水质监测自动导航无人船控制系统的制作方法
1.本实用新型涉及水质监测无人船领域,具体涉及水质监测自动导航无人船控制系统。
背景技术:
2.远程实时控制无人船进行水质监测是水质监测的常用手段,但无人船在实际使用时存在许多问题,例如不能长时间驻点监测、遇到障碍或者电量不足导致移动困难、远距离信息传输不及时或易出错,这些问题都导致无人船在水质监测领域的推广遇到一定的阻碍。
技术实现要素:
3.鉴于背景技术的不足,本实用新型提供了水质监测自动导航无人船控制系统。本实用新型提供了如下技术方案:
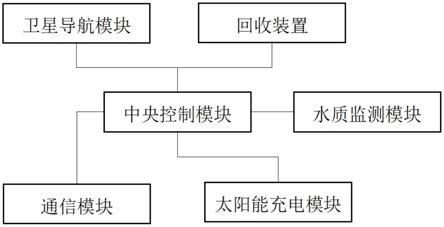
4.水质监测自动导航无人船控制系统,包括无人船,无人船包括中央控制模块,中央控制模块连接有卫星导航模块,无人船配置有太阳能充电模块,无人船的船体配置有回收装置,回收装置配套有无人机,无人船安装有通信模块,通信模块与中央控制模块相接,无人船通过通信模块与无人机通信。
5.具体的,卫星导航模块包括电子罗盘。
6.具体的,太阳能充电模块包括太阳能电池板,太阳能电池板安装在无人船的船体表面。
7.具体的,回收装置包括电磁吸盘、触式传感器,电磁吸盘、触式传感器安装在无人船的船体上方,电磁吸盘连接有电磁吸盘控制电路,电磁吸盘控制电路、触式传感器与中央控制模块连接,无人机安装有吊索。
8.具体的,中央控制模块为mcu。
9.优选的,通信模块为rf模块。
10.具体的,无人船包括水质监测模块,水质监测模块与中央控制模块连接,水质监测模块包括ph传感器、电导率传感器、溶解氧传感器、浊度传感器。
11.本实用新型与现有技术相比,具有以下有益效果:
12.1.通过使用太阳能充电模块供电,可以使无人船长期驻守在外工作,解决了无人船因电源供给问题无法长时间驻点监测的问题同时也能解决因电能不足移动困难的问题。
13.2.通过卫星导航模块完善无人船的定位功能,能够实时获取无人船的位置信息,防止无人船丢失,方便无人船维护、检修、回收,使长时间驻点检测后回收更为方便,也能够得知无人船是否处于移动困难的状态,位置监视更为精确。
14.3.通过在无人船上配置回收装置,使无人机可以直接对无人船进行回收或调动,无需工作人员赶赴现场,大大优化了无人船水质监测的工作流程,节省了人力,同时无人船可以通过无人机对接运输来解决因遇到障碍而移动困难的问题。
15.4.通过在无人船上配置通信模块,使无人机可以与无人船通信,工作人员就可以操作无人机去近距离获取无人船的检测数据与检测结果或进行工作任务的指示,不会出现远距离信息传输不及时或出错的情况,同时通信模块可以帮助无人机在回收过程中更精准地与无人船对接,提高回收工作的稳定性和效率。
附图说明
16.本实用新型有如下附图:
17.图1为本实用新型的无人船的结构示意图;
18.图2为本实用新型的无人船的船体部分的结构示意图。
19.其中:1,电磁吸盘;2,太阳能电池板。
具体实施方式
20.下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
21.如图1-2所示,本实施方案中:
22.水质监测自动导航无人船控制系统,包括无人船,无人船包括中央控制模块,中央控制模块连接有卫星导航模块,无人船配置有太阳能充电模块,无人船的船体配置有回收装置,回收装置配套有无人机,无人船安装有通信模块,通信模块与中央控制模块相接,无人船通过通信模块与无人机通信。
23.卫星导航模块包括电子罗盘。卫星导航模块定位和目标点的偏差不超过0.5米。
24.太阳能充电模块包括太阳能电池板2,太阳能电池板2安装在无人船的船体表面。在日均太阳充电不低于4小时、水面0流速,无风浪的情况下可长期驻点。
25.回收装置包括电磁吸盘1、触式传感器,电磁吸盘1、触式传感器安装在无人船的船体上方,电磁吸盘1连接有电磁吸盘1控制电路,电磁吸盘1控制电路、触式传感器与中央控制模块连接,电磁吸盘1 根据无人船重量选择相应的电磁吸盘1。无人机安装有吊索。
26.本实施例中,无人船船体质量为2000克,满载质量为3500克,同时考虑到水对于船的附着力,采用nx-p20/15的电磁吸盘1装于船体上方中部。
