
技术特征:
1.一种房间划分方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述预设条件还包括第二设定条件:所述延长线与轮廓划分出至少一闭合区域,所述闭合区域的尺寸符合设定尺寸条件。
3.根据权利要求1所述的方法,其特征在于,所述方法还包括:
4.根据权利要求1所述的方法,其特征在于,所述方法还包括:
5.根据权利要求1所述的方法,其特征在于,所述墙体厚度条件通过如下方式获得:
6.根据权利要求5所述的方法,其特征在于,所述根据目标厚度,确定所述墙体厚度条件,包括:
7.根据权利要求5所述的方法,其特征在于,所述方法还包括:
8.根据权利要求3或4所述的方法,其特征在于,所述方法还包括:
9.根据权利要求8所述的方法,其特征在于,所述对所述外轮廓进行闭操作处理,包括:
10.一种机器人,其特征在于,所述机器人包括:
技术总结
本申请提供一种房间划分方法及机器人,方法包括:获取环境地图;若环境地图中轮廓的端点符合预设条件,则基于所述端点的延长线进行房间划分;其中,所述端点由相邻的凸角构成,所述预设条件包括第一设定条件:端点宽度符合墙体厚度条件指示的宽度范围,端点沿轮廓趋势延长至另一轮廓处的延长线距离符合设定长度范围。本申请方案,根据墙体厚度条件指示的宽度范围,确定墙壁端点,并确定满足设定长度范围的延长线距离对应的墙壁端点,作为门位置的墙壁端点,从而以门位置的墙壁端点的延长线,作为闭合时的门体进行房间划分;通过墙体厚度条件和设定长度范围,准确识别出门,从而可根据门划分房间。
技术研发人员:朱泽春,张晓东,余杰
受保护的技术使用者:尚科宁家(中国)科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!