数值控制系统的制作方法
本公开涉及数值控制系统。
背景技术:
1、数值控制装置根据预先制作的数值控制程序,使构成机床的多个机械要素(工具、工作台、保持工件的夹具等)沿着多个控制轴移动,由此,对工件进行加工。另外,数值控制装置具有在机床的加工中并行地进行用于确认机床的各机械要素是否相互干扰的干扰检查运算的干扰检查功能(例如,参照专利文献1)。
2、在专利文献1所示的技术中,基于将作为对象的2个机械要素进行分离的分离平面以及与该分离平面正交的分离轴的有无来判断干扰的有无的、所谓分离轴方式,来判断干扰的有无。关于能否在2个机械要素之间定义这样的分离平面以及分离轴,需要与各机械要素的位置以及姿势相关的信息,因此,在专利文献1所示的技术中,在以规定的控制周期取得与各机械要素的位置相关的位置信息和与姿势相关的姿势信息之后,进行与分离轴相关的计算。
3、现有技术文献
4、专利文献
5、专利文献1:日本专利第5857803号
技术实现思路
1、发明要解决的课题
2、但是,在以往的数值控制装置中,通过进行使用了与各机械要素的形状相关的形状信息、与各机械要素的位置相关的位置信息、以及与各机械要素的姿势相关的姿势信息的干扰检查运算,来判断构成规定的检查对象组的2个机械要素彼此是否干扰。在数值控制装置中,需要对多个检查对象组进行这样的干扰检查运算,因此,可能花费时间。
3、因此,若检查对象组的数量变多,则可能无法在基于数值控制装置的机床的控制周期内对全部检查对象组完成干扰检查运算。另外,因此,可能无法在适当的时刻检测机械要素彼此的干扰。
4、本公开是鉴于上述课题而完成的,提供一种能够在短时间内结束数值控制装置中的干扰检查运算的数值控制系统。
5、用于解决课题的手段
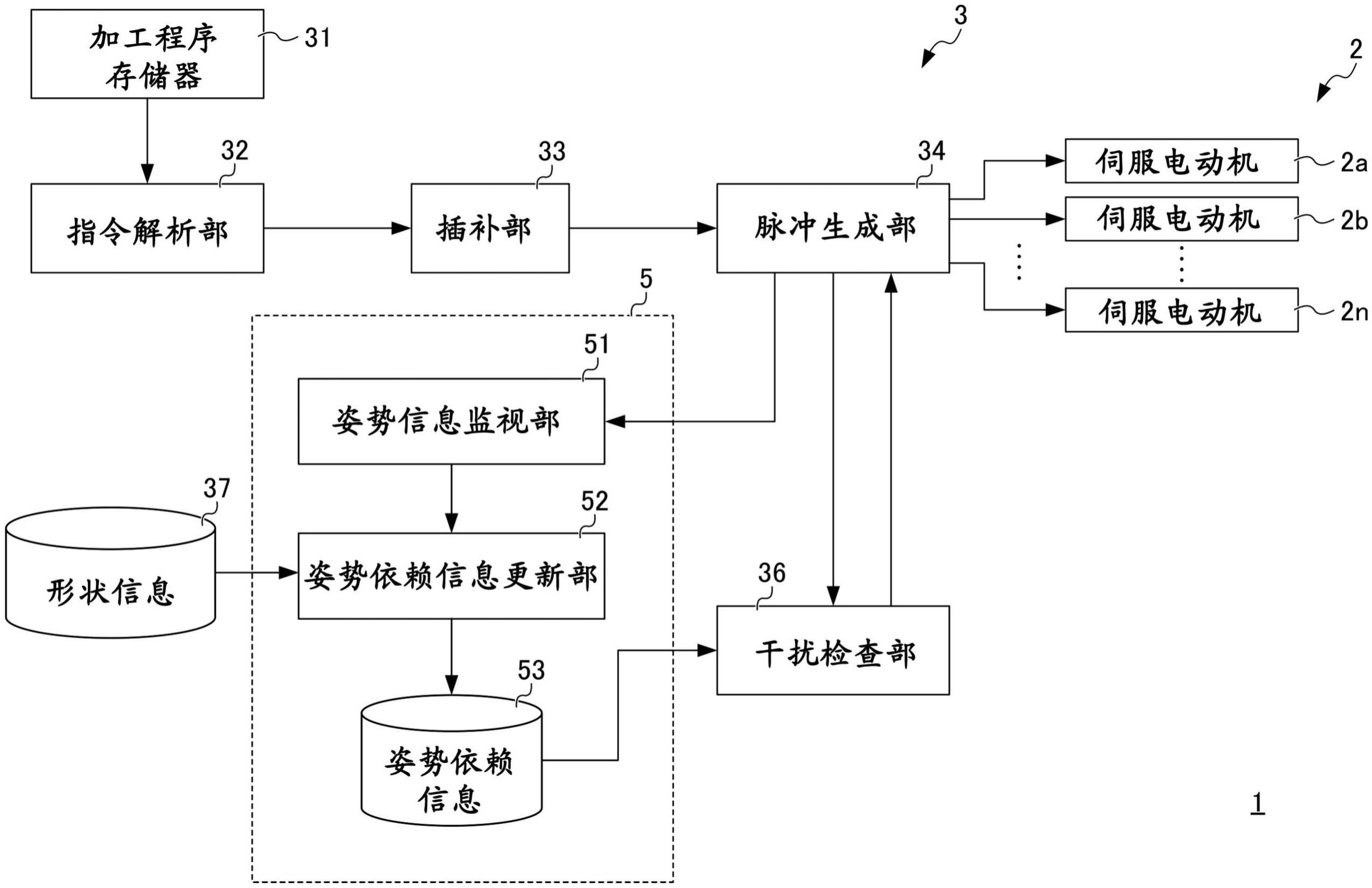
6、本公开的一方式是一种数值控制系统,根据移动指令使机床的多个机械要素沿着多个轴移动,并且进行构成规定的检查对象组的2个机械要素之间的干扰检查运算,该数值控制系统具有:姿势依赖信息存储部,其存储姿势依赖信息,该姿势依赖信息是依赖于构成所述检查对象组的2个机械要素的各自的形状和姿势的信息;干扰检查部,其取得所述机械要素的位置信息,根据该位置信息和存储在所述姿势依赖信息存储部中的所述姿势依赖信息进行所述干扰检查运算;以及姿势依赖信息更新部,其取得所述机械要素的形状信息和姿势信息,根据所述形状信息和所述姿势信息更新所述姿势依赖信息,在所述姿势信息不变化的情况下,所述姿势依赖信息更新部不更新所述姿势依赖信息。