27.中央控制模块为mcu。
28.通信模块为rf模块。
29.无人船包括水质监测模块,水质监测模块与中央控制模块连接,水质监测模块包括ph传感器、电导率传感器、溶解氧传感器、浊度传感器,水质监测模块可以实时对水的ph、电导率、溶解氧、浊度等进行检测。
30.本实用新型的工作原理及使用流程:
31.数据采集:无人机根据无人船的定位进行定点巡航,对多个驻点的无人船进行数据采集,无人船使用rf模块传输给无人机数据信息或接受下一次工作的指示。
32.无人船回收或调动:操作人员指示无人机出动协助无人船工作,无人机街道指示后根据无人船的定位飞到无人船上方20米处,无人机同无人船使用通信模块通信,确定进入对接程序,无人船保持定点停泊模式,无人机此时降低高度至无人船上方2米,此时无人船通过中央控制模块指示电磁吸盘1控制电路给电磁吸盘1上电,无人机释放吊索,无人船保持在定点位置,无人机调整定点位置并寻找对接点,中央控制根据触式传感器发回的数
据确认无人船是否被对接成功,如果因定位、风力、水文的影响导致一段时间没有对接成功则进入手动对接模式,手动对接模式为操作人员在vr设备下操作遥控器或在手机app视频中操作手机手动对准并对接,无人机对无人船对接完成并回收后,可以将无人机调动至其他水域或回收返航。
33.上述依据本实用新型为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项实用新型技术思想的范围内,进行多样的变更以及修改。本项实用新型的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
技术特征:
1.水质监测自动导航无人船控制系统,其特征在于,包括无人船,所述无人船包括中央控制模块,所述中央控制模块连接有卫星导航模块,所述无人船配置有太阳能充电模块,所述无人船的船体配置有回收装置,所述回收装置配套有无人机,所述无人船安装有通信模块,所述通信模块与所述中央控制模块相接,所述无人船通过所述通信模块与所述无人机通信。2.根据权利要求1所述的水质监测自动导航无人船控制系统,其特征在于,所述卫星导航模块包括电子罗盘。3.根据权利要求1所述的水质监测自动导航无人船控制系统,其特征在于,所述太阳能充电模块包括太阳能电池板,所述太阳能电池板安装在所述无人船的船体表面。4.根据权利要求1所述的水质监测自动导航无人船控制系统,其特征在于,所述回收装置包括电磁吸盘、触式传感器,所述电磁吸盘、所述触式传感器安装在所述无人船的船体上方,所述电磁吸盘连接有电磁吸盘控制电路,所述电磁吸盘控制电路、所述触式传感器与所述中央控制模块连接,所述无人机安装有吊索。5.根据权利要求1所述的水质监测自动导航无人船控制系统,其特征在于,所述中央控制模块为mcu。6.根据权利要求1所述的水质监测自动导航无人船控制系统,其特征在于,所述通信模块为rf模块。7.根据权利要求1所述的水质监测自动导航无人船控制系统,其特征在于,所述无人船包括水质监测模块,所述水质监测模块与所述中央控制模块连接,所述水质监测模块包括ph传感器、电导率传感器、溶解氧传感器、浊度传感器。
技术总结
本实用新型涉及水质监测无人船领域,公开了水质监测自动导航无人船控制系统,包括无人船,无人船包括中央控制模块,中央控制模块连接有卫星导航模块,无人船配置有太阳能充电模块,无人船的船体配置有回收装置,回收装置配套有无人机,无人船安装有通信模块,通信模块与中央控制模块相接,无人船通过通信模块与无人机通信。解决了无人船不能长时间驻点监测、遇到障碍或者电量不足导致移动困难、远距离信息传输不及时或易出错的问题。息传输不及时或易出错的问题。息传输不及时或易出错的问题。
技术研发人员:吴勇 崇庆华
受保护的技术使用者:无锡比特信息科技有限公司
技术研发日:2021.11.02
技术公布日:2022/4/15
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1