处理方法、程序及机器人系统与流程
本发明涉及一种处理方法、程序和机器人系统。
背景技术:
1、以往,有使用通过手动操纵机器人而得到的数据来生成机器人的控制程序的技术。例如,专利文献1公开了根据检测示教用手动喷枪的动作而生成的手动喷涂动作数据,生成涂装用机器人的动作控制数据的技术。专利文献1的技术为了降低被操作者的手移动的示教用手动喷枪的移动路径的波动及晃动的影响,生成动作控制数据,以使机器人的喷射枪在从喷射开始位置到喷射停止位置的喷射区间沿着直线或特定的曲线移动。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开2018-1381号公报
技术实现思路
1、专利文献1的技术将作为机器人的末端执行器的喷射枪的移动路径规定为直线或圆弧等特定的曲线。例如,在具有复杂形状的工件为涂装对象的情况下,示教用手动喷枪的移动路径的形状也变得复杂。由于喷射枪的移动路径使用连结喷射开始位置和喷射停止位置的直线或特定的曲线形成,因此难以高精度地反映示教用手动喷枪的移动路径。
2、本发明的目的在于提供一种能够高精度地反映末端执行器的移动且生成结构简单的数据的处理方法、程序及机器人系统。
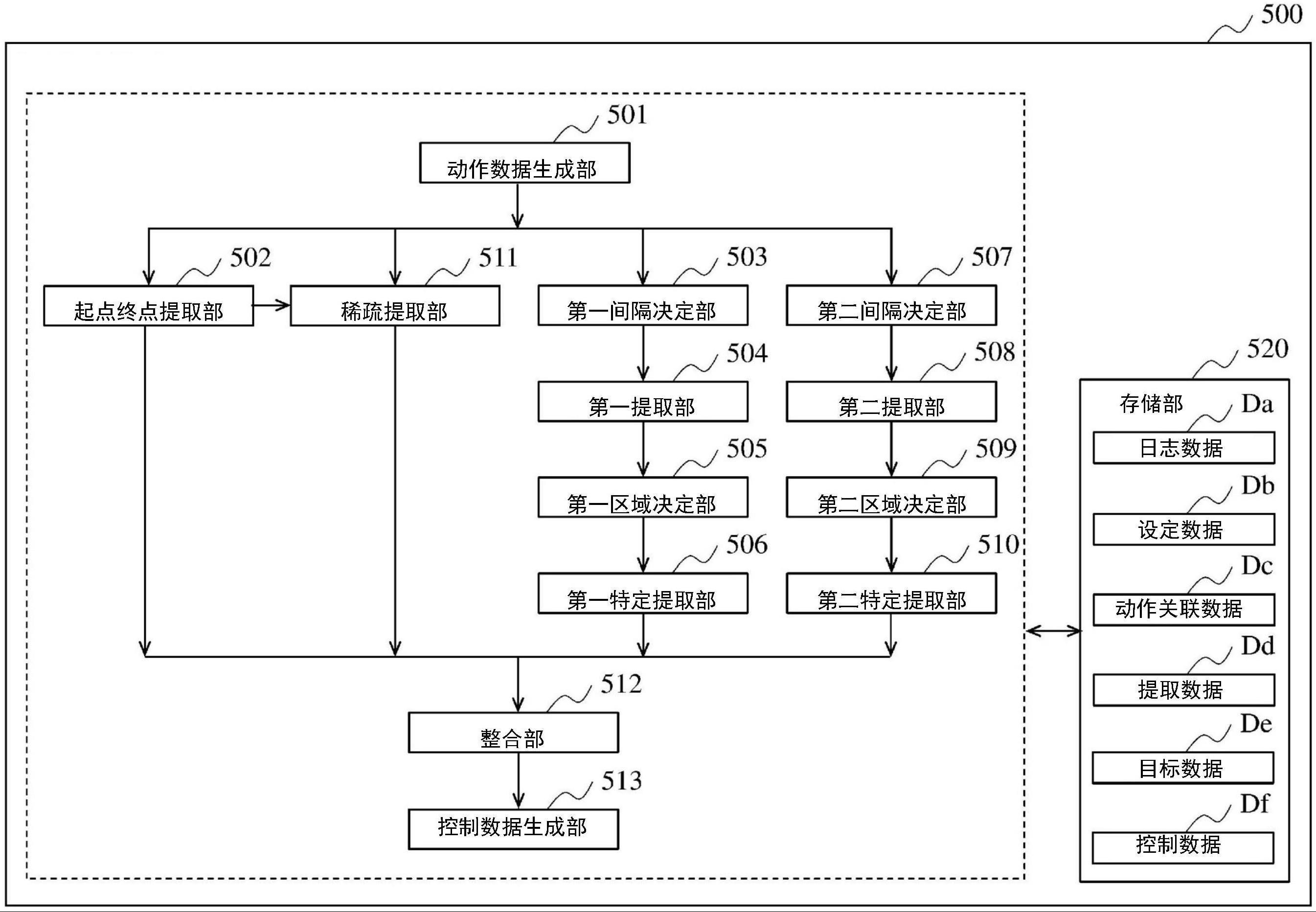
3、本发明一个方式的处理方法是示教数据的处理方法,所述示教数据包括多个示教点,该多个示教点包含安装在机器人上的末端执行器的位置姿势信息,且按照时间顺序形成所述末端执行器的移动轨迹,所述处理方法包含第一处理和第二处理中的一个或两个,所述第一处理从所述多个示教点中提取基准示教点,其中,提取从比所述基准示教点靠前规定间隔的所述示教点的位置朝向所述基准示教点的位置的方向向量与从所述基准示教点位置朝向比所述基准示教点靠后规定间隔的所述示教点的位置的方向向量之差为阈值以上的所述基准示教点,所述第二处理从所述多个示教点中提取所述基准示教点,其中,提取比所述基准示教点靠前规定间隔的所述示教点的姿势与所述基准示教点的姿势之差为阈值以上的所述基准示教点,或者,所述基准示教点的姿势与比所述基准示教点靠后规定间隔的所述示教点的姿势之差为阈值以上的所述基准示教点。