7、发明效果
8、根据本公开的一方式,作为进行干扰检查运算所需的信息的一部分,使姿势依赖信息存储部存储姿势依赖信息,该姿势依赖信息是依赖于构成检查对象组的2个机械要素的各自的形状以及姿势的信息。干扰检查部取得在移动指令下移动的机械要素的位置信息,根据该位置信息和存储在姿势依赖信息存储部中的姿势依赖信息进行干扰检查运算。另外,姿势依赖信息更新部取得机械要素的形状信息和姿势信息,根据这些形状信息和姿势信息更新存储在姿势依赖信息存储部中的姿势依赖信息,在姿势信息不变化的情况下,不更新姿势依赖信息。因此,根据本公开的一方式,只要机械要素的姿势信息不变化,则在干扰检查部中,能够反复使用存储在姿势依赖信息存储部中的姿势依赖信息来进行干扰检查运算。因此,根据本公开的一方式,不需要在每次进行干扰检查运算时再次计算姿势依赖信息,因此,能够在短时间内结束干扰检查部中的干扰检查运算。
技术特征:
1.一种数值控制系统,根据移动指令使机床的多个机械要素沿着多个轴移动,并且进行构成规定的检查对象组的2个机械要素之间的干扰检查运算,其特征在于,
2.根据权利要求1所述的数值控制系统,其特征在于,
3.根据权利要求1或2所述的数值控制系统,其特征在于,
4.根据权利要求1~3中任一项所述的数值控制系统,其特征在于,
5.根据权利要求1~4中任一项所述的数值控制系统,其特征在于,
6.根据权利要求1~4中任一项所述的数值控制系统,其特征在于,
技术总结
数值控制装置(3)根据移动脉冲使机床(2)的多个机械要素沿着多个控制轴移动,并且进行构成规定的检查对象组的2个机械要素之间的干扰检查运算。数值控制装置(3)具有:姿势依赖信息存储部(53),其存储姿势依赖信息,该姿势依赖信息是依赖于构成检查对象组的2个机械要素的各自的形状和姿势且不依赖于各自的位置的信息;干扰检查部(36),其根据机械要素的位置信息和姿势依赖信息进行干扰检查运算;以及姿势依赖信息更新部(52),其取得机械要素的形状信息和姿势信息,根据这些形状信息和姿势信息更新姿势依赖信息,在姿势信息不变化的情况下,姿势依赖信息更新部(52)不更新姿势依赖信息。
技术研发人员:泽冈浩贵
受保护的技术使用者:发那科株式会社
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!