技术特征:
1.一种处理方法,是示教数据的处理方法,其特征在于,
2.根据权利要求1所述的处理方法,其特征在于,
3.根据权利要求1或2所述的处理方法,其特征在于,
4.根据权利要求3所述的处理方法,其特征在于,
5.根据权利要求3或4所述的处理方法,其特征在于,
6.根据权利要求1~5中任一项所述的处理方法,其特征在于,
7.根据权利要求1~6中任一项所述的处理方法,其特征在于,
8.根据权利要求7所述的处理方法,其特征在于,
9.根据权利要求7或8所述的处理方法,其特征在于,
10.根据权利要求1~9中任一项所述的处理方法,其特征在于,
11.根据权利要求10所述的处理方法,其特征在于,
12.根据权利要求1至11中任一项所述的处理方法,其特征在于,
13.根据权利要求1至12中任一项所述的处理方法,其特征在于,
14.一种程序,其特征在于,用于执行权利要求1~13中任一项所述的处理方法。
15.一种机器人系统,其特征在于,包括:
技术总结
本发明的处理方法包括第一处理和第二处理中的一个或两个,第一处理和第二处理从包含末端执行器(120)的位置姿势信息且按照时间顺序形成所述末端执行器的移动轨迹的多个示教点提取基准示教点。所述第一处理提取从比所述基准示教点靠前规定间隔的所述示教点的位置朝向所述基准示教点的位置的方向向量与从所述基准示教点的位置朝向比所述基准示教点靠后规定间隔的所述示教点的位置的方向向量之差为阈值以上的所述基准示教点。所述第二处理提取比所述基准示教点靠前规定间隔的所述示教点的姿势与所述基准示教点的姿势之差为阈值以上的所述基准示教点,或者,所述基准示教点的姿势与比所述基准示教点靠后规定间隔的所述示教点的姿势之差为阈值以上的所述基准示教点。
技术研发人员:朝户达健,矶田秀树,胜部优仁
受保护的技术使用者:川崎重工业株式会社
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!